Downloaded 68 times



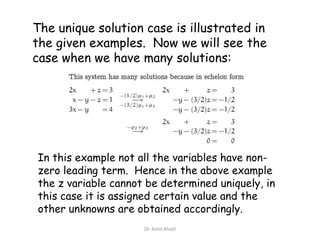




The document provides an overview of linear algebra concepts for mathematical geophysics, including: - Definitions of equations, systems of linear algebraic equations, and the Gauss-Jordan reduction method. - Types of systems include unique solution, no solution, and infinitely many solutions. - Einstein summation convention simplifies tensor equations by implicitly summing over repeated indices. - Gaussian elimination uses row operations to put a system of equations in row echelon form and then reduced row echelon form to solve for variables. - Systems can have unique solutions, no solutions, or multiple solutions depending on the relationships between equations and variables.