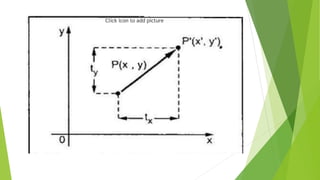
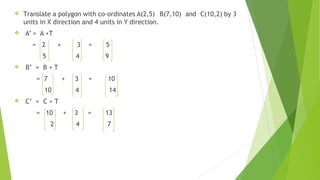
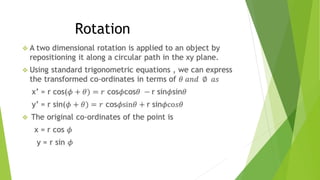
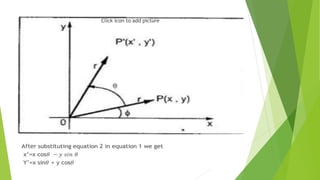
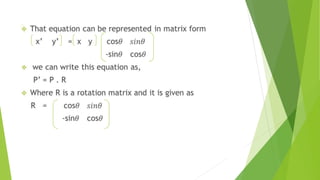
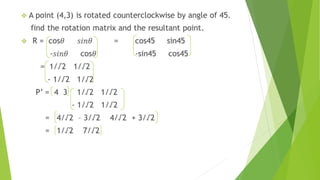
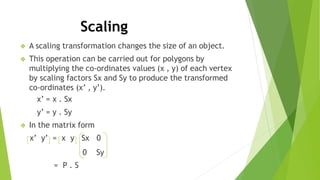
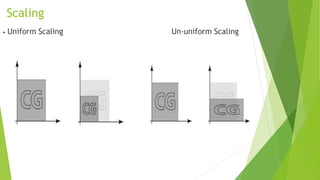
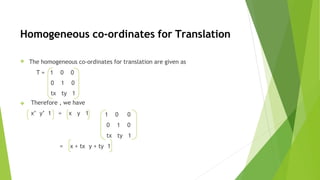
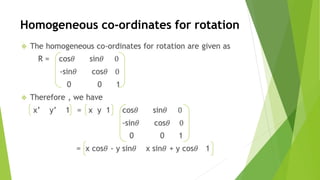
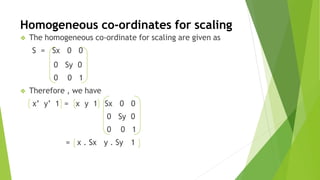
This document discusses 2D transformations in computer graphics, including translation, rotation, and scaling. Translation moves an object by adding offsets to x and y coordinates. Rotation uses trigonometry and rotation matrices to reposition objects around a central point. Scaling enlarges or shrinks objects by multiplying their coordinates by scaling factors. Homogeneous coordinates allow representing these transformations with matrix multiplications.