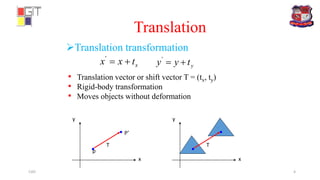
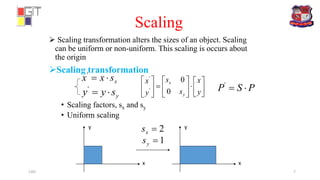
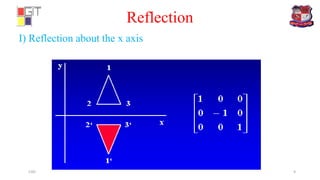
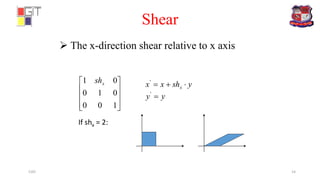
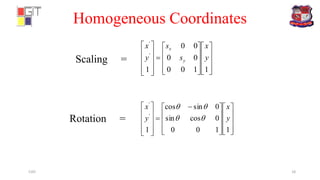
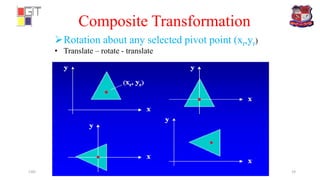
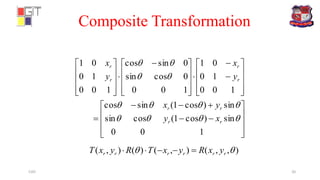
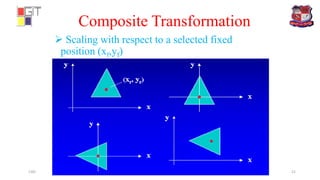
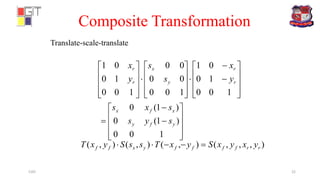
This document discusses various 2D geometric transformations including translation, rotation, scaling, reflection, and shear. It provides the mathematical formulas to perform each transformation using homogeneous coordinates and matrix representations. It also describes how to perform a composite transformation using multiple basic transformations sequentially, such as translating, rotating and translating again. Finally, it includes an example of rotating a triangle about two different points to demonstrate composite transformations.

![Rotation
x
y
P(x,y)
P’ (x’,y’)
r𝜽
Consider rotation of a point about origin
Let point P(x y) be rotated by an angle𝜽 about
origin O
Rotation transformation
P = [x y]
= [rcos∅ rsin∅] ……(i)
Let the rotated point represented as:
P’ = [x’ y’]
= [rcos(𝜽+∅) rsin(𝜽+∅)]
= [rcos𝜽cos∅-rsin𝜽sin∅ rcos𝜽sin∅+rsin𝜽cos∅]
O
∅
CAD 5](https://image.slidesharecdn.com/twodimensionalgeometrictransformation-170303061543/85/Two-dimensional-geometric-transformation-5-320.jpg)
![Putting the value from equation (i)
= [x cos𝜽-ysin𝜽 xsin𝜽+ycos𝜽]
This can also represented as,
= [x y] [
𝑐𝑜𝑠𝜽 𝑠𝑖𝑛𝜽
−𝑠𝑖𝑛𝜽 𝑐𝑜𝑠𝜽
P’ = P . R
R =
𝑐𝑜𝑠𝜽 𝑠𝑖𝑛𝜽
−𝑠𝑖𝑛𝜽 𝑐𝑜𝑠𝜽
……….. (anticlockwise rotation)
R’=
𝑐𝑜𝑠𝜽 −𝑠𝑖𝑛𝜽
𝑠𝑖𝑛𝜽 𝑐𝑜𝑠𝜽
…………(clockwise rotation)
Rotation
CAD 6](https://image.slidesharecdn.com/twodimensionalgeometrictransformation-170303061543/85/Two-dimensional-geometric-transformation-6-320.jpg)
![Example:- Perform a 45° rotation of a triangle A(0,0), B(1,1), C(5,3),
(i) about the origin and
(ii) about the point P(-1,-1)
Solution:-
(i) [T] = [A B C] [R]
=
0 0 1
1 1 1
5 2 1
.
𝑐𝑜𝑠𝜃 𝑠𝑖𝑛𝜃 0
−𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃 0
0 0 1
When, θ = 45°
[T] =
0 0 1
1 1 1
5 2 1
.
0.707 0.707 0
−0.707 0.707 0
0 0 1
=
0 0 1
0 1.414 1
2.121 4.949 1
So A’ (0,0), B’ (0,1.414), C’ (2.121,4.949)
CAD 23](https://image.slidesharecdn.com/twodimensionalgeometrictransformation-170303061543/85/Two-dimensional-geometric-transformation-23-320.jpg)
![(ii) [T] = [A B C] [Translation] [Rotation] [Inverse translation]
[T] = [A B C] [T] [R] [𝑇−1
]
=
0 0 1
1 1 1
5 2 1
.
1 0 0
0 1 0
1 1 1
.
𝑐𝑜𝑠45° 𝑠𝑖𝑛45° 0
−𝑠𝑖𝑛45° 𝑐𝑜𝑠45° 0
0 0 1
.
1 0 0
0 1 0
−1 −1 1
=
1 1 1
2 2 1
6 3 1
.
0.707 0.707 0
−0.707 0.707 0
0 0 1
.
1 0 0
0 1 0
−1 −1 1
=
0 1.414 1
0 2.828 1
2.121 6.363 1
.
1 0 0
0 1 0
−1 −1 1
=
−1 0.414 1
−1 1.828 1
1.121 5.363 1
A” (-1, 0.414), B” (-1, 1.828), C” (1.121, 5.363)CAD 24](https://image.slidesharecdn.com/twodimensionalgeometrictransformation-170303061543/85/Two-dimensional-geometric-transformation-24-320.jpg)