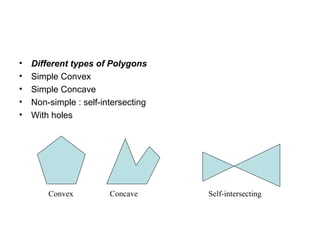
This document discusses various algorithms for polygon scan conversion and filling, including:
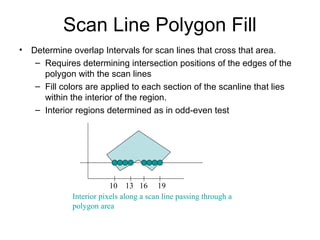
- The scan line polygon fill algorithm which determines pixel color by calculating polygon edge intersections with scan lines and using an odd-even rule.
- Methods for handling special cases like horizontal edges and vertex intersections.
- Using a sorted edge table and active edge list to incrementally calculate edge intersections across scan lines.
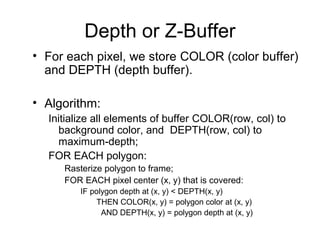
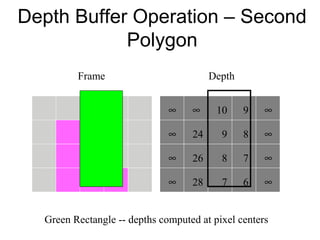
- Flood fill and depth/z-buffer algorithms for hidden surface removal when rendering overlapping polygons.