Download as PDF, PPTX
![Mechanical Engineering Department – School Of Engineering
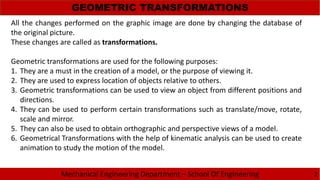
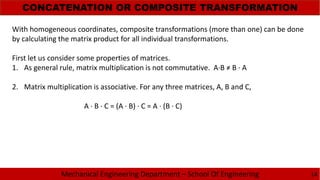
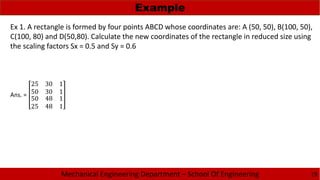
FORMULATION
3
P2(x2,y2)
P1(x1,y1)
Y
X
X2
X1
Y2
Y1
A point represented by a 1 × 2 matrix
P1 = [x1,y1]
Similarly, a line can be represented as :
L =
1
2
=
1 1
2 2
Line represented after transformation
L’ = L [TM]
Where, [TM] = Transformation Matrix
0](https://image.slidesharecdn.com/2-150213224833-conversion-gate01/85/2-1-fundamental-of-computer-graphics-3-320.jpg)
![Mechanical Engineering Department – School Of Engineering
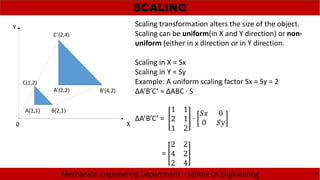
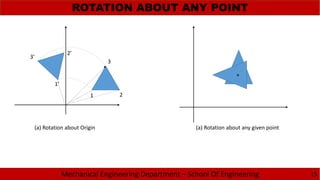
TRANSLATION
4
(x1, y1)
(x2, y2)
(x1’, y1’)
(x2’, y2’)
Translation Matrix T = [tx ty]
Equation of line L =
1 1
2 2
Transferred line represented as
L’ = L + [T] =
1 1
2 2
+ [tx ty]
X
Y
0](https://image.slidesharecdn.com/2-150213224833-conversion-gate01/85/2-1-fundamental-of-computer-graphics-4-320.jpg)
![Mechanical Engineering Department – School Of Engineering
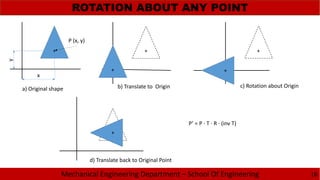
TRANSLATION
5
A(1,1)
B(7,3)
C(1,4)
A(4,3)
B(4,1)
C(4,6)
A triangle translated 3 unit in x direction and 2
unit in y direction.
Triangle ABC represented as
ΔABC =
1 1
4 1
1 4
Translation equation of triangle is
ΔA’B’C’ = ΔABC + [tx ty]
ΔA’B’C’ =
1 1
4 1
1 4
+ [3 2]
=
4 3
7 3
4 6
X0
Y](https://image.slidesharecdn.com/2-150213224833-conversion-gate01/85/2-1-fundamental-of-computer-graphics-5-320.jpg)
![Mechanical Engineering Department – School Of Engineering
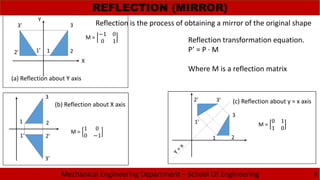
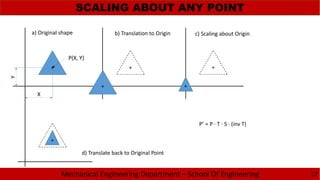
ROTATION
6
X
Y
P(x,y)
P’(x’,y’)
r
r
x=r cosф
y=rsinф
X’=r cos(Ɵ+ф)
y’=rsin(Ɵ+ф)
ф
Ɵ
Point P is represented as
P = [x y]
= [r cos ф r sin ф]
The rotated point be represented as :
P’ = [r cos(Ɵ+ф) r sin(Ɵ+ф)]
= [r (cos Ɵcos ф – sinƟ sin ф) r (sin Ɵ cos ф + cos
Ɵ sin ф )
= [(x cos Ɵ – y sin Ɵ) (x sin Ɵ + y cos Ɵ)
This can be expressed as :
P’ = [x y]
cos Ɵ sin Ɵ
− Ɵ cos Ɵ
= = P × [R]
where R is rotation matrix
R =
cos Ɵ sin Ɵ
− Ɵ cos Ɵ
If rotation is anticlockwise then Ɵ is +VE
If rotation is clockwise then Ɵ is -VE](https://image.slidesharecdn.com/2-150213224833-conversion-gate01/85/2-1-fundamental-of-computer-graphics-6-320.jpg)

![Mechanical Engineering Department – School Of Engineering
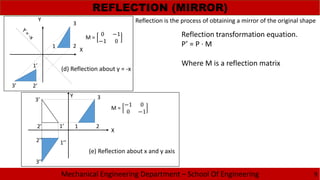
REFLECTION ABOUT ANY AXIS y = mx + c
18
a) Original Shape b) Translation to Origin
c) Rotation
d) Reflection
e) Inverse Rotation f) Inverse Translation
Original Image
Mirror Image
P’ = P · T · R · M · [inv R] · [inv T]](https://image.slidesharecdn.com/2-150213224833-conversion-gate01/85/2-1-fundamental-of-computer-graphics-18-320.jpg)
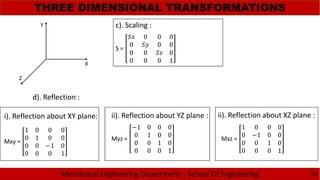
![Mechanical Engineering Department – School Of Engineering
THREE DIMENSIONAL TRANSFORMATIONS
23
X
Z
Y
a). Translation :
[x’ y’ z’ 1] = [x y z 1] ·
1 0 0 0
0 1 0 0
0 0 1 0
1
b). Rotation :
Rz =
Ɵ Ɵ 0 0
− Ɵ Ɵ 0 0
0 0 1 0
0 0 0 1
i). Rotation about Z axis: ii). Rotation about X axis :
Rx =
1 0 0 0
0 Ɵ Ɵ 0
0 − Ɵ Ɵ 0
0 0 0 1
ii). Rotation about Y axis :
Ry =
Ɵ 0 − Ɵ 0
0 1 0 0
Ɵ 0 Ɵ 0
0 0 0 1](https://image.slidesharecdn.com/2-150213224833-conversion-gate01/85/2-1-fundamental-of-computer-graphics-23-320.jpg)


The document discusses fundamental concepts of geometric transformations in computer graphics, including translation, rotation, scaling, reflection, and shear, and their applications in modeling and animation. It covers the mathematical representation of these transformations using matrices and homogeneous coordinates, as well as composite transformations. Examples and equations are provided to illustrate the application of these transformations in various scenarios.