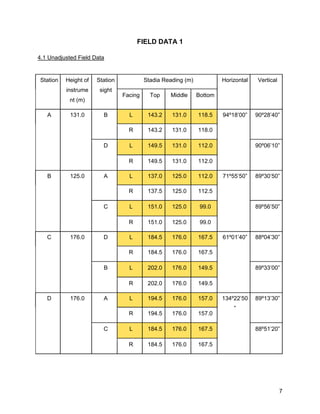
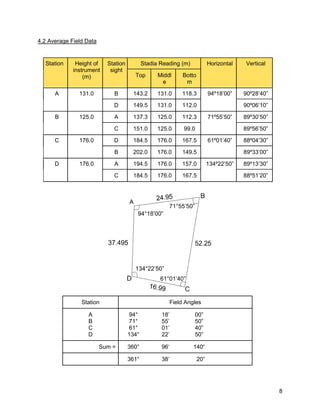
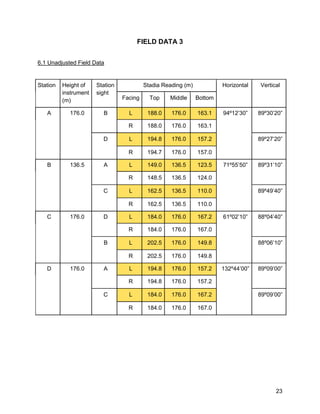
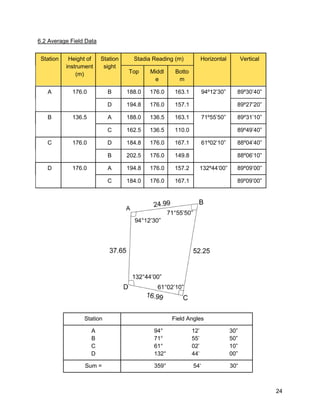
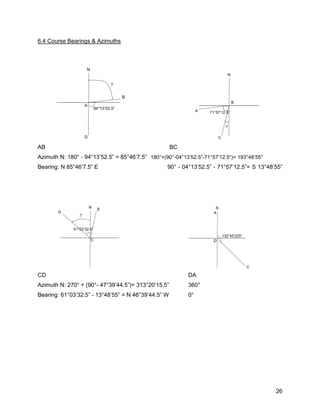
This document is a field report for a traversing survey conducted by students. It contains unadjusted and average field data from three separate traverses, including measured horizontal and vertical angles between stations. It also shows the calculations to determine angular errors, angle adjustments, course bearings, latitudes and departures, adjusted coordinates, and station positions. The objectives, equipment used, and results are presented in tables and graphs.
![SCHOOL OF ARCHITECTURE, BUILDING AND
DESIGN
BACHELOR OF QUANTITY SURVEYING (HONOURS)
SITE SURVEYING [QSB 60103]
FIELD WORK 2 REPORT
TRAVERSING
DARREN TAN QUAN WEN 0322662
YEAP PHAY SHIAN 0322243
LEE XIN YING 0322432
MICHELLE TUNG MAN KAYE 0324175
LOH MUN TONG 0323680
LECTURER: MR. CHAI VOON CHIET
SUBMISSION DATE: 8th DECEMBER 2016](https://image.slidesharecdn.com/traversing-161206055210/85/Traversing-1-320.jpg)







![11
4.5 Course Latitudes & Departures
Cos β Sin β L cosβ L sinβ
Station Bearing, β Length, L Cosine Sine Latitude Departure
A
B
C
D
A
N 86°06’35” E
S 14°35’20” W
N 46°01’45” W
0°
24.950
52.250
16.990
37.495
0.0678
0.9678
0.6943
1.000
0.9977
0.2519
0.7197
0.000
+ 1.69161
- 50.56755
+ 11.79620
+ 37.49500
+ 24.8926
- 13.1618
- 12.2277
0.0000
Sum = 131.685 + 0.41526 - 0.4969
Accuracy = 1: (P/Ec)
For average land surveying, an accuracy is typically about 1:3000.
Ec = [(Error in Latitude)2
+ (Error in Departure)2
] 1/2
= [(0.41526)
2
+ (-0.4969)
2
]
1/2
= 0.6476
P = 131.685
Accuracy = 1: (131.685 / 0.6478)
= 1: 203.28
∴ The traversing is not acceptable.](https://image.slidesharecdn.com/traversing-161206055210/85/Traversing-12-320.jpg)
![12
4.6 Adjusted Latitudes & Departures
The Compass Rule
Correction = – [∑∆y] / P × L or – [∑∆x] / P × L
Where
∑∆y and ∑∆x = the error in latitude or in departure
P = the total length or perimeter of the traverse
L = the length of a particular course
Compass rule correction to latitude and departure
Unadjusted Correction Adjusted
Latitude Departure Latitude Departure Latitude Departure
A
+1.8418 +24.9225 0.0214 0.02230 +1.8632 +24.9448
B
-51.1381 -12.5647 0.0452 0.04697 -51.0929 -12.51773
C
+11.5328 -12.4758 0.0146 0.01515 +11.5474 -12.46065
D
+37.65 0 0.0323 0.03358 +37.6823 +0.03358
A
-0.1135 -0.118 0.1135 0.118 0.0 0.0
Check Check](https://image.slidesharecdn.com/traversing-161206055210/85/Traversing-13-320.jpg)



![19
5.5 Course Latitudes & Departures
Cos β Sin β L cosβ L sinβ
Station Bearing, β Length, L Cosine Sine Latitude Departure
A
B
C
D
A
N 85°46’30” E
S 13°48’10” W
N 47°15’00” W
0°
24.990
52.660
16.990
37.650
0.0737
0.9711
0.6788
1.000
0.9973
0.2386
0.7343
0.000
+ 1.8418
- 51.1381
+ 11.5328
+ 37.650
+ 24.9225
- 12.5647
- 12.4758
0.0000
Sum = 132.290 - 0.1135 - 0.1180
Accuracy = 1: (P/Ec)
For average land surveying, an accuracy is typically about 1:3000.
Ec = [(Error in Latitude)2
+ (Error in Departure)2
] 1/2
= [(-0.1135)
2
+ (-0.1180)
2
]
1/2
= 0.1637
P = 132.290
Accuracy = 1: (132.290 / 0.1637)
= 1: 808.12
∴ The traversing is not acceptable.](https://image.slidesharecdn.com/traversing-161206055210/85/Traversing-20-320.jpg)
![20
5.6 Adjusted Latitudes & Departures
The Compass Rule
Correction = – [∑∆y] / P × L or – [∑∆x] / P × L
Where
∑∆y and ∑∆x = the error in latitude or in departure
P = the total length or perimeter of the traverse
L = the length of a particular course
Compass rule correction to latitude and departure
Unadjusted Correction Adjusted
Latitude Departure Latitude Departure Latitude Departure
A
+1.69161 +24.8926 -0.078678 0.09415 +1.612932 +24.98675
B
-50.56755 -13.1618 -0.164767 0.19716 -50.732317 -12.96464
C
+11.7962 -12.2277 -0.053577 0.06411 +11.74262
3
-12.16359
D
+37.495 0 -0.118238 0.14148 +37.37676
2
+0.14148
A
0.41526 -0.4969 -0.41526 0.4969 0.0 0.0
Check Check](https://image.slidesharecdn.com/traversing-161206055210/85/Traversing-21-320.jpg)



![27
6.5 Course Latitudes & Departures
Cos β Sin β L cosβ L sinβ
Station Bearing, β Length, L Cosine Sine Latitude Departure
A
B
C
D
A
N 85°46’7.5” E
S 13°48’55” W
N 46°39’44.5”
W
0°
24.898
52.571
16.889
37.645
0.0738
0.9711
0.6863
1.000
0.9973
0.2388
0.7273
0.000
+ 1.8371
- 51.0517
+ 11.5909
+ 37.6450
+ 24.8301
- 12.5540
- 12.2834
0.0000
Sum = 132.003 0.0213 - 0.0073
Accuracy = 1: (P/Ec)
For average land surveying, accuracy is typically about 1:3000.
Ec = [(Error in Latitude) 2
+ (Error in Departure) 2
] 1/2
= [(0.0213) 2
+ (- 0.0073) 2
] 1/2
= 0.0225
P = 132.003
Accuracy = 1: (132.003 / 0.0225)
= 1: 5866.80
∴ The traversing is acceptable.](https://image.slidesharecdn.com/traversing-161206055210/85/Traversing-28-320.jpg)
![28
6.6 Adjusted Latitudes & Departures
The Compass Rule
Correction = – [∑∆y] / P × L or – [∑∆x] / P × L
Where
∑∆y and ∑∆x = the error in latitude or in departure
P = the total length or perimeter of the traverse
L = the length of a particular course
Correction to latitude and departure
Unadjusted Correction Adjusted
Latitude Departure Latitude Departure Latitude Departure
A
+ 1.8371 + 24.8301 -0.00402 + 0.00138 + 1.83308 +24.83148
B
-51.0517 -12.5540 - 0.00848 + 0.00291 -51.06018 -12.55109
C
+ 11.5909 -12.2834 - 0.00273 + 0.00093 +11.58817 -12.28247
D
+ 37.6450 0.0000 - 0.00607 + 0.00208 +37.63893 + 0.00208
A
+ 0.0213 - 0.0073 - 0.02130 + 0.00730 0.0000 0.0000
Checked Checked](https://image.slidesharecdn.com/traversing-161206055210/85/Traversing-29-320.jpg)