Downloaded 123 times


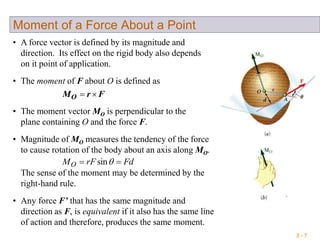
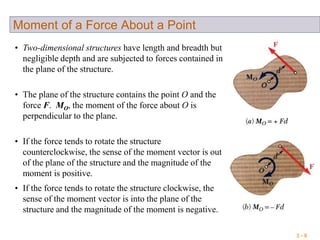
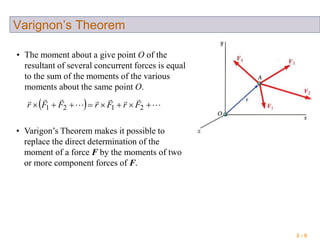
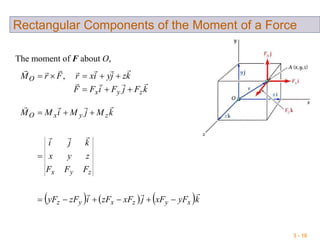


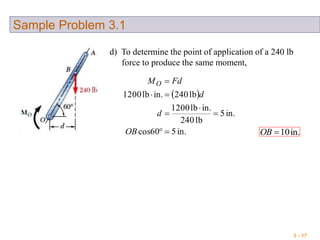
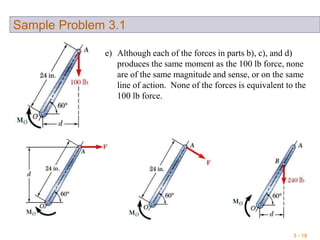
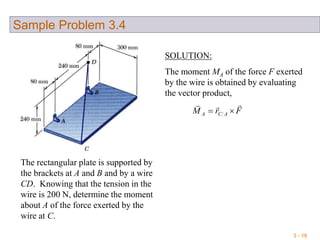
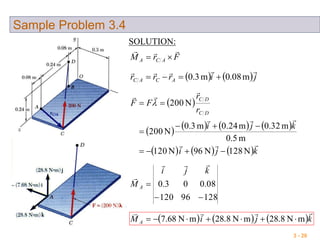


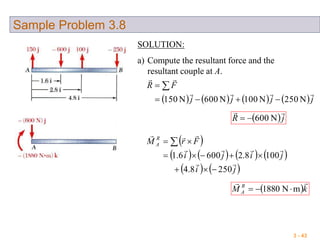
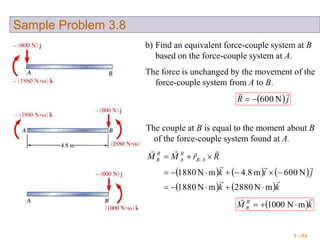
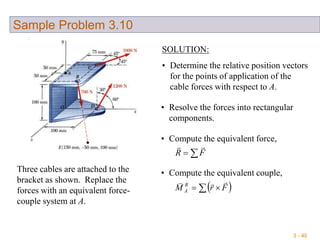
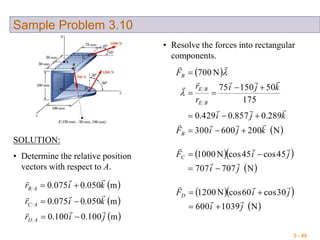

This document provides an introduction to analyzing forces acting on rigid bodies. It defines key terms like moment of a force, vector and scalar products, and equivalent force systems. It also presents the principles of transmissibility and Varignon's theorem. Sample problems demonstrate calculating the moment of a force about a point and determining equivalent forces that produce the same moment. The document aims to describe how to represent and simplify systems of forces exerted on rigid bodies.









































































































