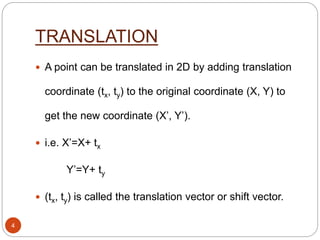
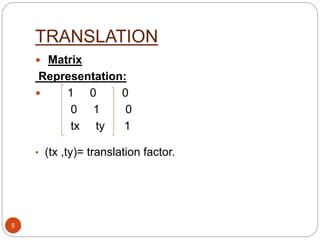
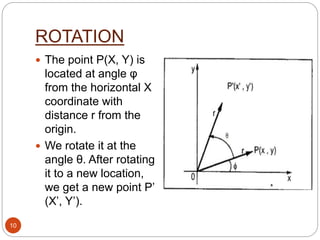
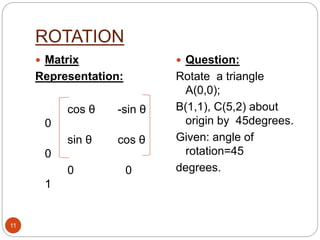
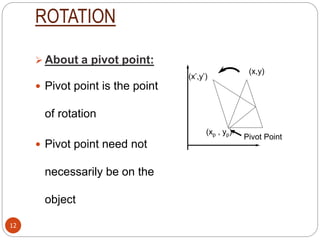
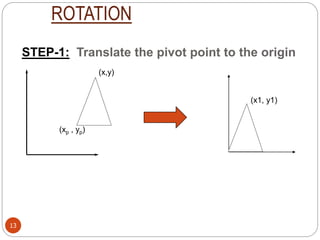
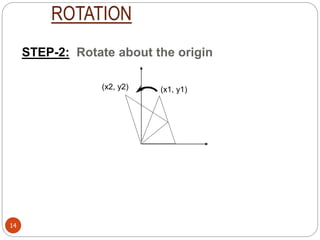
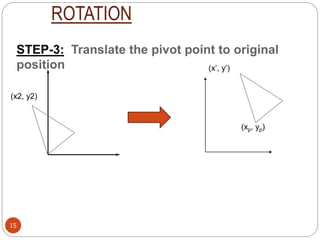
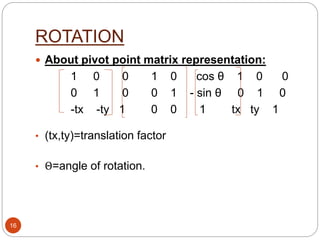
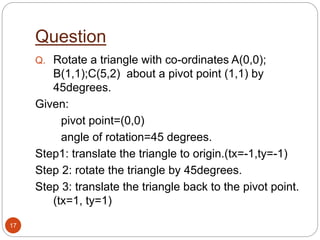
This document discusses 2D transformations including translation and rotation. Translation moves an object to a new position by adding a translation vector to the original coordinates. Rotation changes the orientation of an object by a certain angle. Rotation can occur around the origin or a pivot point, with the latter requiring three steps - translate to origin, rotate, translate back. The document provides examples and matrix representations of these transformations.













































![COMPUTER GRAPHICS AND VISUALIZATION :MODULE-02 notes [BCG402-CG&V].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/module-02notesbcg402-cgv-250506151048-aef09ce3-thumbnail.jpg?width=640&height=640&fit=bounds)