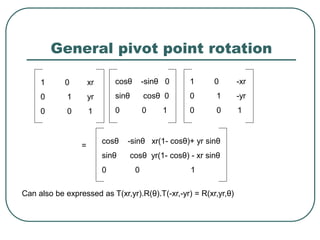
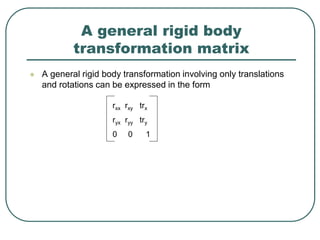
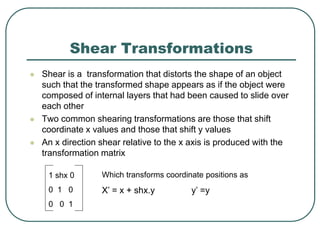
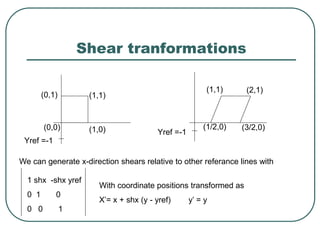
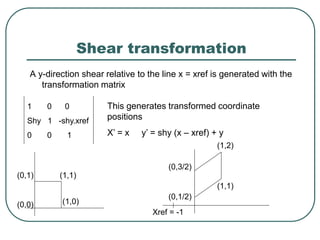
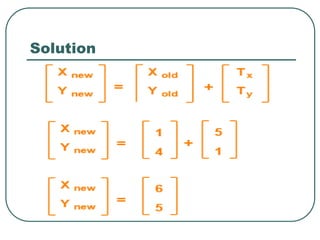
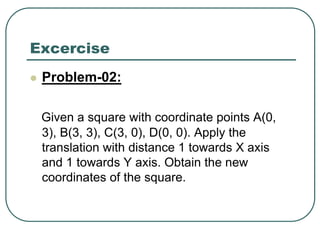
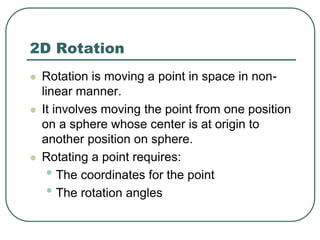
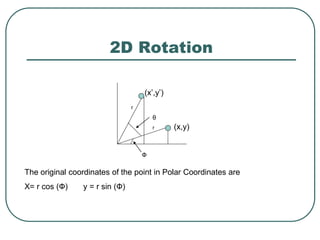
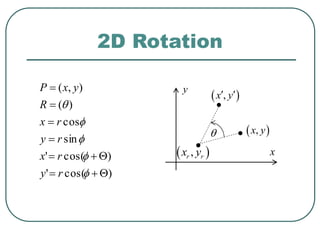
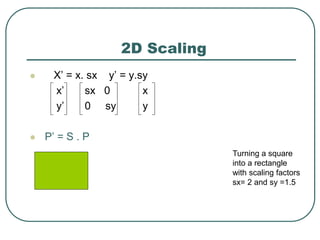
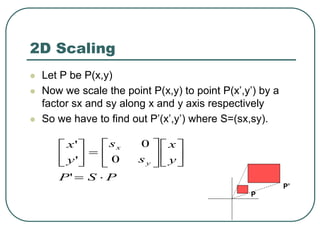
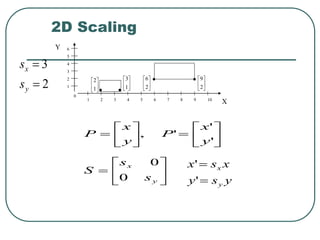
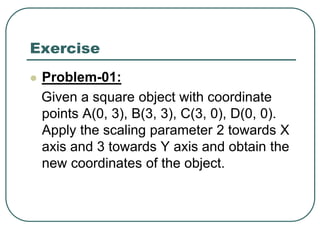
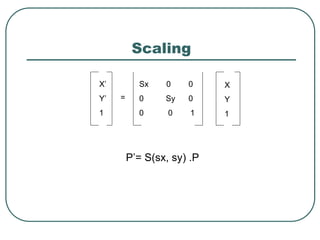
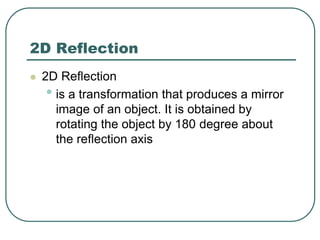
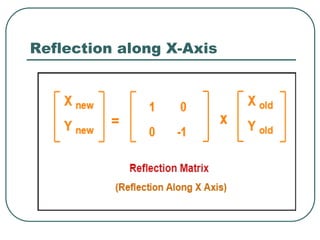
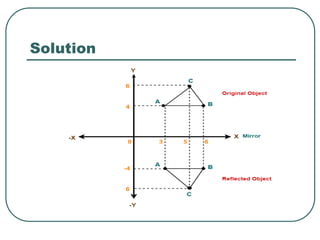
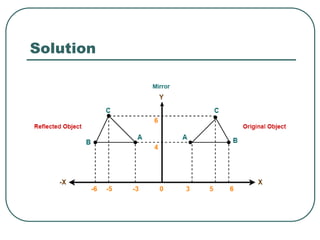
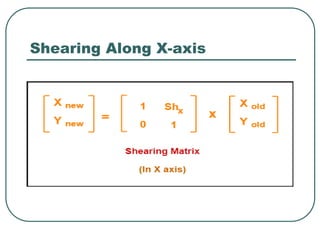
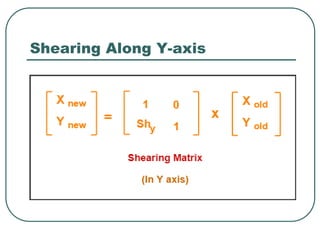
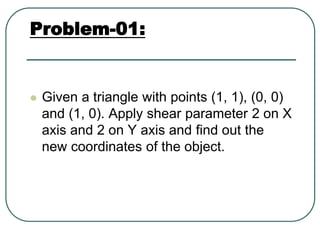
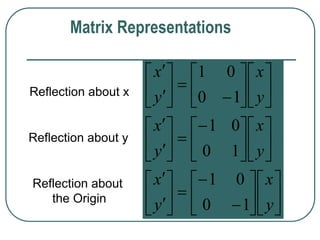
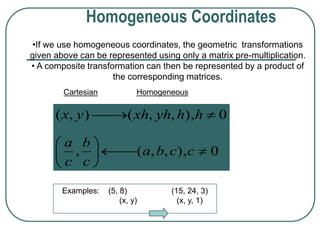
Geometric transformations play an important role in computer graphics by allowing graphics to be repositioned on the screen or changed in size and orientation. There are several types of 2D transformations including translation, rotation, scaling, reflection, and shearing. Translation moves an object by translating each vertex by a certain distance. Rotation moves a point around a center point by a certain angle. Scaling enlarges or shrinks an object by a scaling factor. Reflection produces a mirror image of an object across an axis. Shearing distorts an object by shifting coordinate values.

![[6]-36 RM
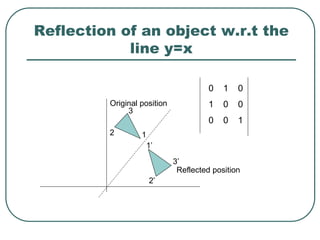
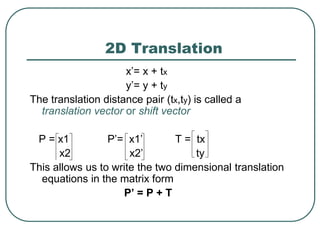
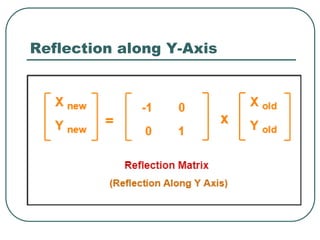
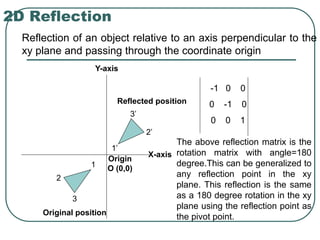
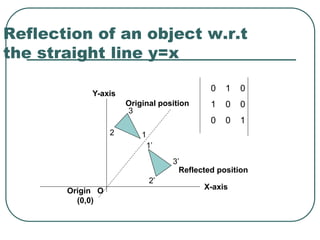
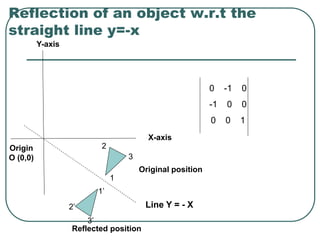
Reflections
Initial
Object
Reflection about x
y = y
x
y
Reflection about
origin
x = x
y = y
Reflection about y
x = x](https://image.slidesharecdn.com/transformationit-220721185230-3fcbd63c/85/transformation-IT-ppt-36-320.jpg)
![
x
y
x
y
t
t
x
y
x
y
x
y
s
s
x
y
x
y
x
y
cos sin
sin cos
0
0
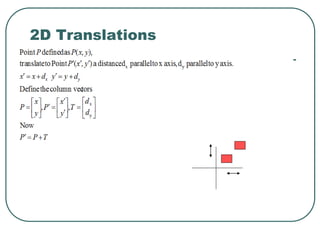
Translation
Rotation [Origin]
Scaling [Origin]
Matrix Representations](https://image.slidesharecdn.com/transformationit-220721185230-3fcbd63c/85/transformation-IT-ppt-56-320.jpg)
![[6]-58 RM
y
x
h
y
x
y
x
h
y
x
1
0
1
1
0
1
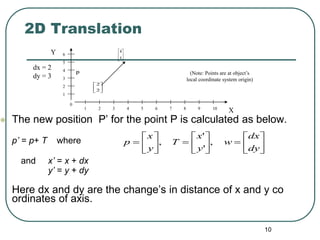
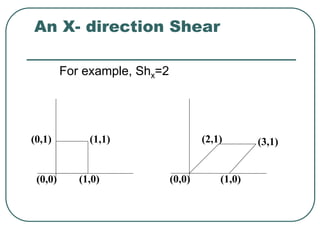
Shear along x
Matrix Representations
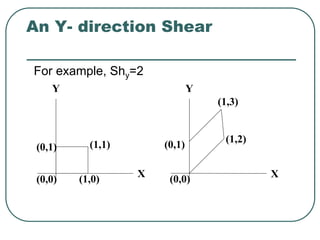
Shear along y](https://image.slidesharecdn.com/transformationit-220721185230-3fcbd63c/85/transformation-IT-ppt-58-320.jpg)
![[6]-59 RM
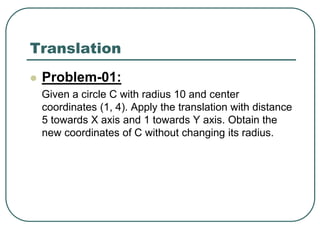
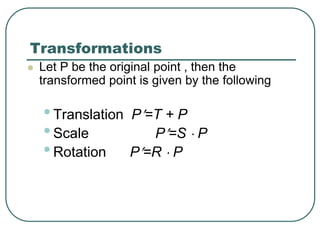
Homogeneous Coordinates
To obtain square matrices an additional row was added to the matrix
and an additional coordinate, the w-coordinate, was added to the
vector for a point. In this way a point in 2D space is expressed in
three-dimensional homogeneous coordinates.
This technique of representing a point in a space whose dimension is
one greater than that of the point is called homogeneous
representation. It provides a consistent, uniform way of handling affine
transformations.](https://image.slidesharecdn.com/transformationit-220721185230-3fcbd63c/85/transformation-IT-ppt-59-320.jpg)
![
x
y
t
t
x
y
x
y
x
y
x
y
s
s
x
y
x
y
x
y
1
1 0
0 1
0 0 1 1
1
0
0
0 0 1 1
1
0 0
0 0
0 0 1 1
cos sin
sin cos
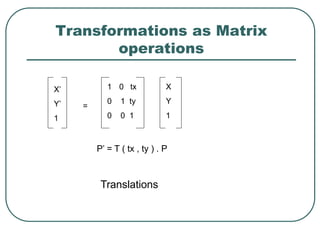
Translation
P’=TP
Rotation [O]
P’=RP
Scaling [O]
P’=SP
Basic Transformations
Homogeneous Coordinates](https://image.slidesharecdn.com/transformationit-220721185230-3fcbd63c/85/transformation-IT-ppt-62-320.jpg)
![
1
]
[
1
y
x
T
y
x
If,
1
]
[
1
1
y
x
T
y
x
then,
)
(
)
(
1
,
1
)
,
(
)
(
)
(
)
,
(
)
,
(
1
1
1
1
h
H
h
H
s
s
S
s
s
S
R
R
t
t
T
t
t
T
x
x
y
x
y
x
y
x
y
x
Examples:
Inverse of Transformations](https://image.slidesharecdn.com/transformationit-220721185230-3fcbd63c/85/transformation-IT-ppt-63-320.jpg)
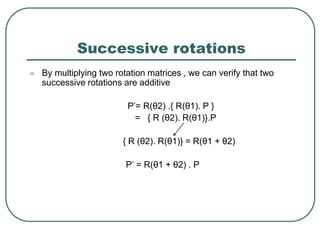
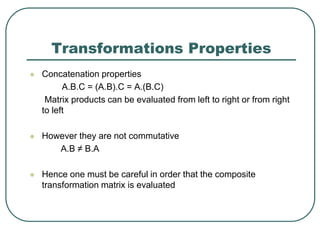
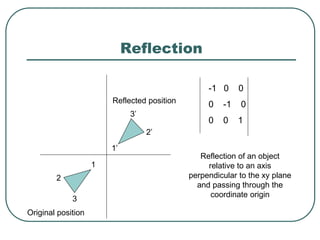
![Successive translations
Successive translations are additive
P’= T(tx1, ty1) .[T(tx2, ty2)] P
= {T(tx1, ty1). T(tx2, ty2)}.P
T(tx1, ty1). T(tx2, ty2) = T(tx1+tx2 , ty1 + ty2)
1 0 tx1+tx2
0 1 ty1+ty2
0 0 1
1 0 tx1
0 1 ty1
0 0 1
1 0 tx2
0 1 ty2
0 0 1
=](https://image.slidesharecdn.com/transformationit-220721185230-3fcbd63c/85/transformation-IT-ppt-65-320.jpg)