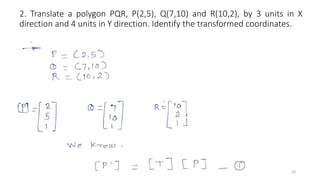
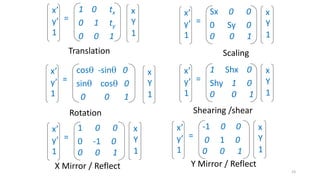
1. The document discusses various 2D transformations including translation, rotation, scaling, reflection, shearing, and their representation using homogeneous coordinates and homogeneous transformations. All transformations can be represented as matrix multiplication using homogeneous coordinates.
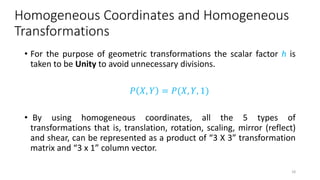
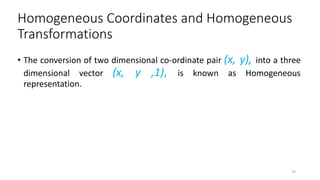
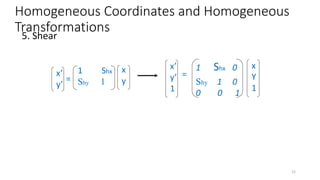
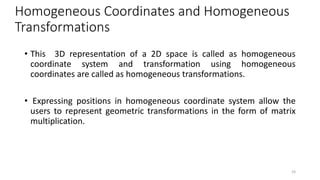
2. Homogeneous coordinates allow geometric transformations to be expressed as matrix multiplications, enabling efficient concatenation of multiple transformations. Any 2D point (x,y) can be represented as a 3D homogeneous coordinate (x,y,1).
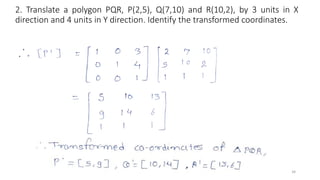
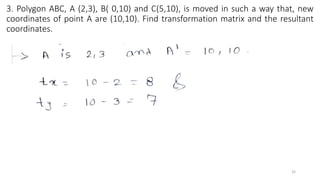
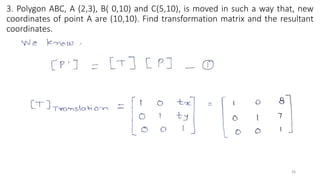
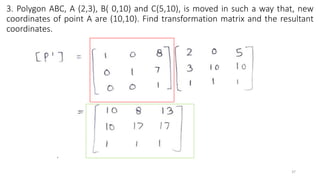
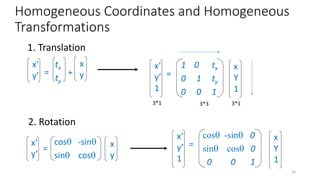
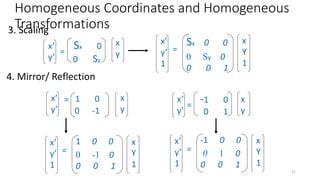
3. Common transformations like translation, rotation, scaling, etc. that were previously represented using vector addition can now be uniformly represented using matrix multiplications in homogeneous coordinates. This allows multiple transformations to be applied sequentially with a single matrix multiplication.
![• A translation moves all points in an
object along the same straight-line
path to new positions.
• The path is represented by a vector,
called the translation or shift vector.
p'x = tx + px
p'y = ty + py
tx
t
= 6
= 4
x’
y’
x
y
tx
ty
= +
Translation
4
[P'] = [ T] + [P]
P’
P](https://image.slidesharecdn.com/2dtransformation-221129111500-4979cf2c/85/2D-Transformation-pdf-4-320.jpg)
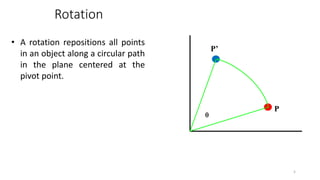
![
P(x,y)
r
P’(x’, y’)
r
• x = r cos
• y = r sin
• x’ = r cos( + )
• x’ = r cos cos - r sin sin
• y’ = r sin( + )
• y’ = r cos sin + r sin cos
• From (A) & (B)
• x’ = xcos - ysin
• From (A) & (C)
• y’ = xsin + ycos
(A)
(B)
Rotation
6
(C)
[P'] = [T] [P]
x’
y’
x
y
=
cos -sin
sin cos](https://image.slidesharecdn.com/2dtransformation-221129111500-4979cf2c/85/2D-Transformation-pdf-6-320.jpg)
![Scaling
• Scaling changes the size of an
object and involves two scale
factors, Sx and Sy for the X and Y
coordinates respectively.
• Scales are about the origin.
• x’ = sx * x
• y’ = sy * y
[P'] = [T] [P]
x’
y’
x
y
=
Sx 0
0 Sy
Image Reference:- CAD/CAM AND AUTOMATION By
Farazdak Haideri, Nirali Prakashan, Ninth Edition
7](https://image.slidesharecdn.com/2dtransformation-221129111500-4979cf2c/85/2D-Transformation-pdf-7-320.jpg)
![Reflection
[P'] = [T] [P]
x’
y’
x
y
=
1 0
0 -1
@ Y-axis
x’
y’
x
y
=
-1 0
0 1
@ X-axis
[P'] = [T] [P]
x’ = x
y’ = -y
x’ = -x
y’ = y
8](https://image.slidesharecdn.com/2dtransformation-221129111500-4979cf2c/85/2D-Transformation-pdf-8-320.jpg)
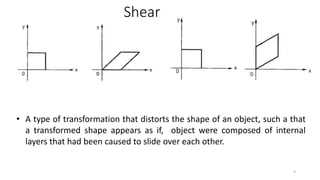
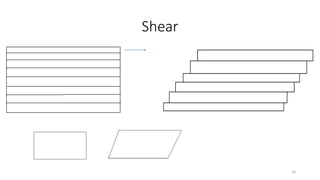
![Shear
•x’ = x + yshx
•y’ = y
[P'] = [T] [P]
x’
y’
x
y
=
1 Shx
Shy 1
•x’ = x
•y’ = y + xshy
x’
y’
x
y
=
1 Shx
0 1
x’
y’
x
y
=
1 0
Shy 1
11](https://image.slidesharecdn.com/2dtransformation-221129111500-4979cf2c/85/2D-Transformation-pdf-11-320.jpg)
![2D Transformations
12
x’
y’
x
y
tx
ty
= +
x’
y’
x
y
=
cos -sin
sin cos
x’
y’
x
y
=
Sx 0
0 Sy
x’
y’
x
y
= 1 0
0 -1
x’
y’
x
y
=
-1 0
0 1
x’
y’
x
y
=
1 Shx
Shy 1
[P'] = [ T] + [P]
[P'] = [T] [P]](https://image.slidesharecdn.com/2dtransformation-221129111500-4979cf2c/85/2D-Transformation-pdf-12-320.jpg)
![Composite Transformations /
Concatenations
25
[P'] = [Tn] [Tn-1] [Tn-2]…… [T3] [T2] [T1] [P]
[P'] = [T] [P]
[T1], [T2], [T3],…….., [Tn-2], [Tn-1],[Tn]](https://image.slidesharecdn.com/2dtransformation-221129111500-4979cf2c/85/2D-Transformation-pdf-25-320.jpg)
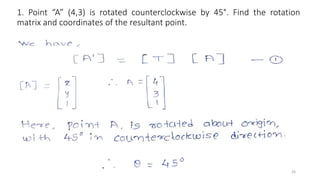
![1. Point “A” (4,3) is rotated counterclockwise by 45°. Find the rotation matrix and
coordinates of the resultant point.
27
[A']
[T]Rotation
[A]
[T]](https://image.slidesharecdn.com/2dtransformation-221129111500-4979cf2c/85/2D-Transformation-pdf-27-320.jpg)