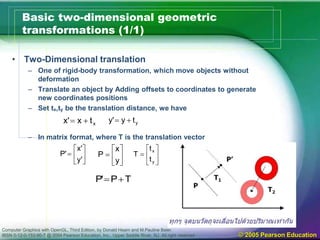
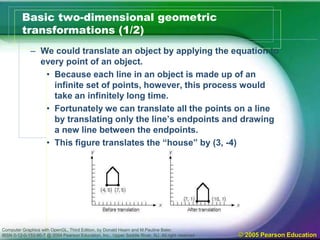
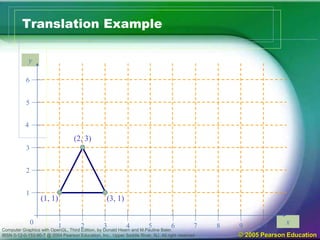
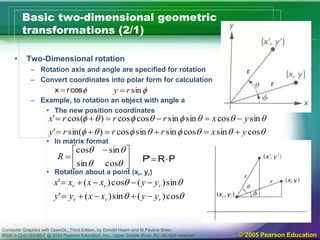
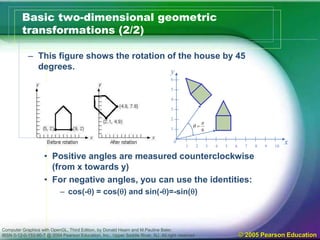
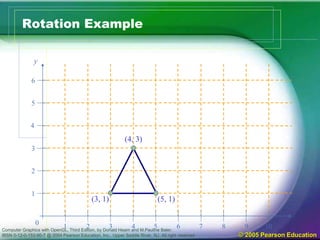
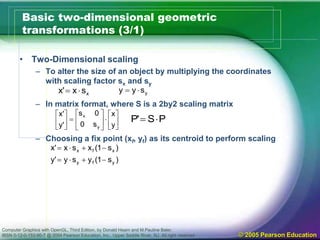
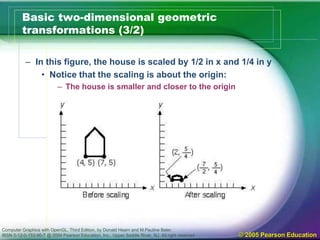
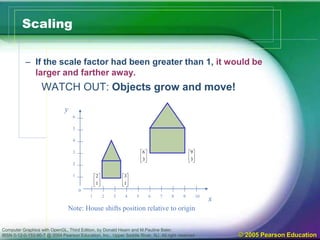
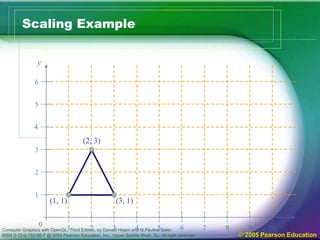
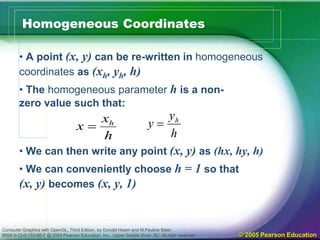
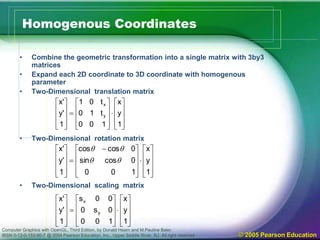
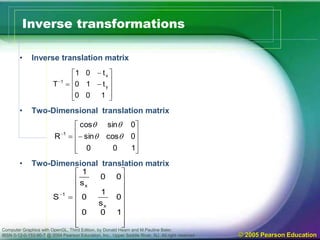
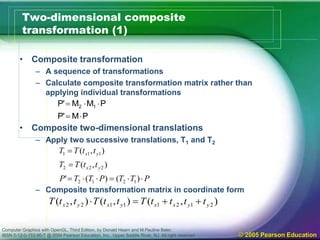
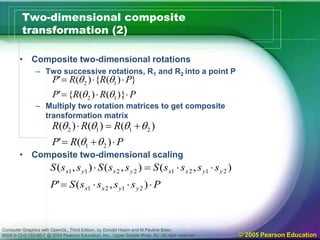
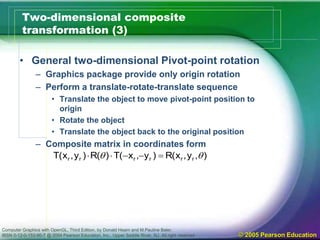
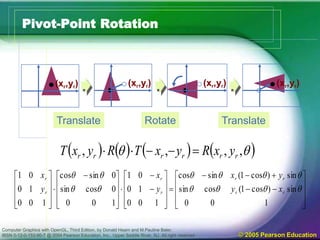
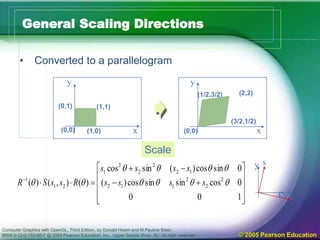
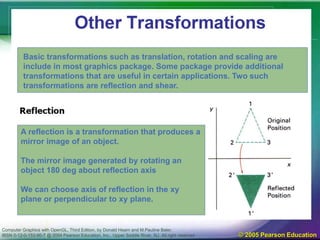
The document discusses various 2D geometric transformations including translation, rotation, and scaling. Translation moves objects by adding offsets to coordinates. Rotation changes the orientation of objects by specifying an axis and angle of rotation. Scaling alters the size of objects by multiplying coordinates by scaling factors. These transformations can be represented by 3x3 matrices using homogeneous coordinates, allowing multiple transformations to be combined through matrix multiplication.