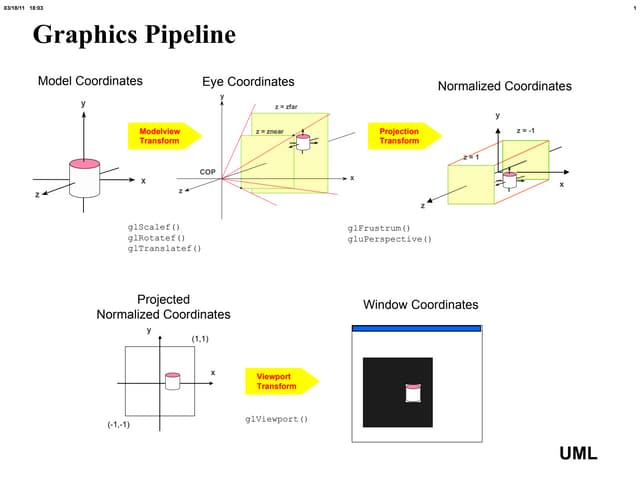
This document discusses various 3D geometric transformations including translation, scaling, rotation, and coordinate transformations. It provides details on:
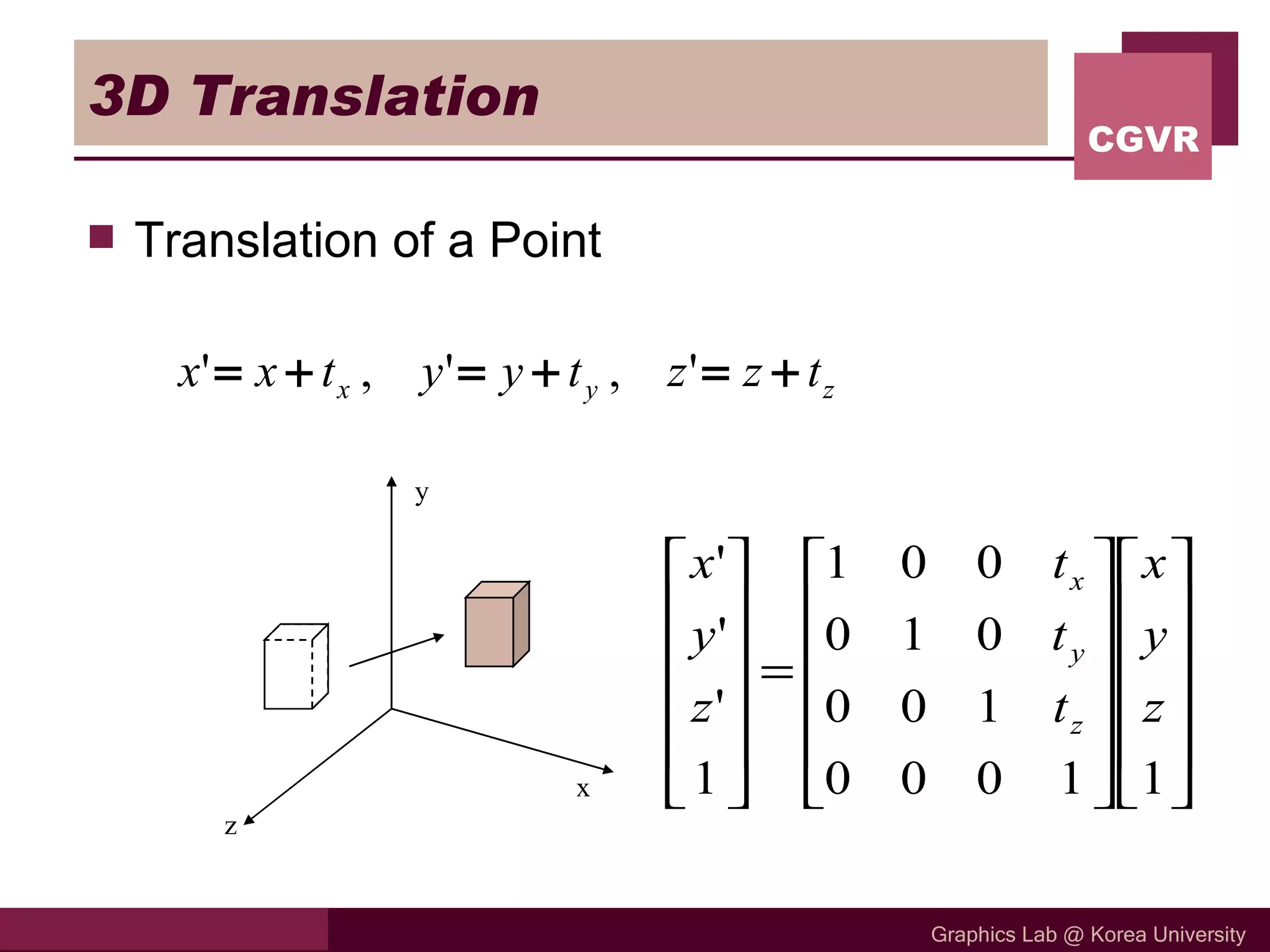
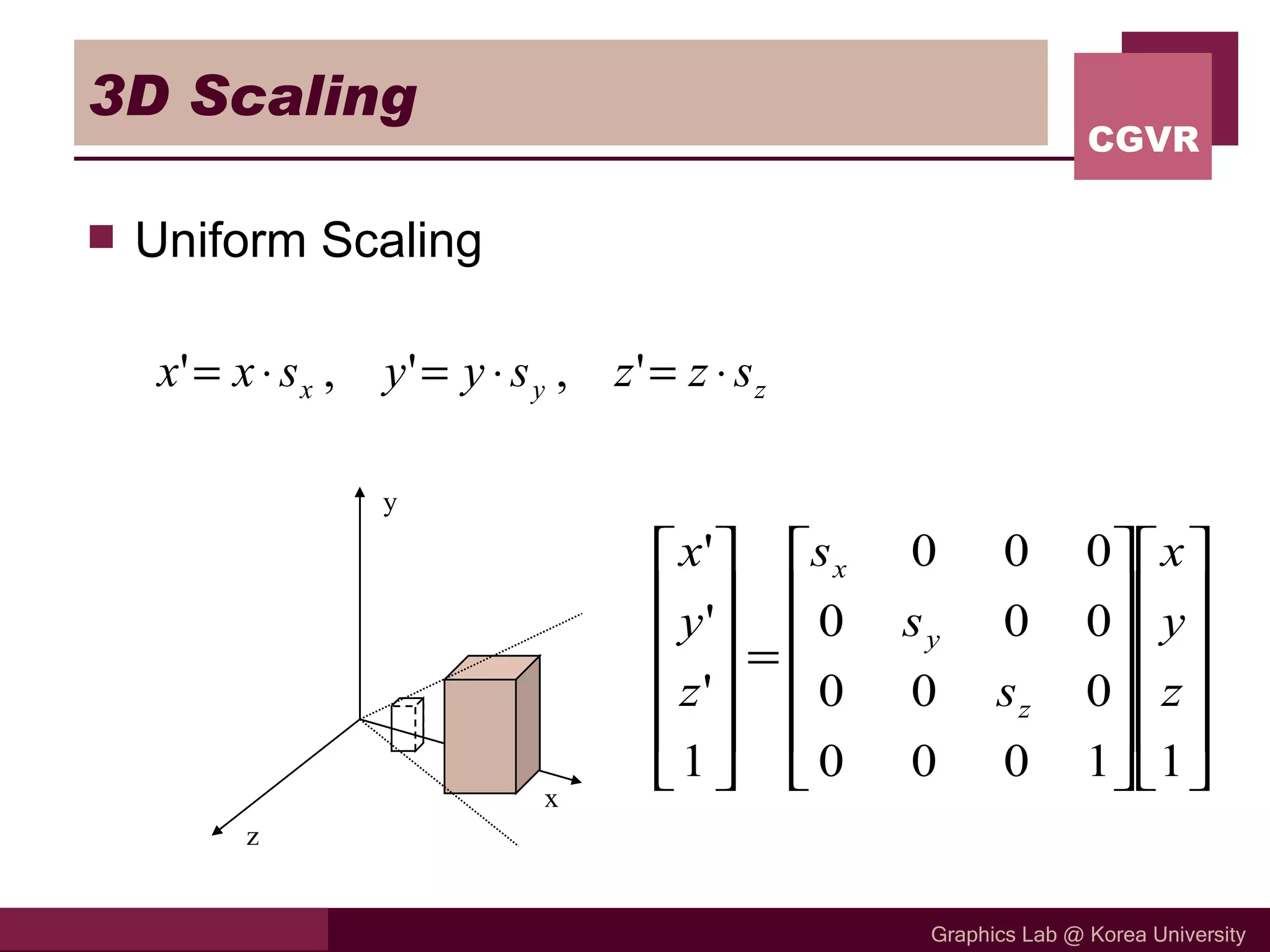
1) How translation, uniform scaling, and relative scaling transformations work in 3D space.
2) How rotations around the x, y, z axes as well as general 3D rotations around arbitrary axes are performed.
3) How quaternions can be used to represent rotations and how rotation matrices are derived from quaternions.
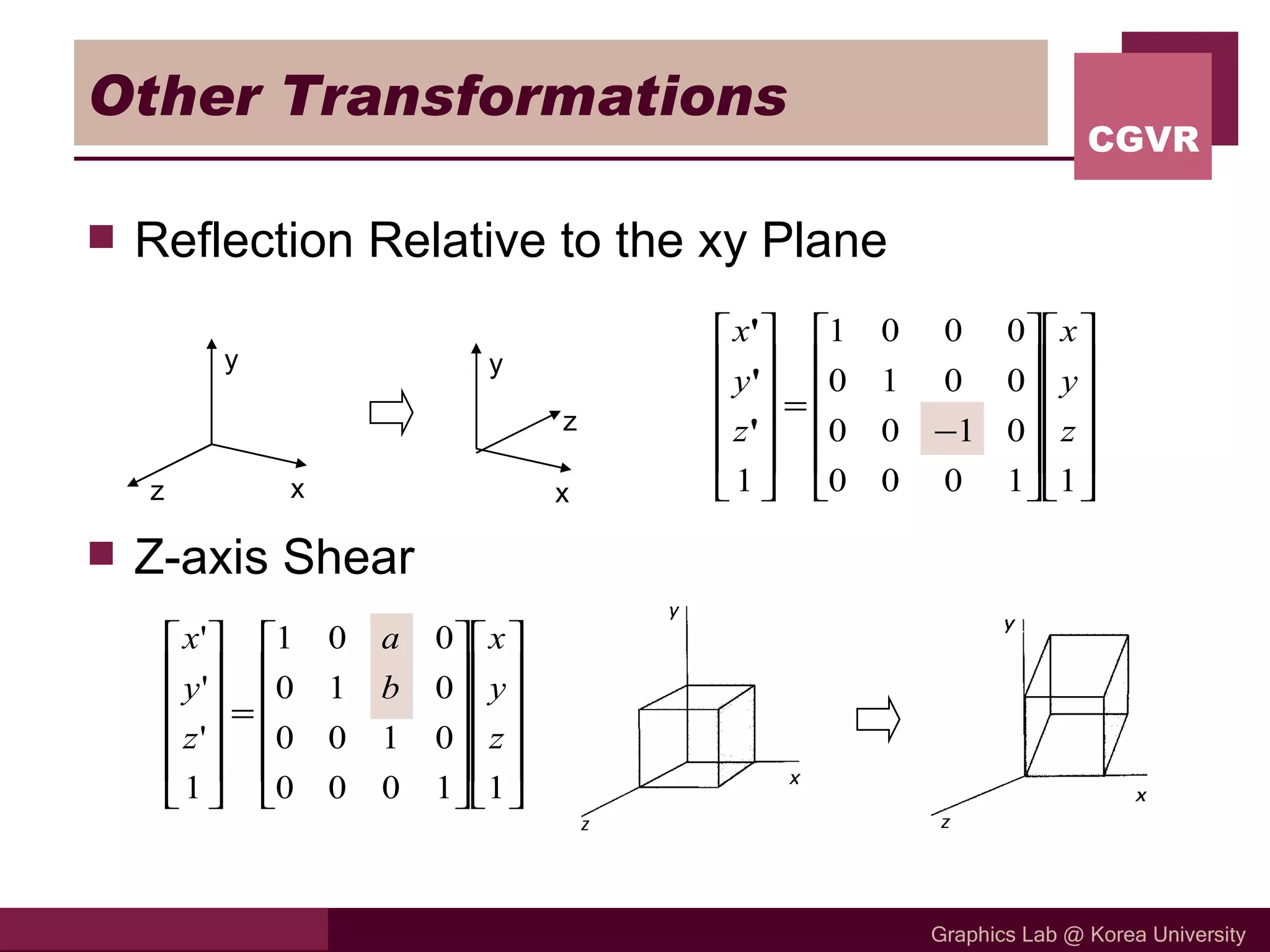
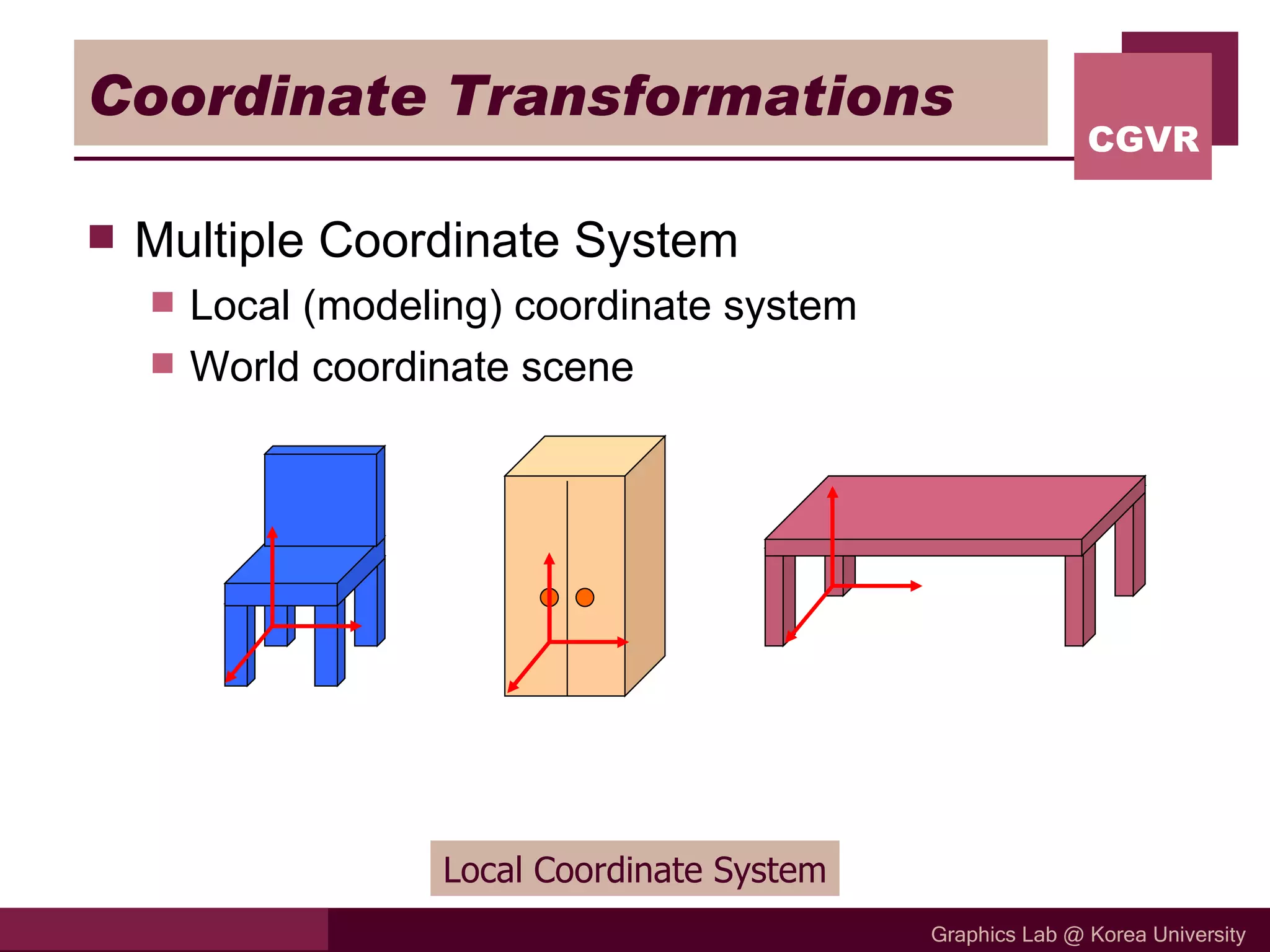
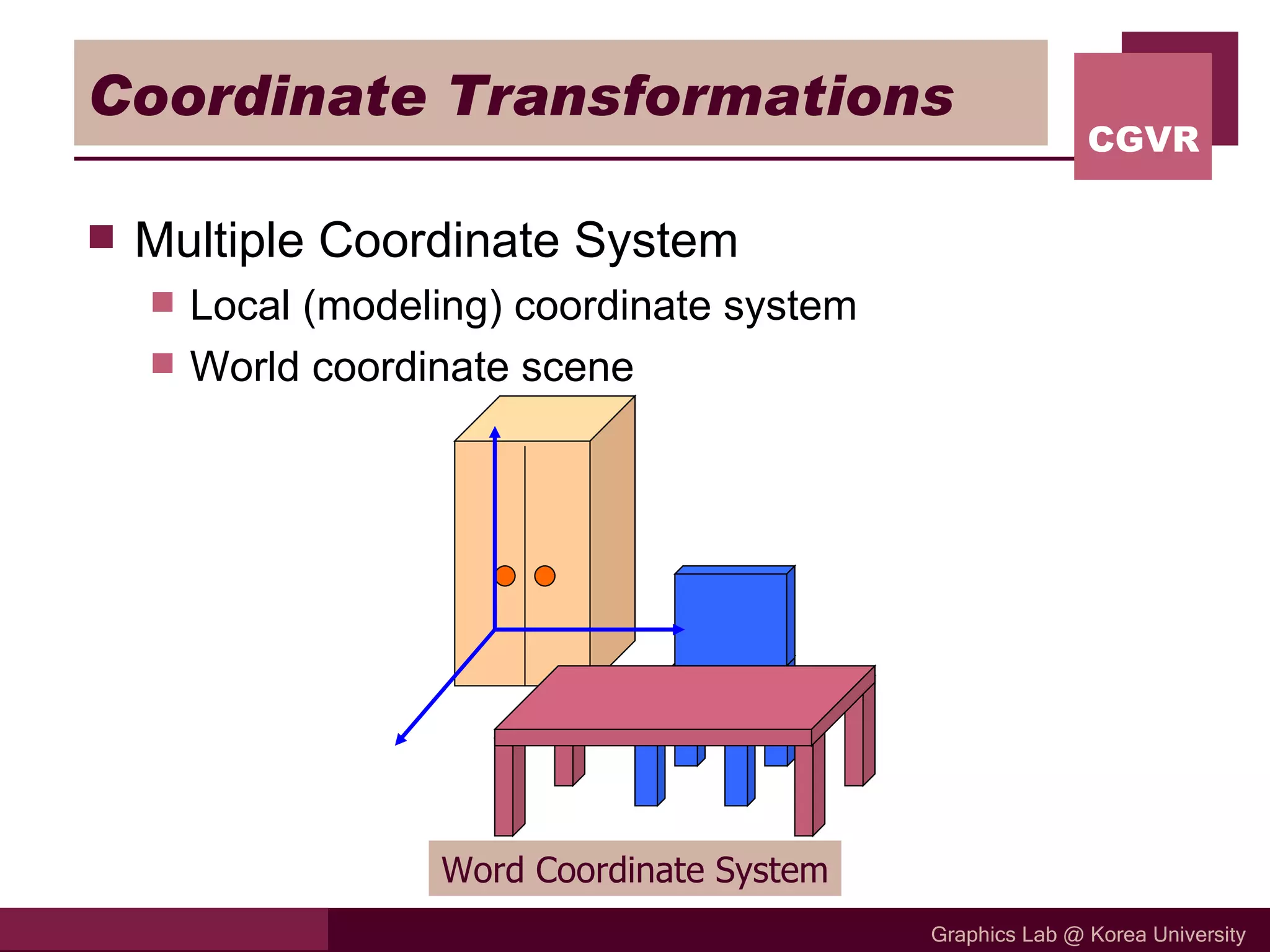
4) How reflections, shears, and different coordinate systems require coordinate transformations between systems.
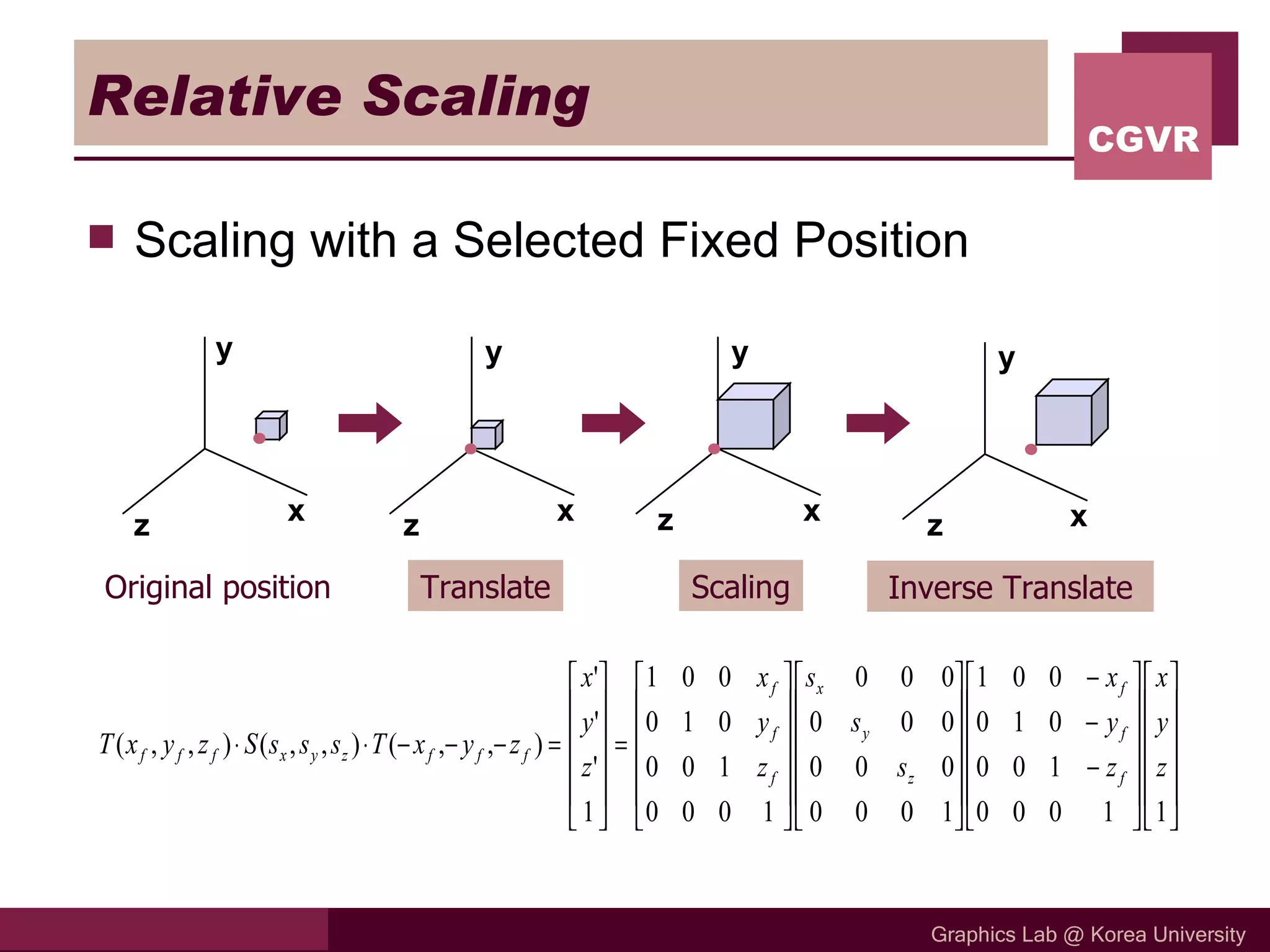
Relative Scaling Scalingwith a Selected Fixed Position x x x x z z z z y y y y Original position Translate Scaling Inverse Translate
7.
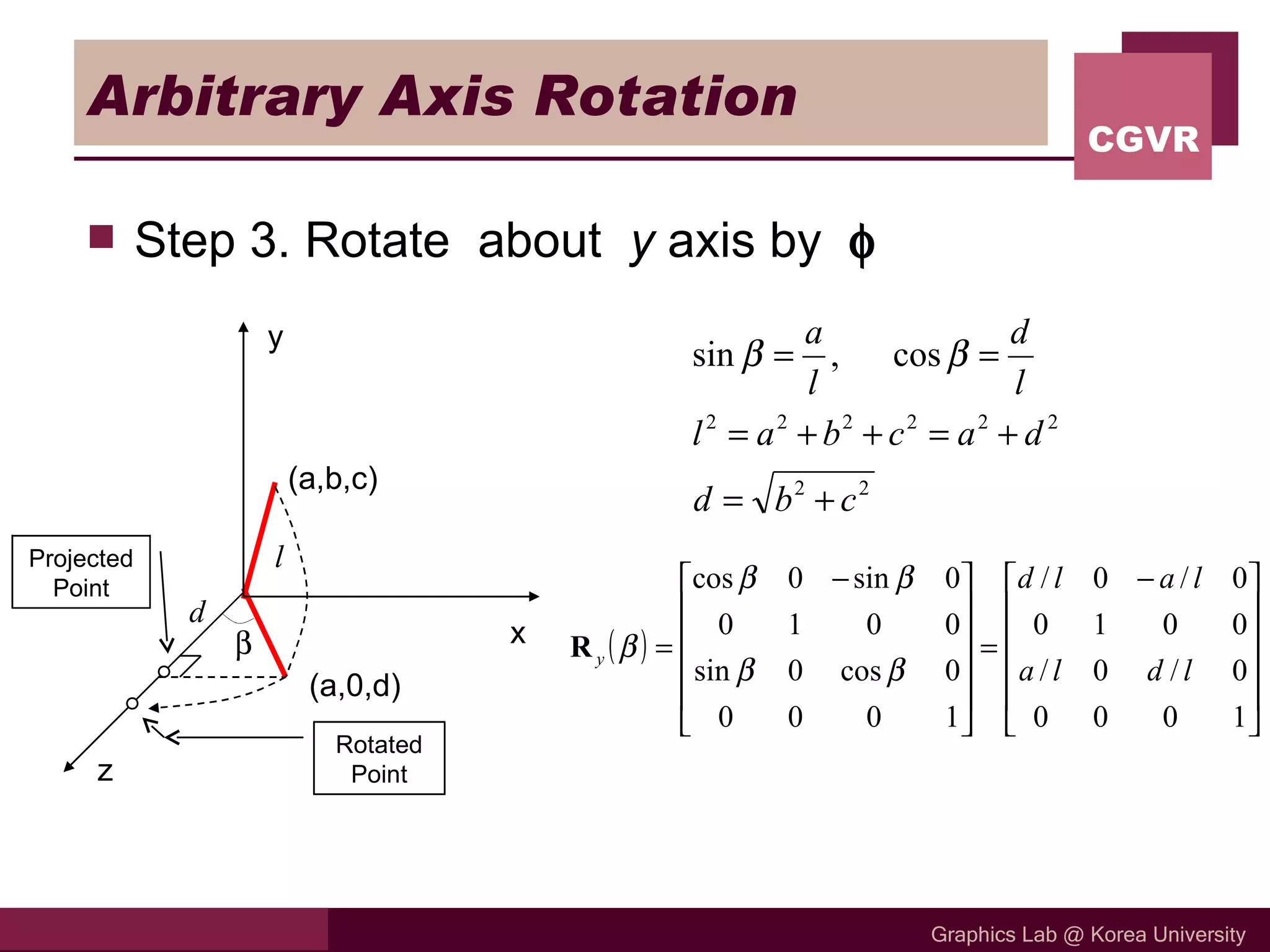
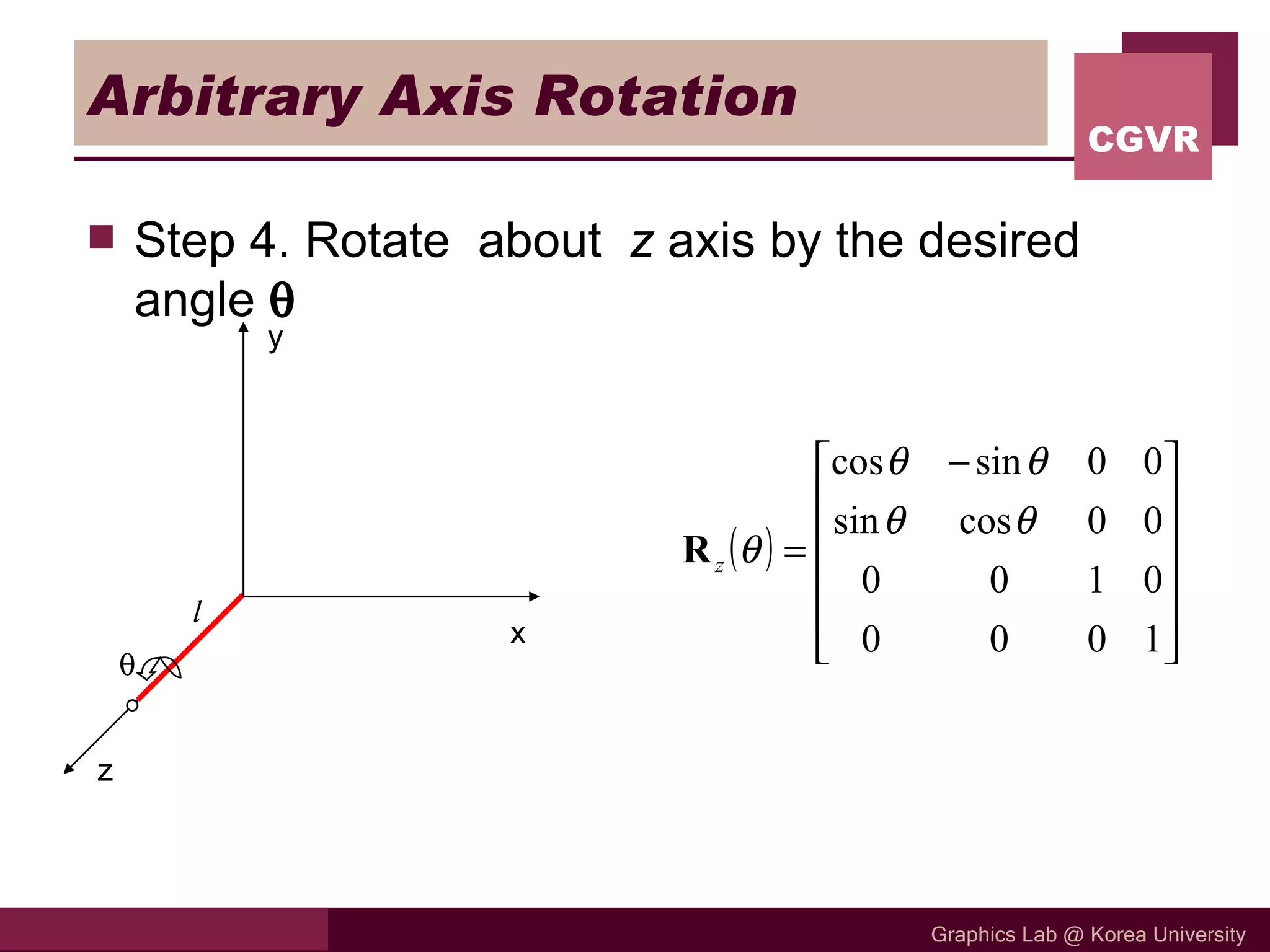
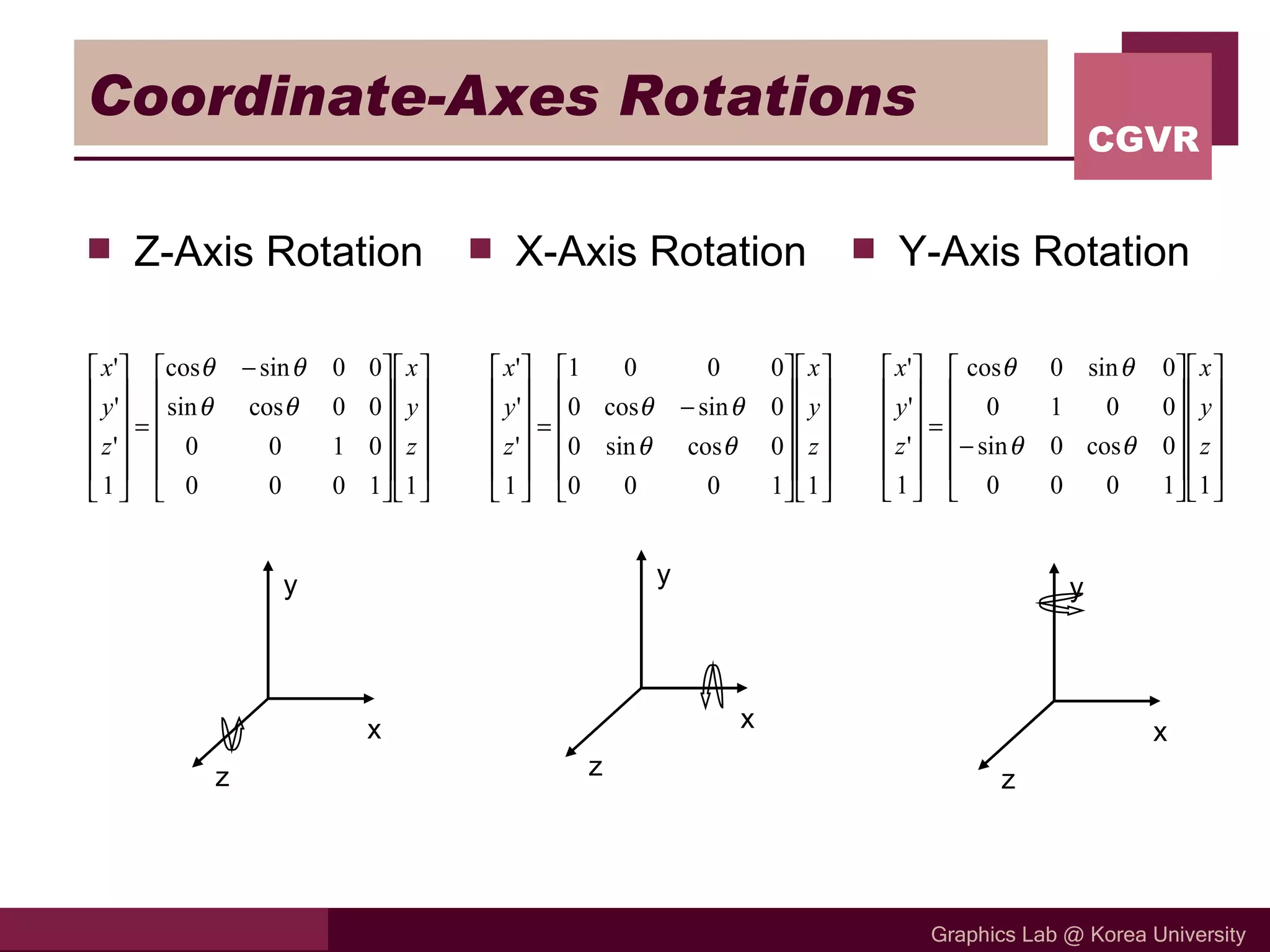
3D Rotation Coordinate-AxesRotations X-axis rotation Y-axis rotation Z-axis rotation General 3D Rotations Rotation about an axis that is parallel to one of the coordinate axes Rotation about an arbitrary axis
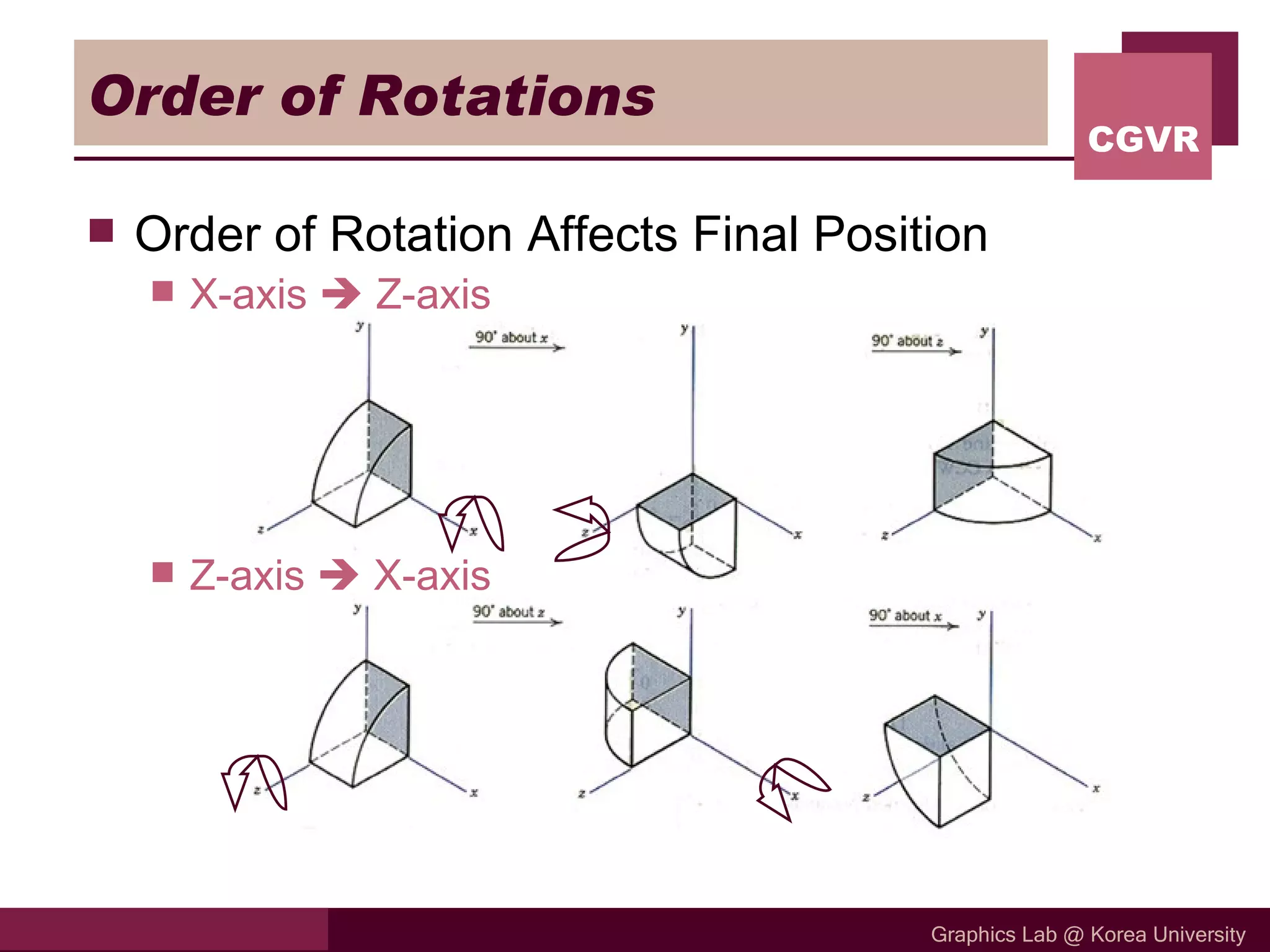
Order of RotationsOrder of Rotation Affects Final Position X-axis Z-axis Z-axis X-axis
10.
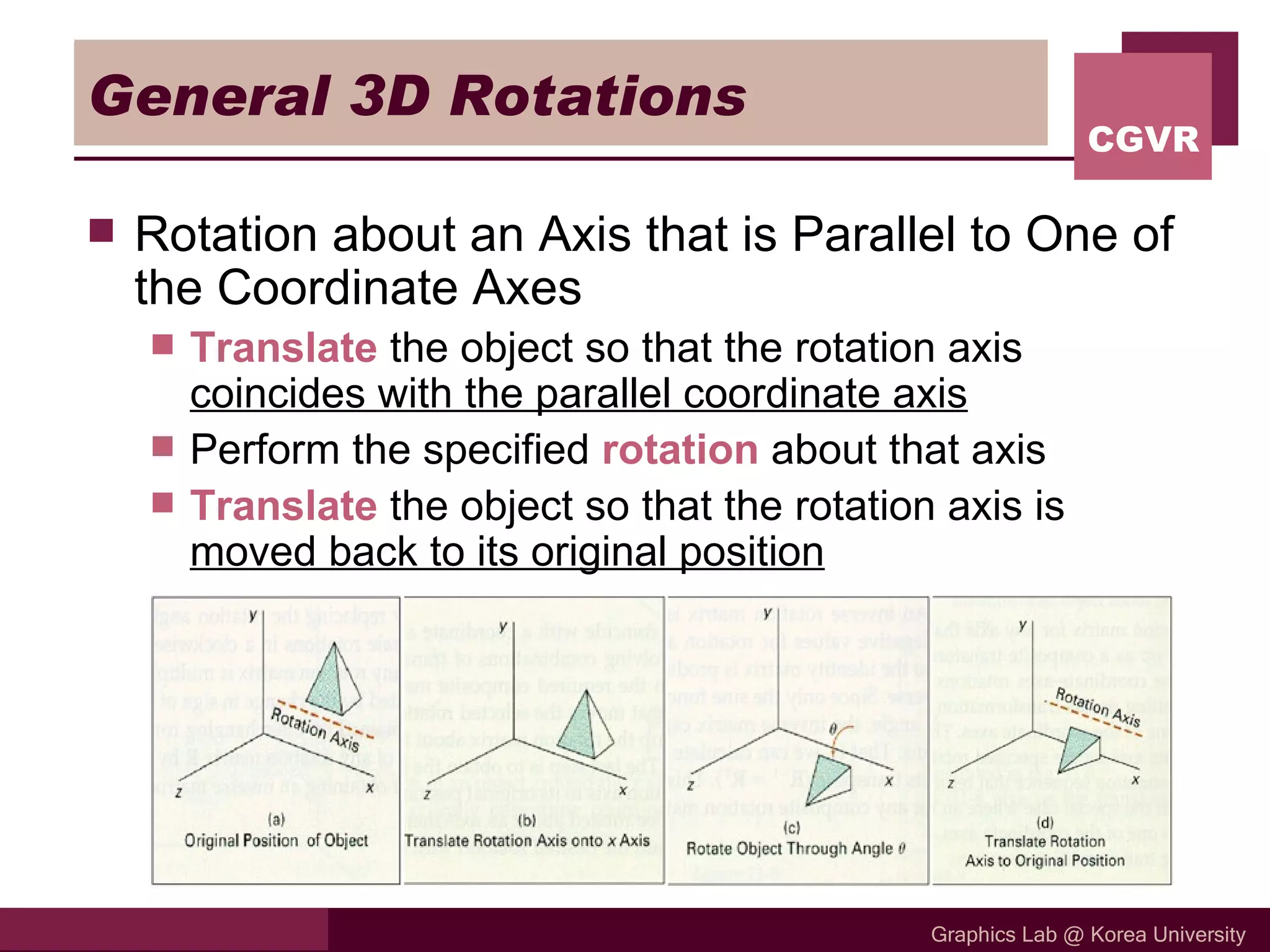
General 3D RotationsRotation about an Axis that is Parallel to One of the Coordinate Axes Translate the object so that the rotation axis coincides with the parallel coordinate axis Perform the specified rotation about that axis Translate the object so that the rotation axis is moved back to its original position
11.
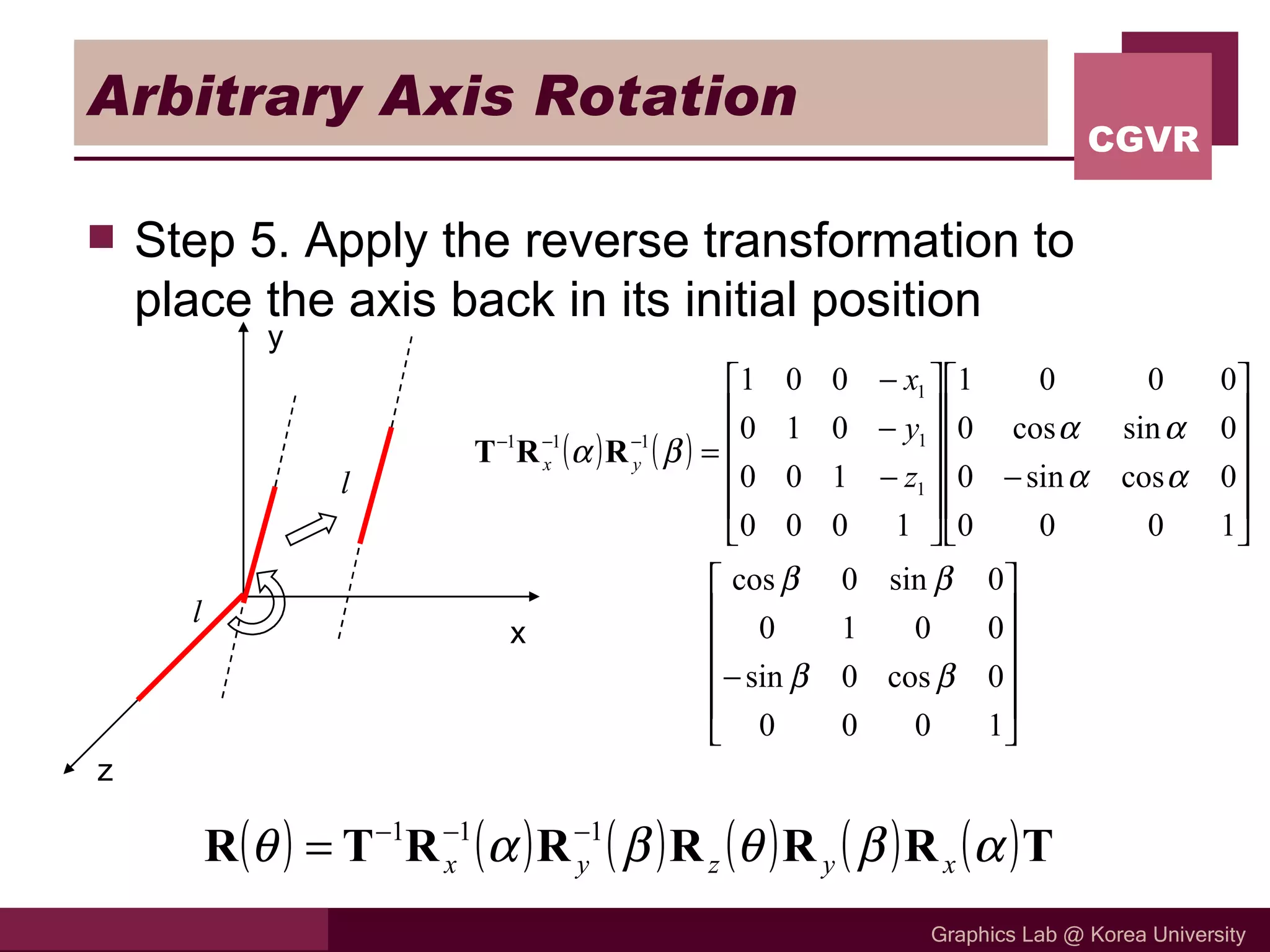
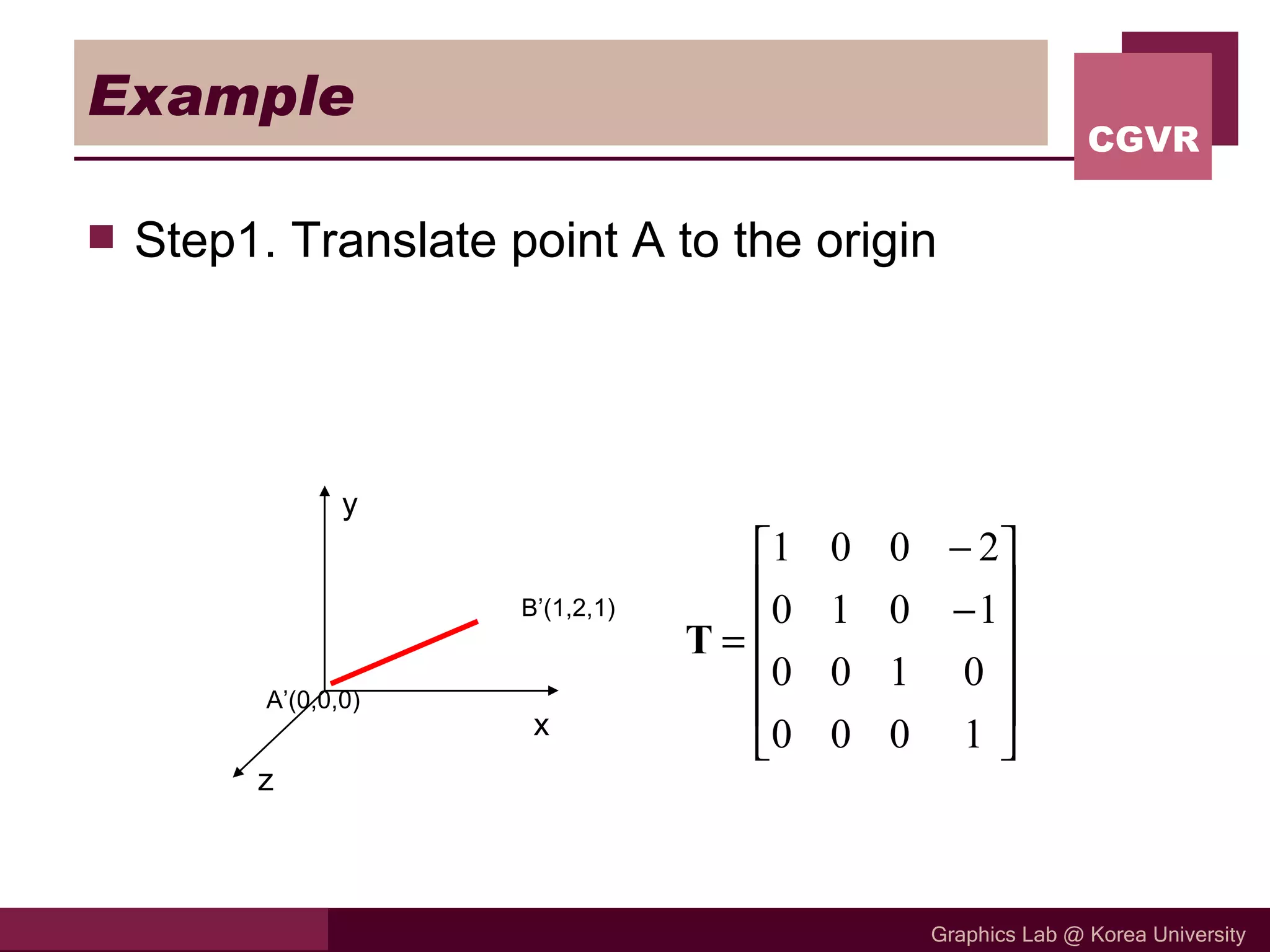
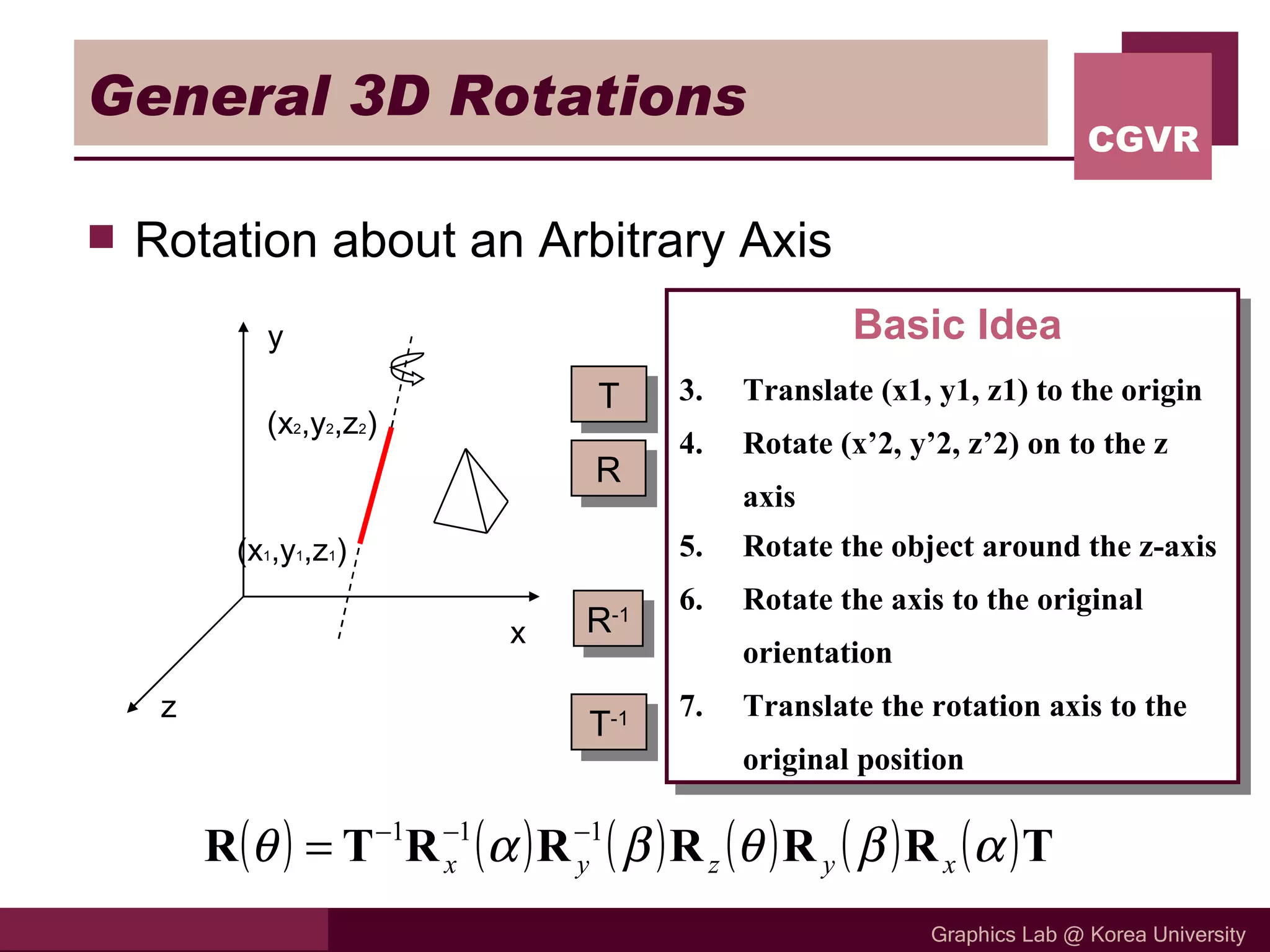
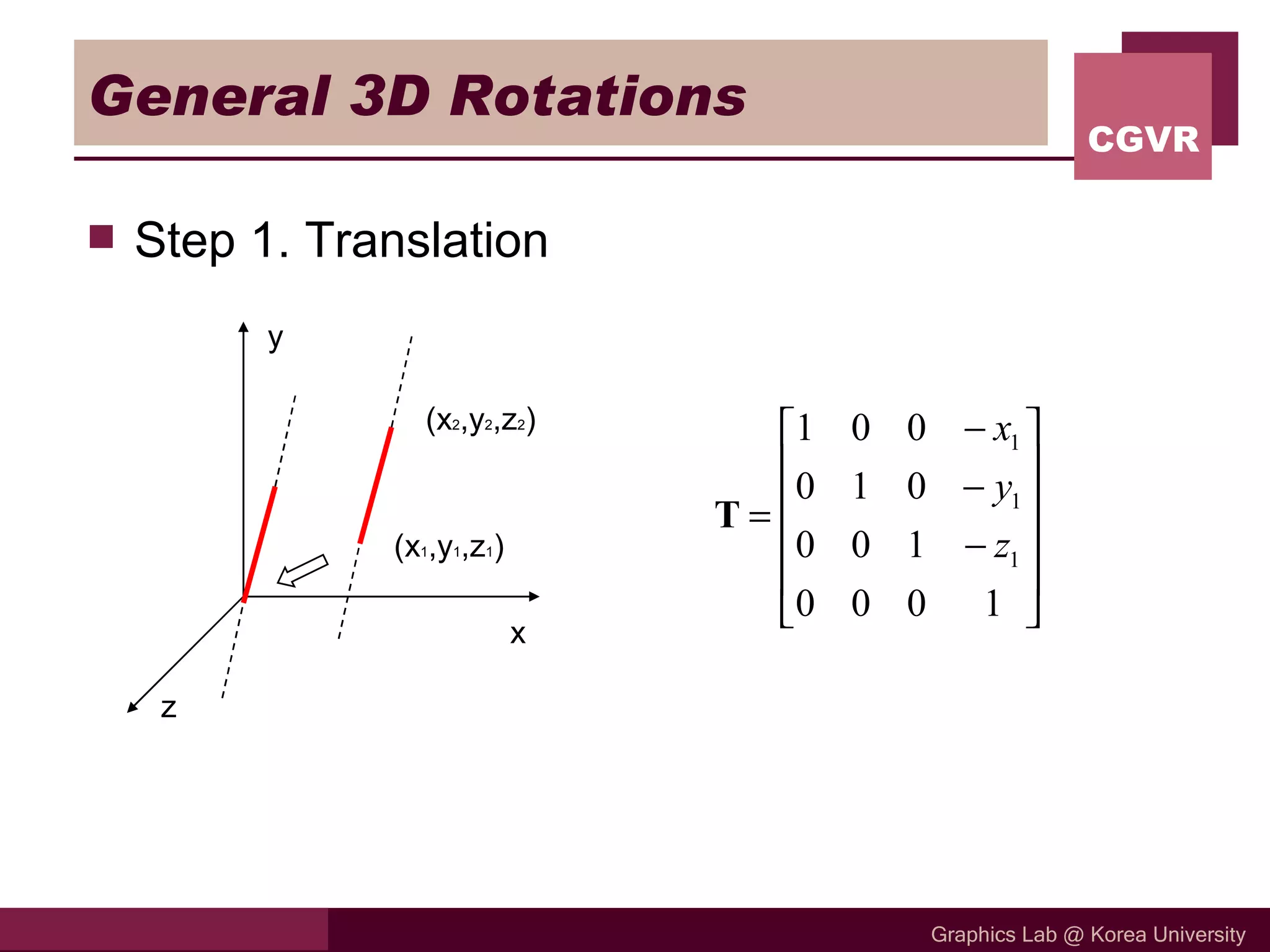
General 3D RotationsRotation about an Arbitrary Axis Basic Idea Translate (x1, y1, z1) to the origin Rotate (x’2, y’2, z’2) on to the z axis Rotate the object around the z-axis Rotate the axis to the original orientation Translate the rotation axis to the original position (x 2 ,y 2 ,z 2 ) (x 1 ,y 1 ,z 1 ) x z y R -1 T -1 R T
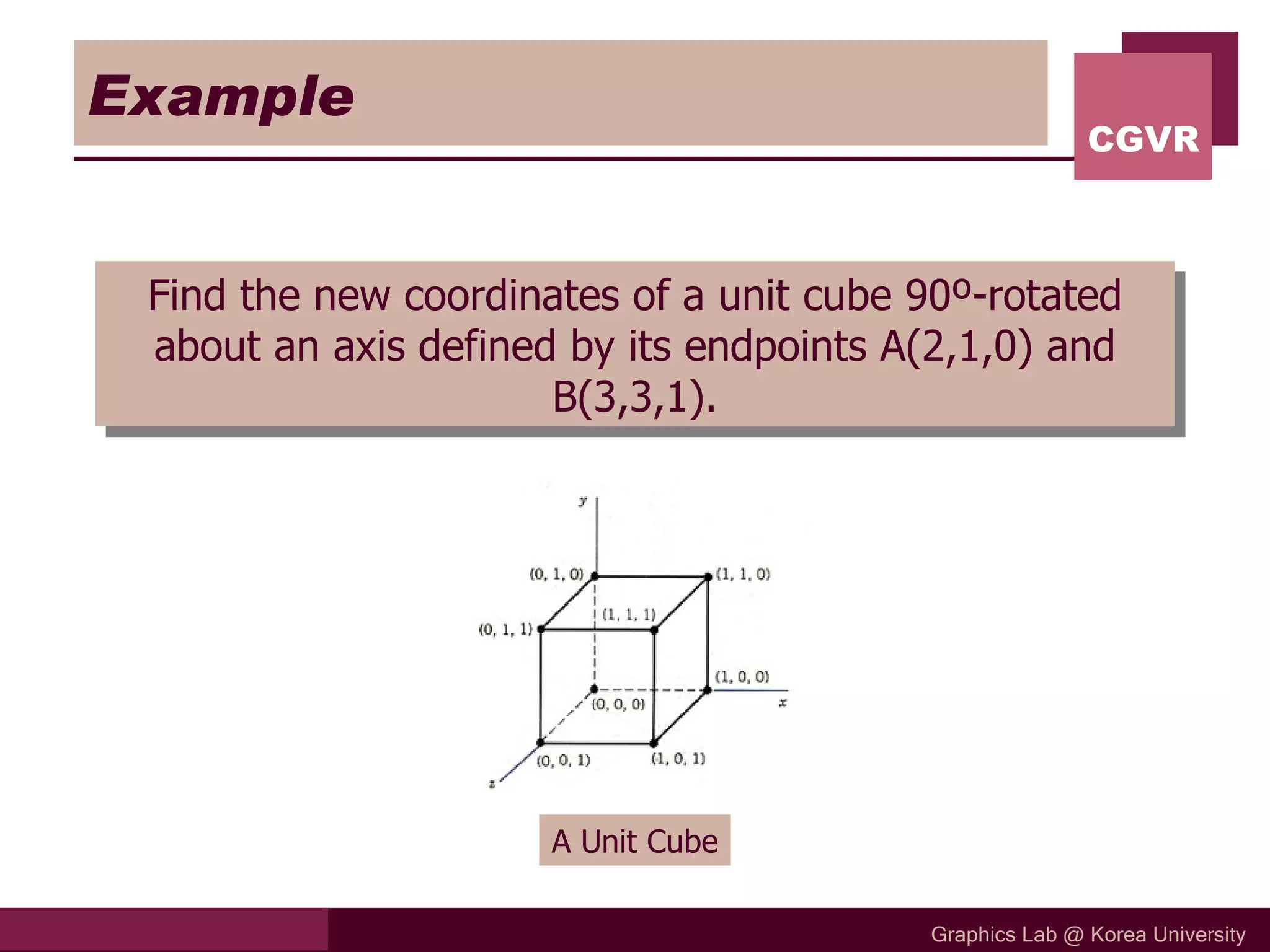
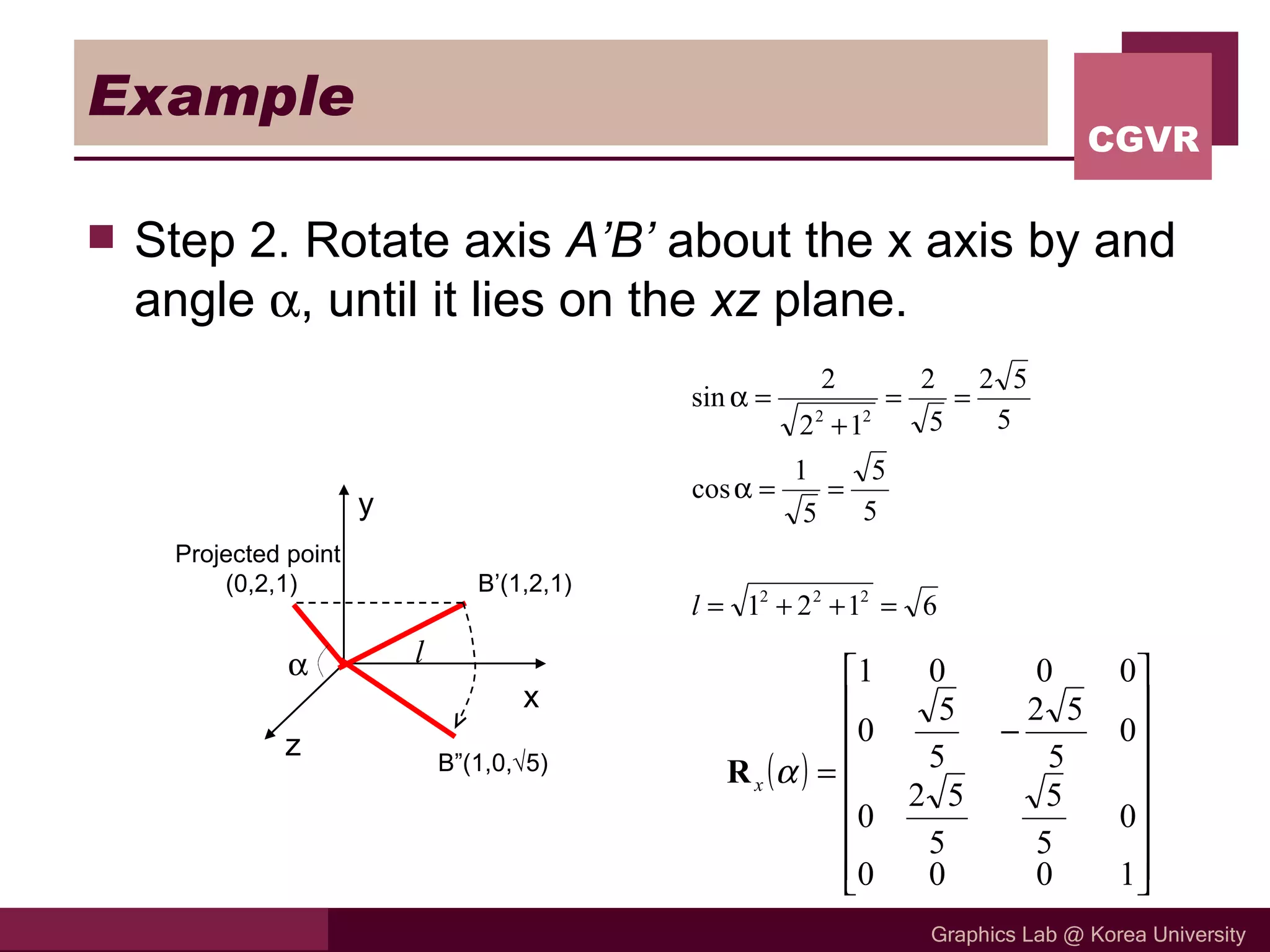
Example Step 2.Rotate axis A’B’ about the x axis by and angle , until it lies on the xz plane. x z y l B’(1,2,1) Projected point (0,2,1) B”(1,0, 5)
20.
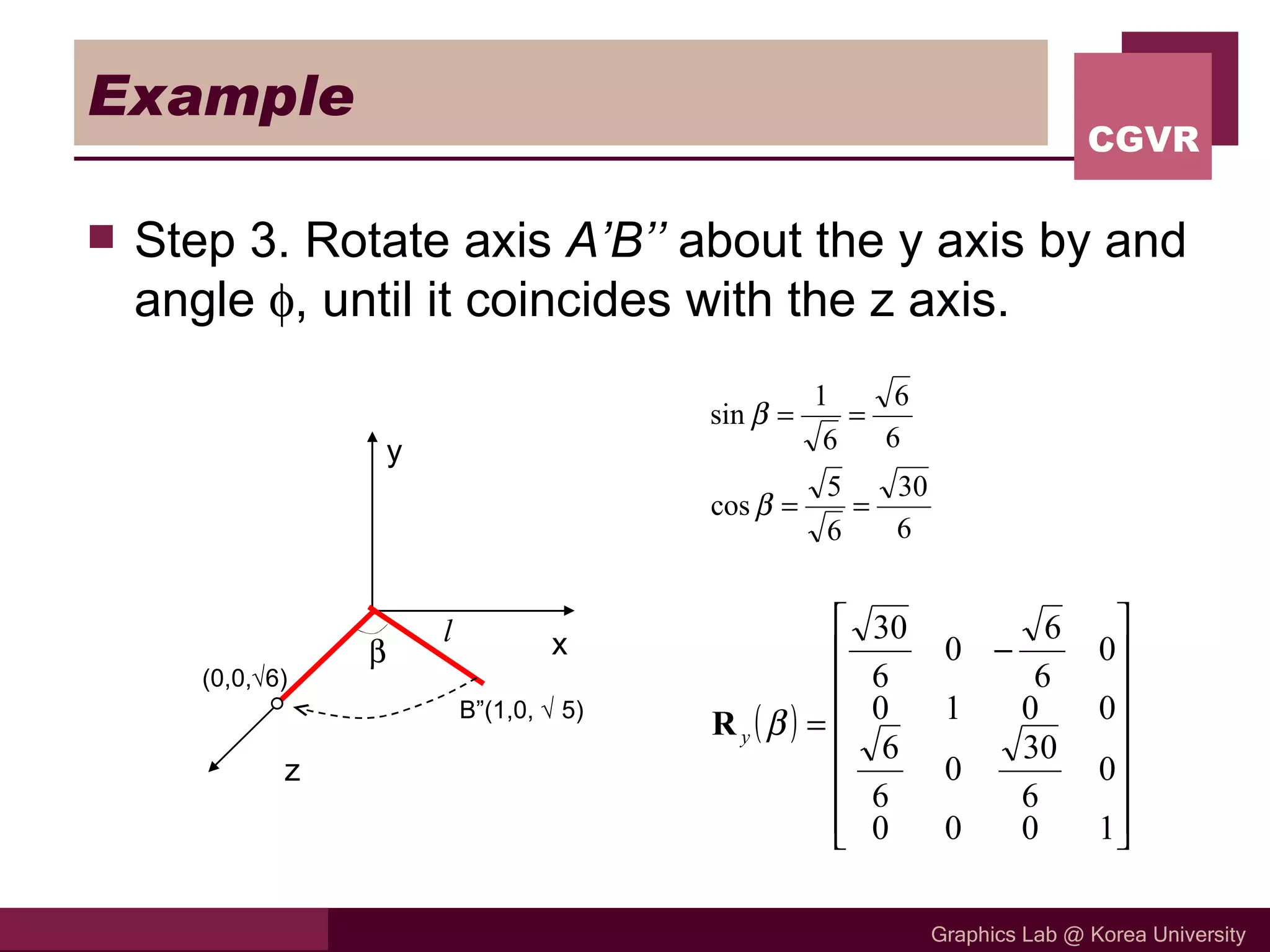
Example Step 3.Rotate axis A’B’’ about the y axis by and angle , until it coincides with the z axis. x z y l B”(1,0, 5) (0,0, 6)
21.
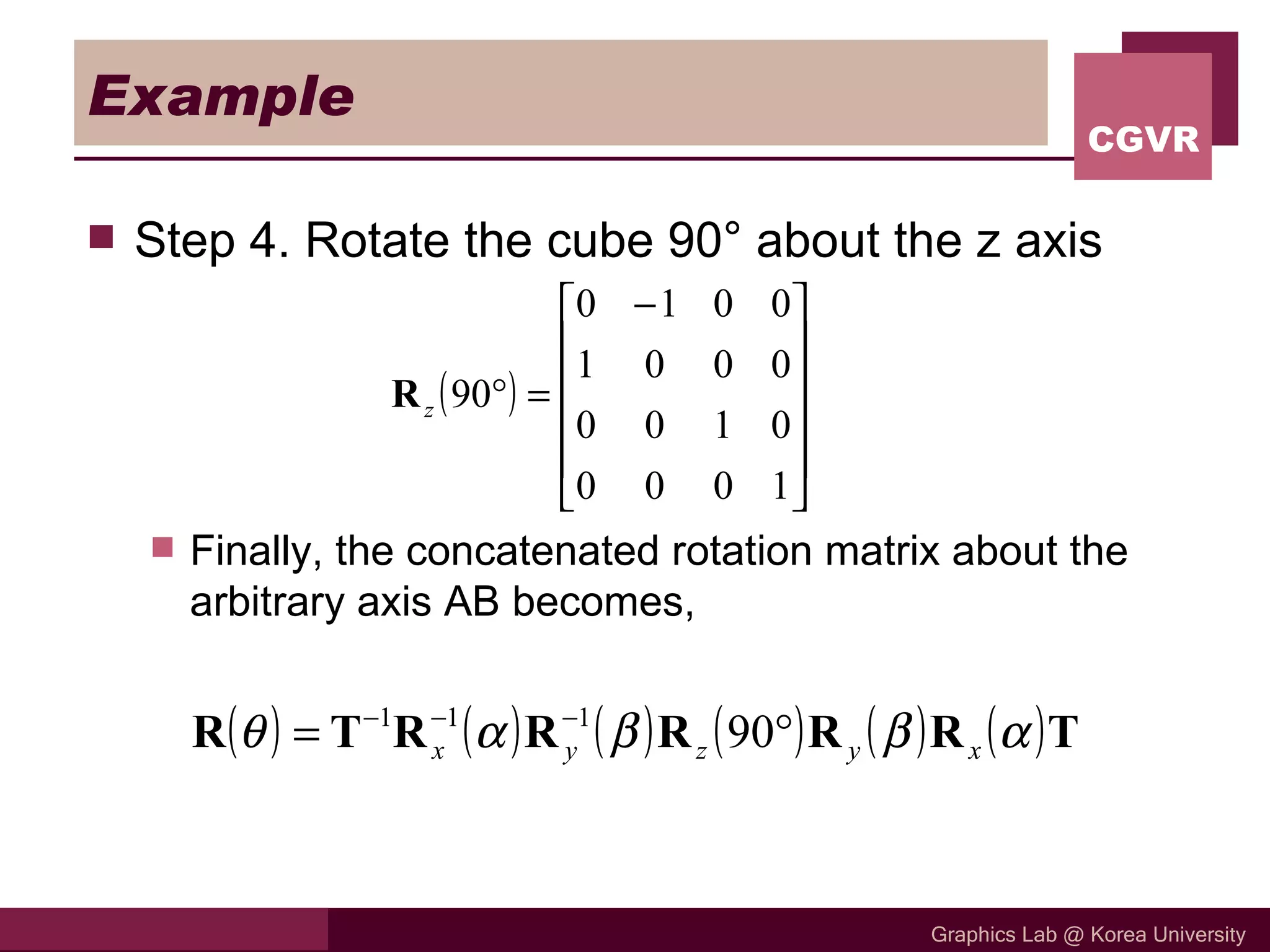
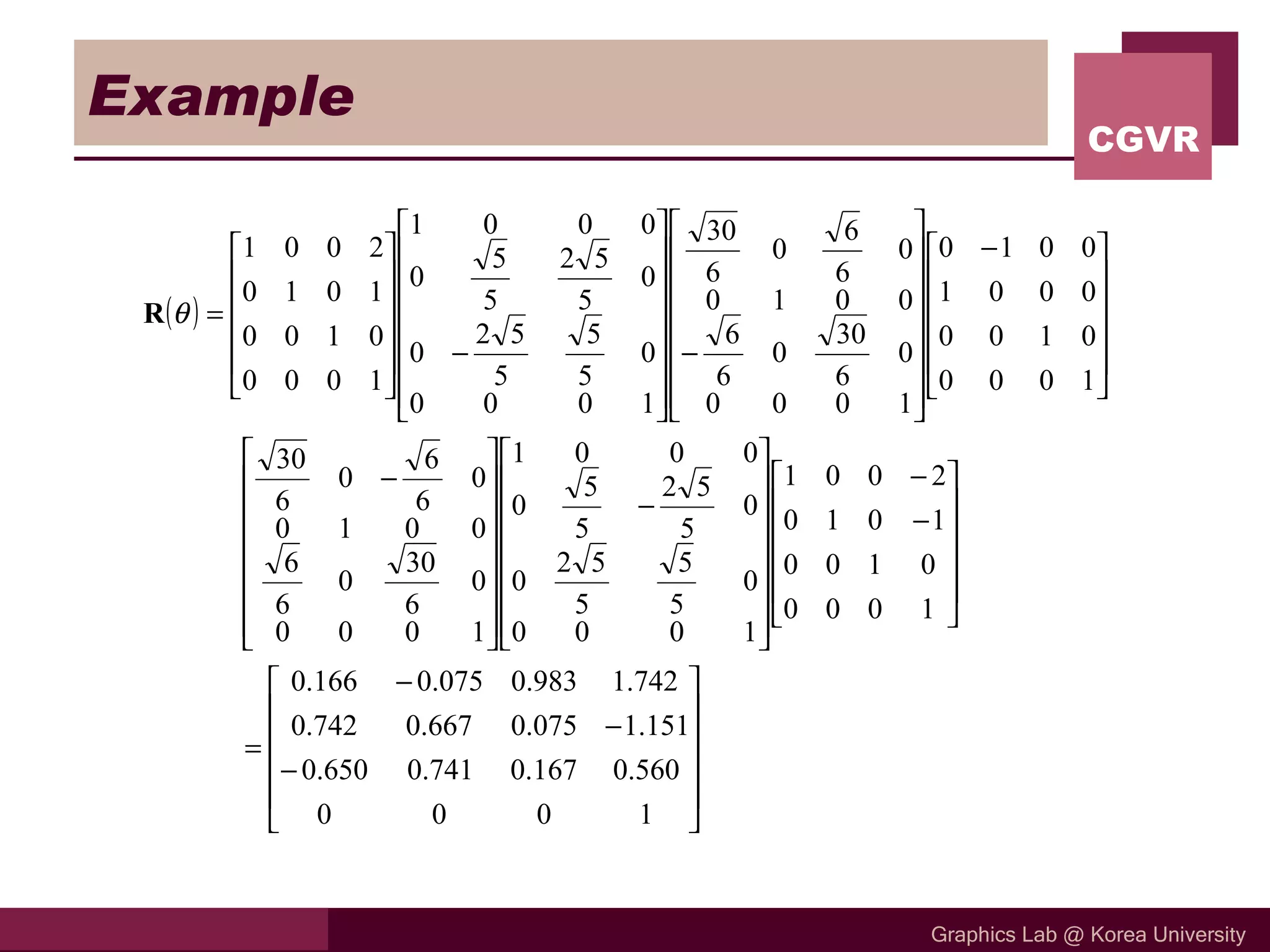
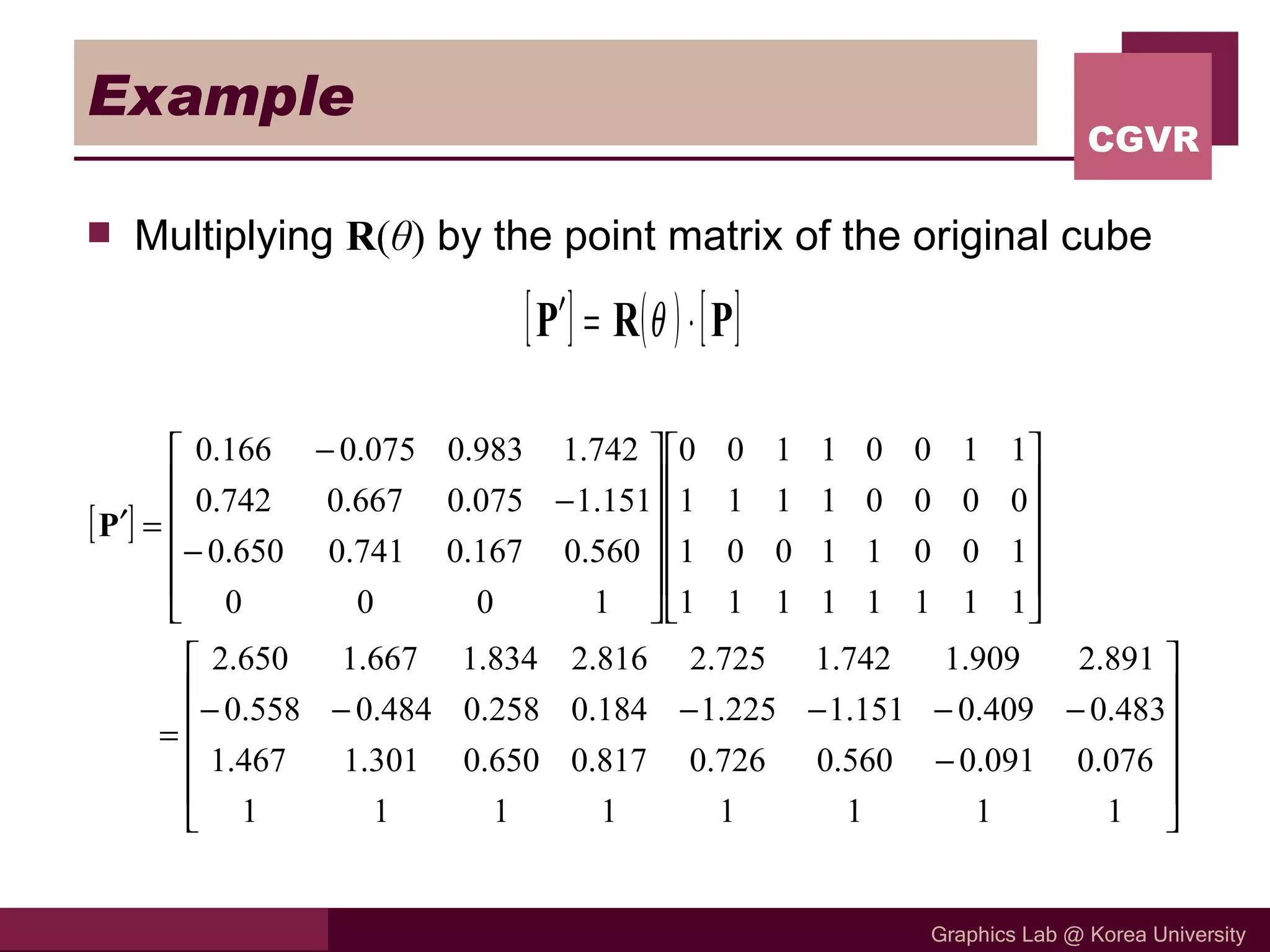
Example Step 4.Rotate the cube 90° about the z axis Finally, the concatenated rotation matrix about the arbitrary axis AB becomes,
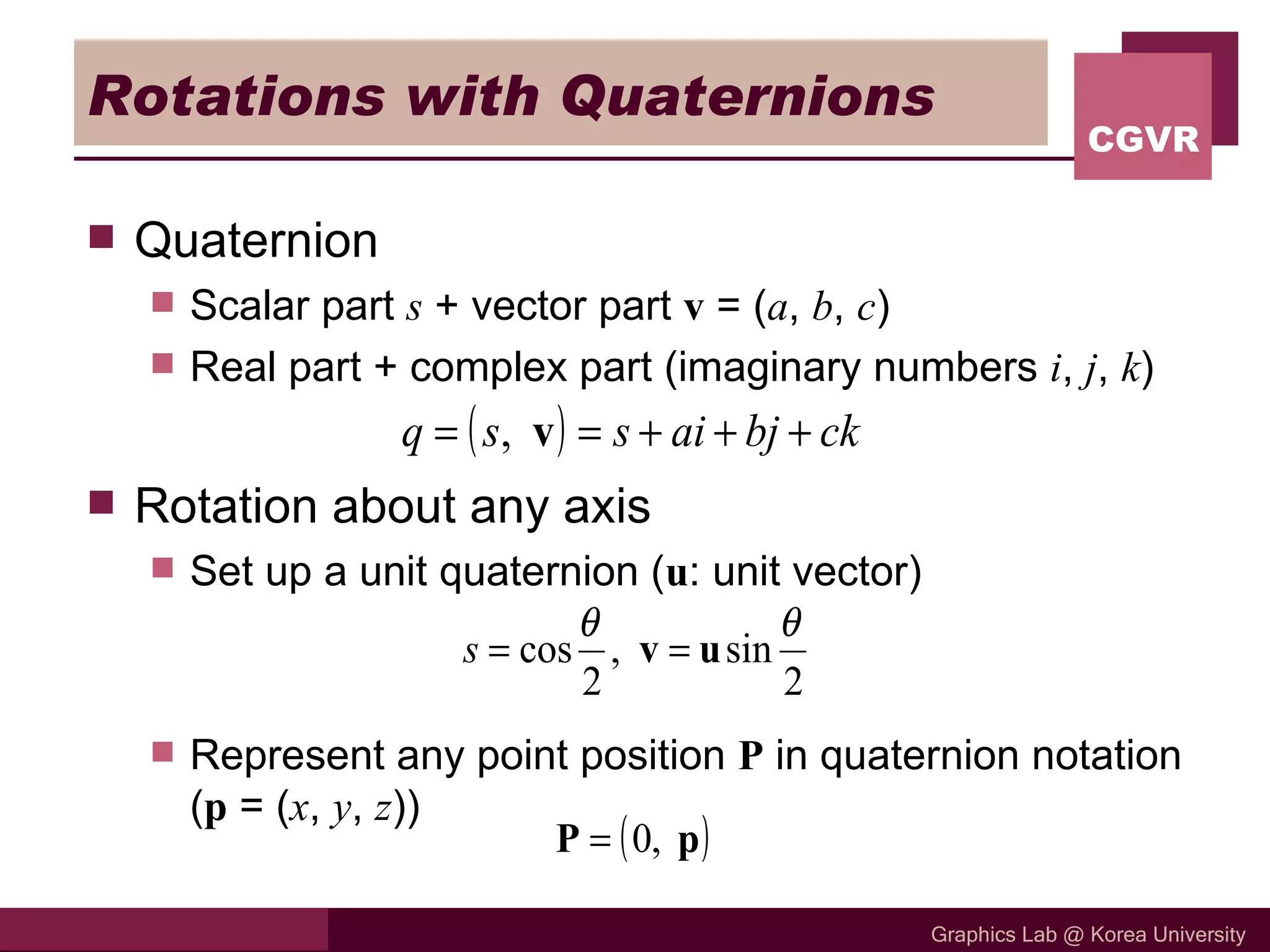
Rotations with QuaternionsQuaternion Scalar part s + vector part v = ( a , b , c ) Real part + complex part (imaginary numbers i , j , k ) Rotation about any axis Set up a unit quaternion ( u : unit vector) Represent any point position P in quaternion notation ( p = ( x , y , z ))
25.
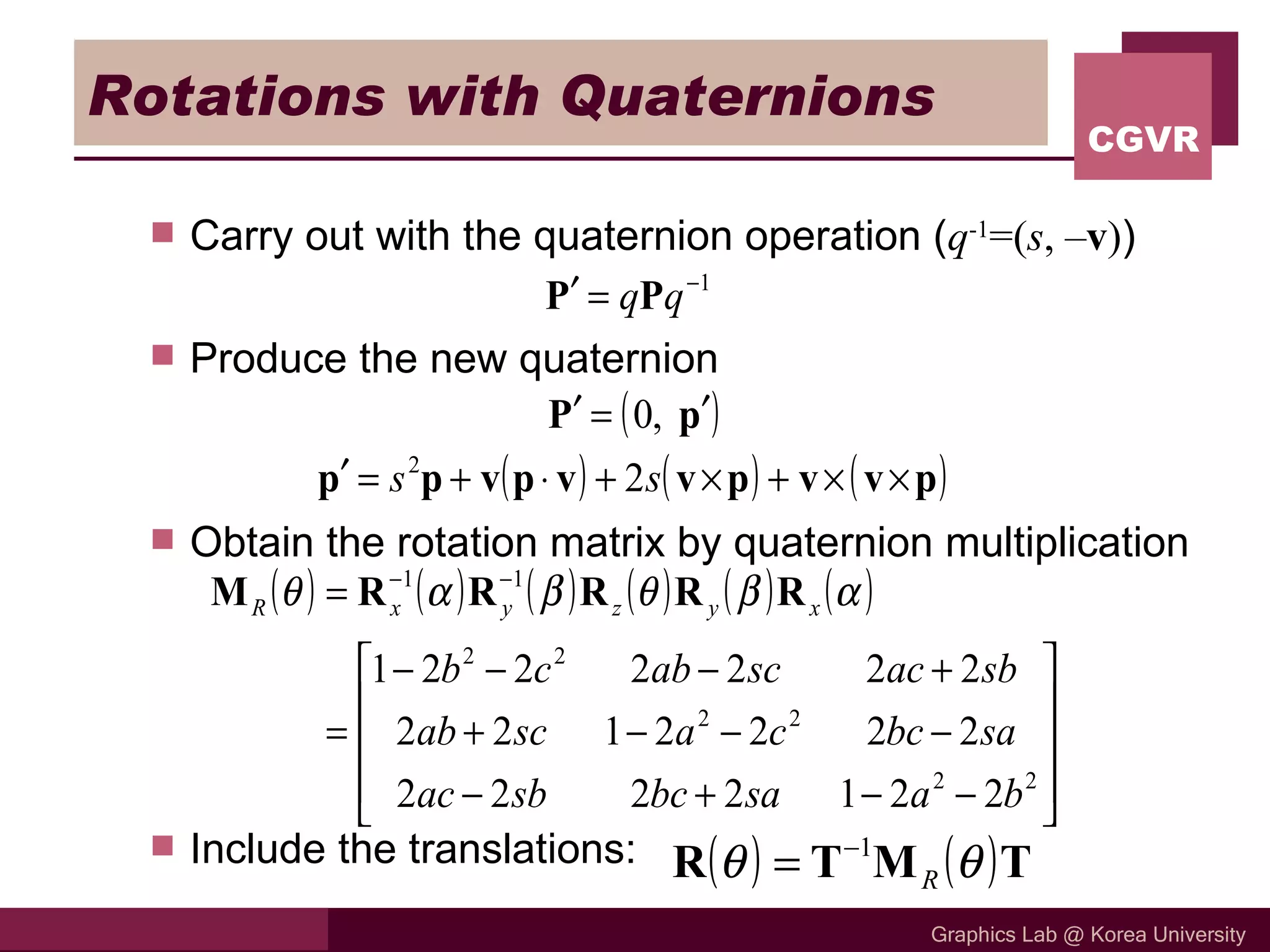
Rotations with QuaternionsCarry out with the quaternion operation ( q -1 =( s , – v ) ) Produce the new quaternion Obtain the rotation matrix by quaternion multiplication Include the translations:
26.
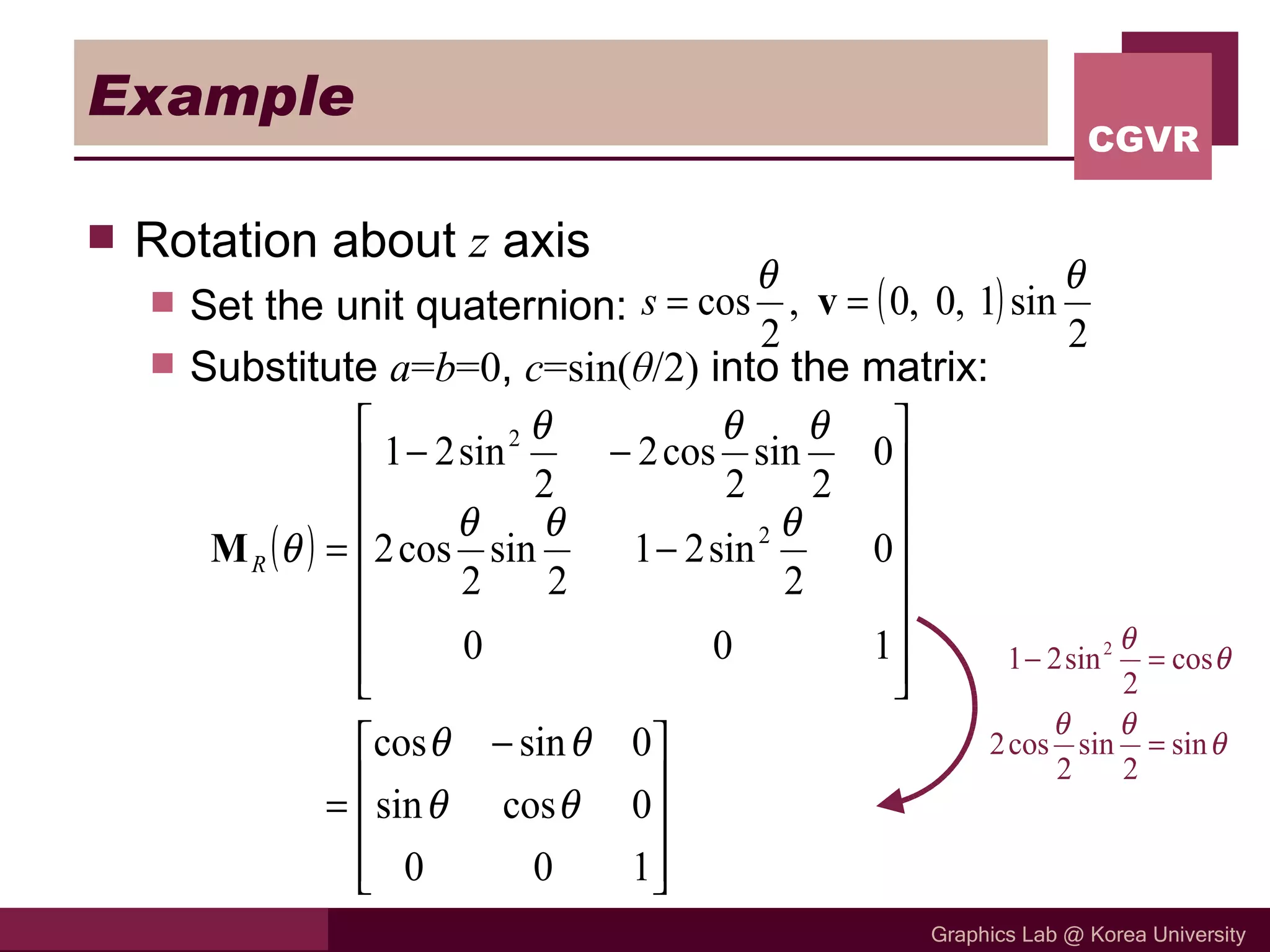
Example Rotation about z axis Set the unit quaternion: Substitute a = b =0 , c =sin( θ /2) into the matrix:
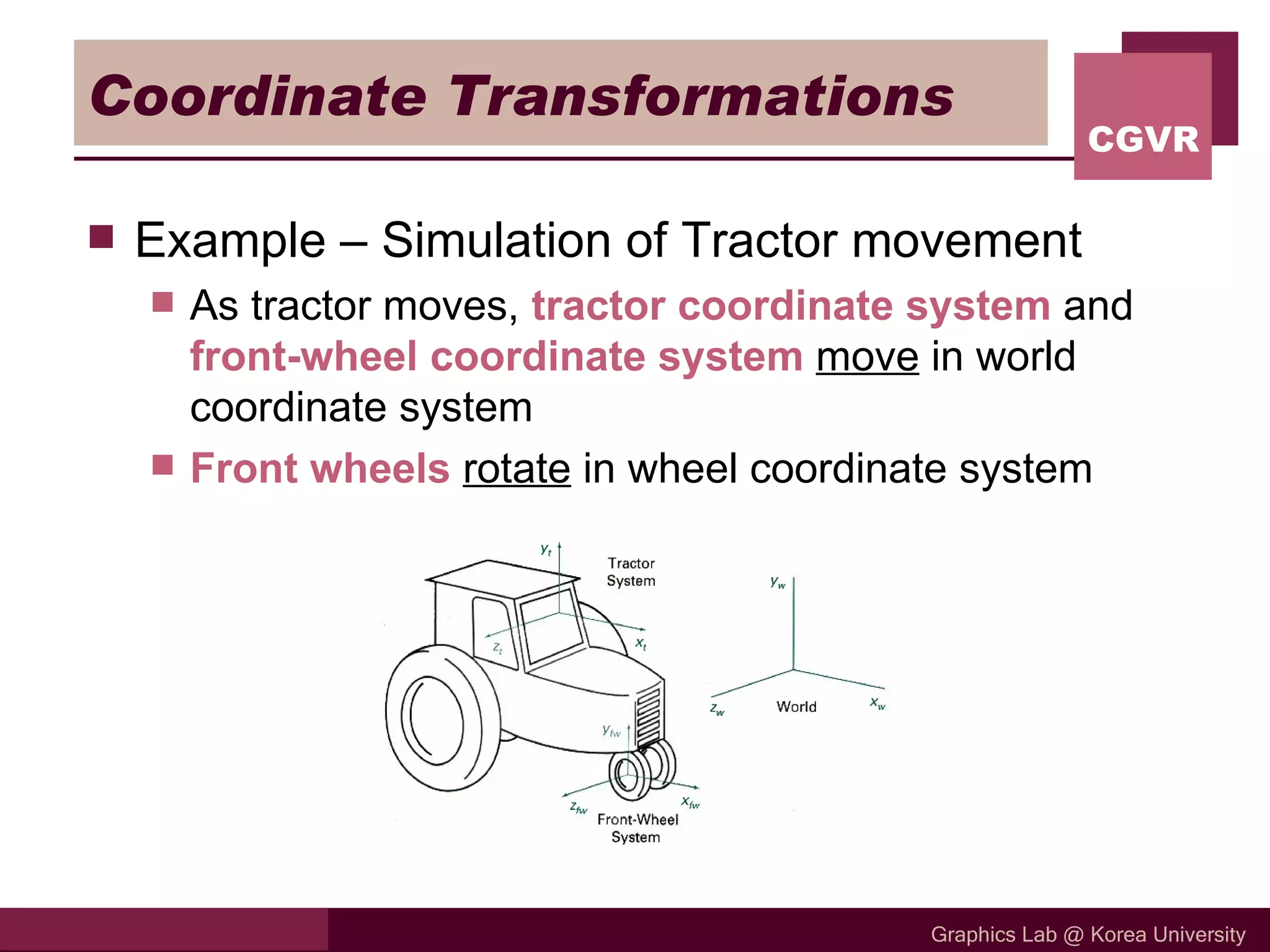
Coordinate Transformations Example– Simulation of Tractor movement As tractor moves, tractor coordinate system and front-wheel coordinate system move in world coordinate system Front wheels rotate in wheel coordinate system
31.
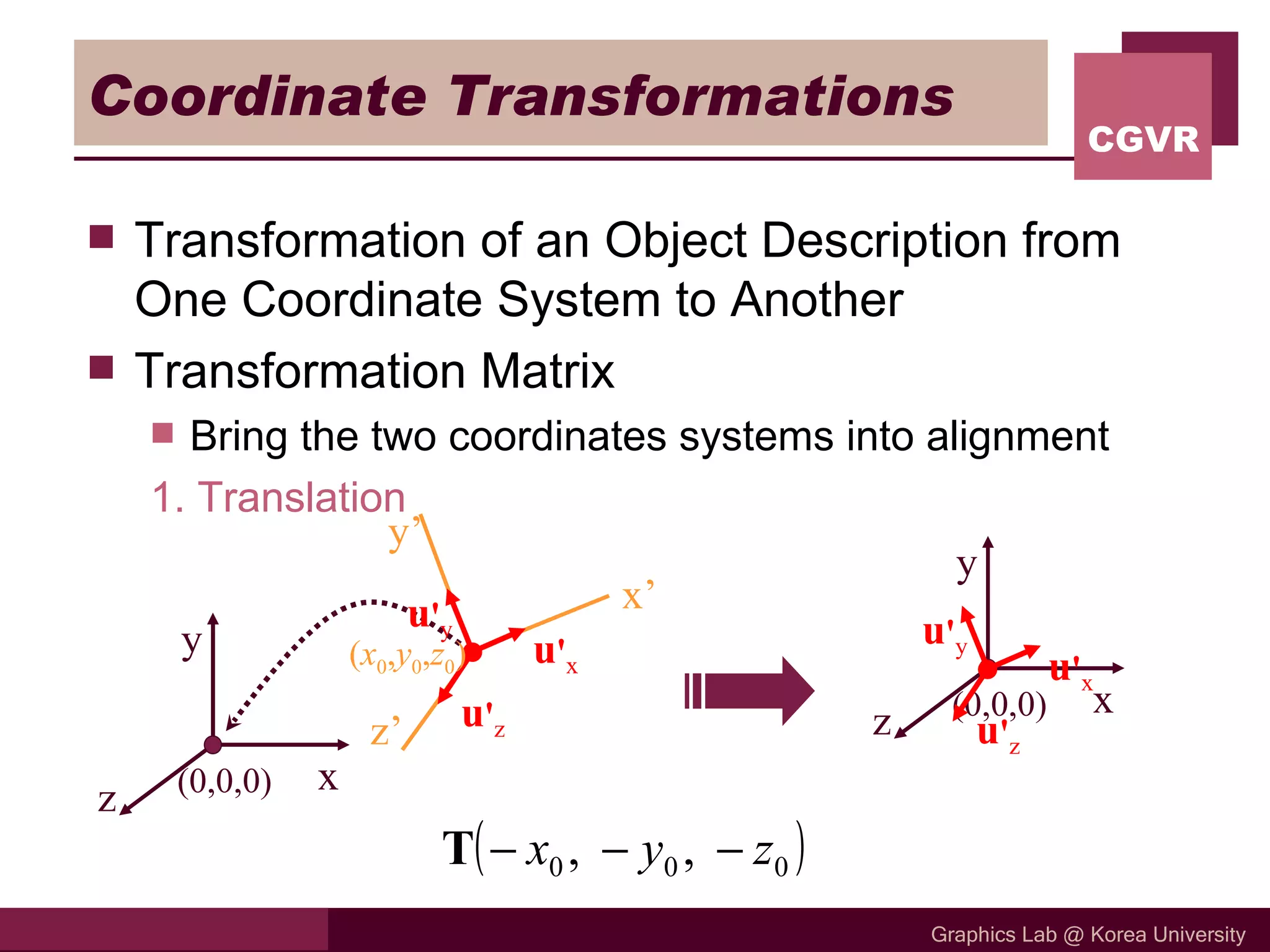
Coordinate Transformations Transformationof an Object Description from One Coordinate System to Another Transformation Matrix Bring the two coordinates systems into alignment 1. Translation u ' y u ' z u ' x x y z (0,0,0) y’ z’ x’ u ' y u ' z u ' x ( x 0 , y 0 , z 0 ) x y z (0,0,0)
32.
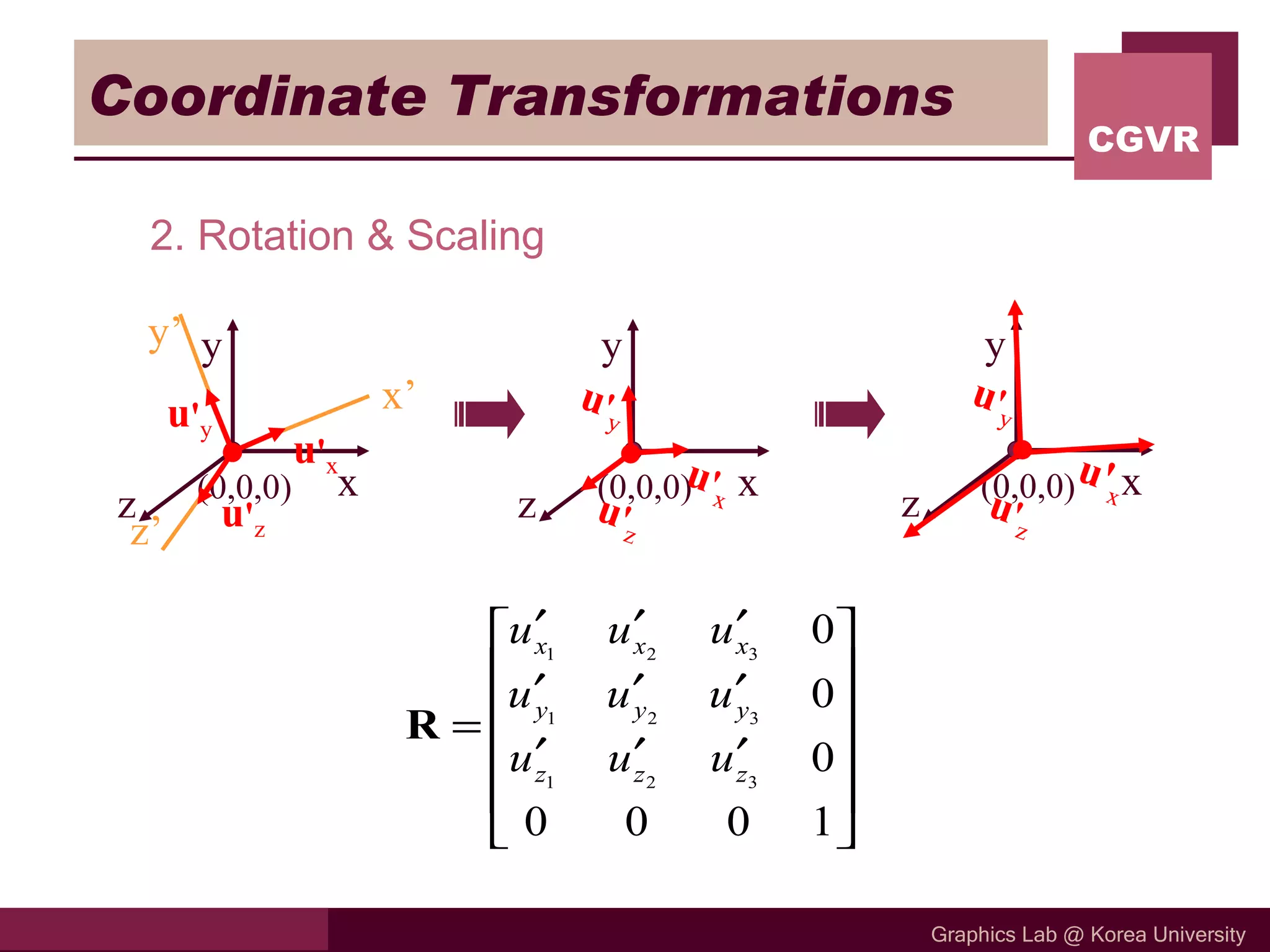
Coordinate Transformations 2.Rotation & Scaling y’ z’ x’ u ' y u ' z u ' x u ' y u ' z u ' x u ' y u ' z u ' x x y z (0,0,0) x y z (0,0,0) x y z (0,0,0)
![General 3D Rotations Step 2. Establish [ T R ] x x axis (a,b,c) (0,b,c) Projected Point Rotated Point x y z](https://image.slidesharecdn.com/09transformation3d-110318125344-phpapp01/75/transformation-3d-13-2048.jpg)