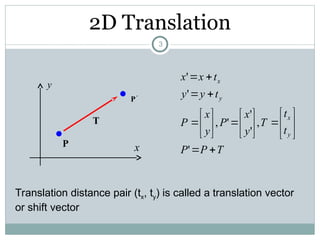
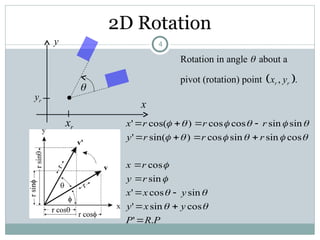
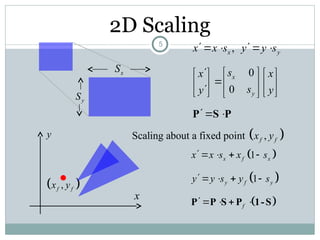
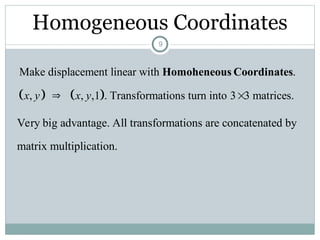
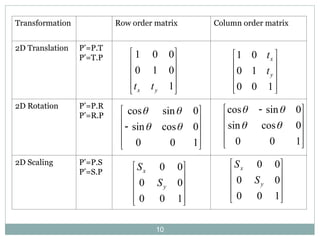
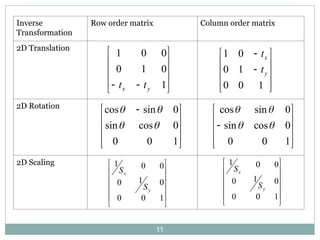
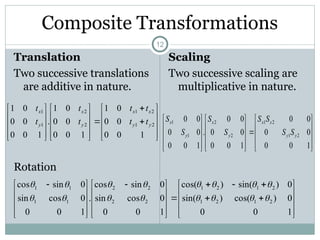
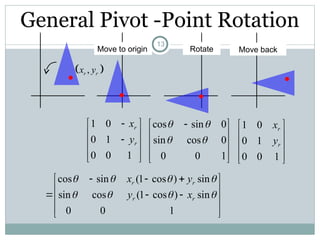
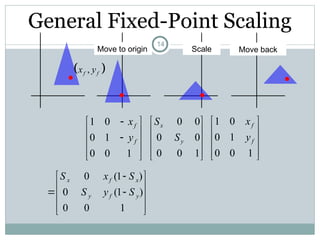
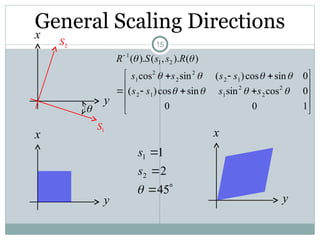
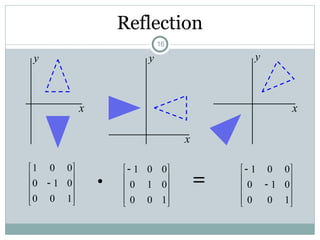
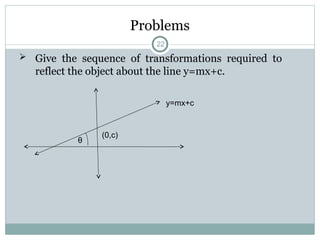
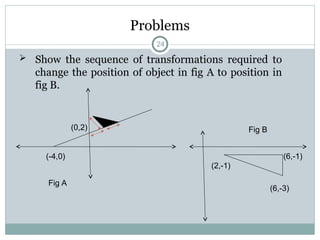
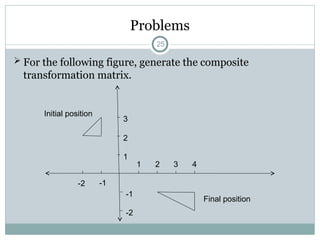
The document discusses two-dimensional geometric transformations, including translation, rotation, scaling, and shear. It explains the use of homogeneous coordinates for efficient transformations and the mathematical representations for each type. The text also covers composite transformations and practical problems related to applying these concepts.