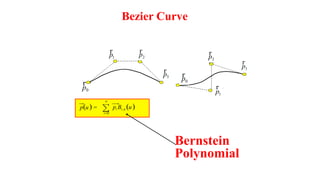

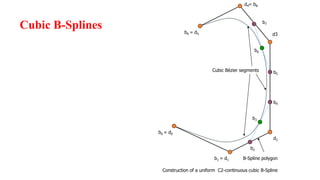
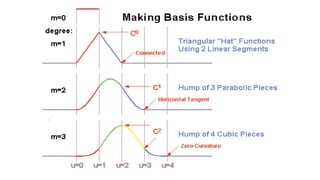
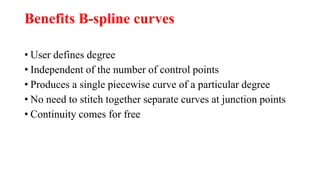
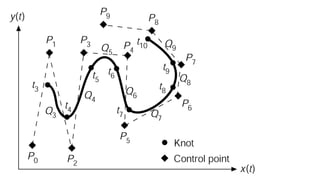
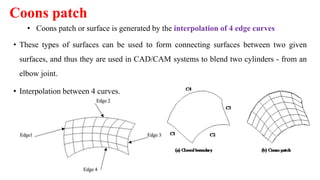

The document discusses the differences between analytic and synthetic curves in mechanical engineering, detailing the parametric representation and continuity of curves. It elaborates on modeling techniques such as Hermite curves, Bezier curves, and B-splines, highlighting their characteristics, advantages, and disadvantages. Additionally, it addresses surface modeling methods, emphasizing their applications and complexities in design processes.