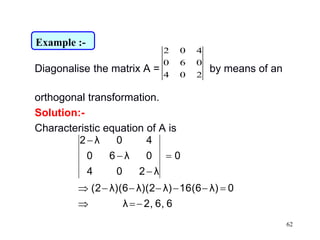
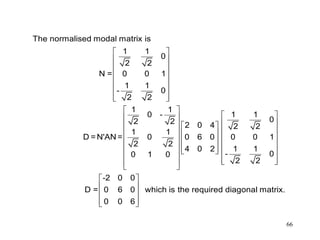
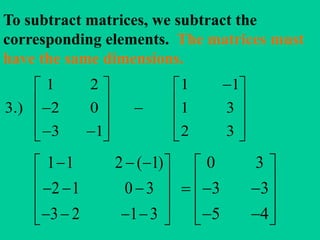
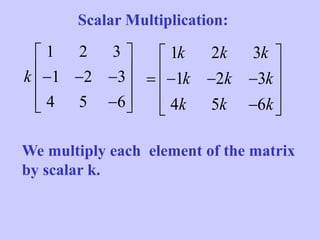
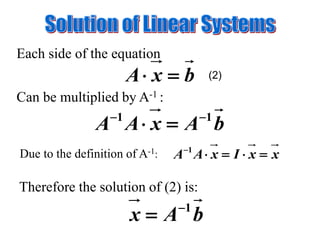
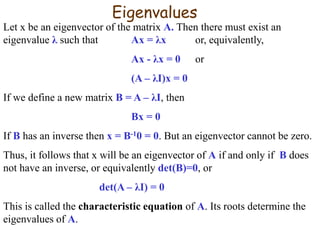
Here are the key steps to find the eigenvalues of the given matrix:
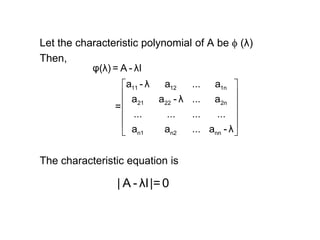
1) Write the characteristic equation: det(A - λI) = 0
2) Expand the determinant: (1-λ)(-2-λ) - 4 = 0
3) Simplify and factor: λ(λ + 1)(λ + 2) = 0
4) Find the roots: λ1 = 0, λ2 = -1, λ3 = -2
Therefore, the eigenvalues of the given matrix are -1 and -2.


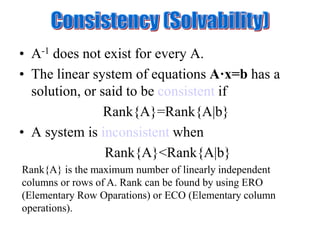
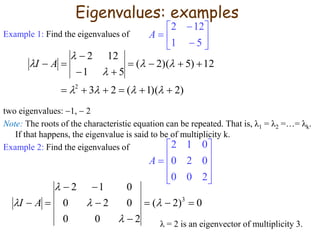
![• The following operations applied to the augmented
matrix [A|b], yield an equivalent linear system
– Interchanges: The order of two rows/columns can
be changed
– Scaling: Multiplying a row/column by a nonzero
constant
– Sum: The row can be replaced by the sum of that
row and a nonzero multiple of any other row.
One can use ERO and ECO to find the Rank as follows:
EROminimum # of rows with at least one nonzero entry
or
ECOminimum # of columns with at least one nonzero entry](https://image.slidesharecdn.com/matricesppt-171108100049/85/Matrices-ppt-15-320.jpg)
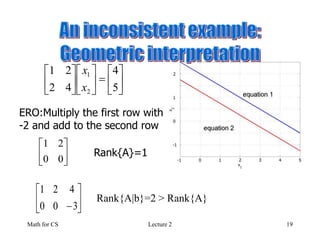
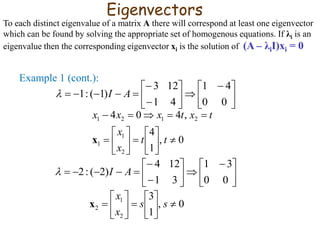
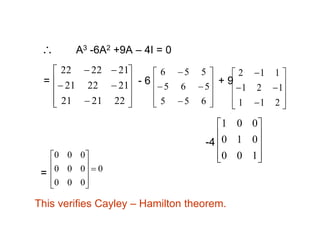
![CAYLEY HAMILTON THEOREM
Every square matrix satisfies its own
characteristic equation.
Let A = [aij]n×n be a square matrix
then,
nnnn2n1n
n22221
n11211
a...aa
................
a...aa
a...aa
A
](https://image.slidesharecdn.com/matricesppt-171108100049/85/Matrices-ppt-37-320.jpg)
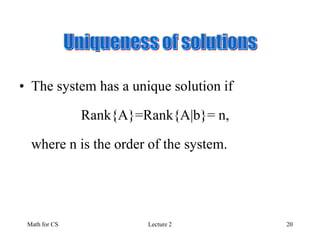
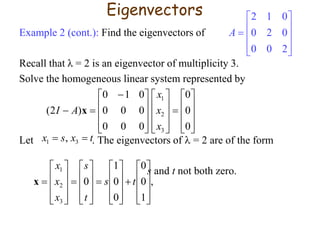
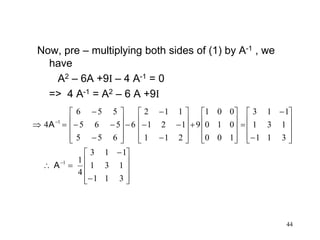
![Note 1:- Premultiplying equation (1) by A-1 , we
have
n n-1 n-2
0 1 2 n
n n-1 n-2
0 1 2 n
We are to prove that
p λ +p λ +p λ +...+p = 0
p A +p A +p A +...+p I= 0 ...(1)
I
n-1 n-2 n-3 -1
0 1 2 n-1 n
-1 n-1 n-2 n-3
0 1 2 n-1
n
0 =p A +p A +p A +...+p +p A
1
A =- [p A +p A +p A +...+p I]
p](https://image.slidesharecdn.com/matricesppt-171108100049/85/Matrices-ppt-39-320.jpg)

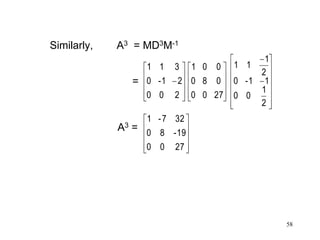
![57
Now, since D = M-1AM
=> A = MDM-1
A2 = (MDM-1) (MDM-1)
= MD2M-1 [since M-1M =
I]
300
020
001
200
21-0
311
300
120
211
2
1
00
11-0
2
1
11
AMM 1](https://image.slidesharecdn.com/matricesppt-171108100049/85/Matrices-ppt-57-320.jpg)