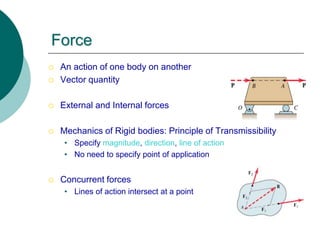
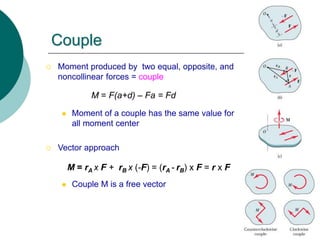
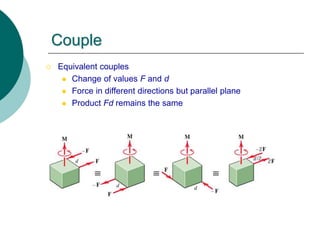
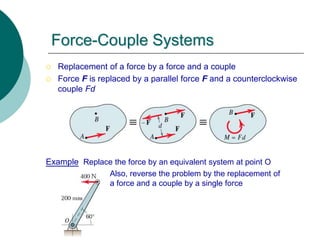
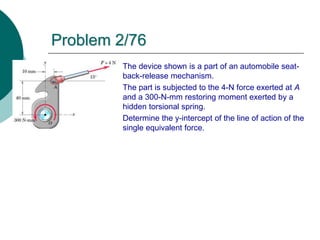
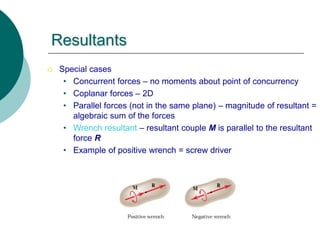
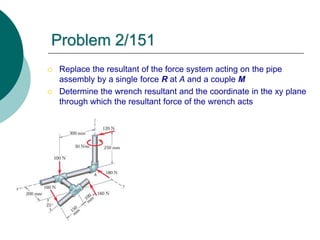
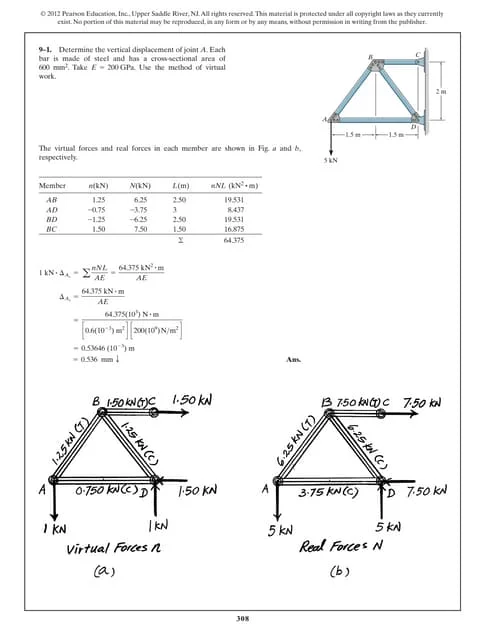
This document provides an overview of engineering statics concepts related to force systems. It defines key terms like force, vector, moment, and couple. It also describes methods for analyzing both 2D and 3D force systems, including resolving forces into rectangular components, calculating moments and couples, and determining resultant forces and wrench resultants. The examples show how to use these methods to solve static equilibrium problems involving various force combinations and configurations.