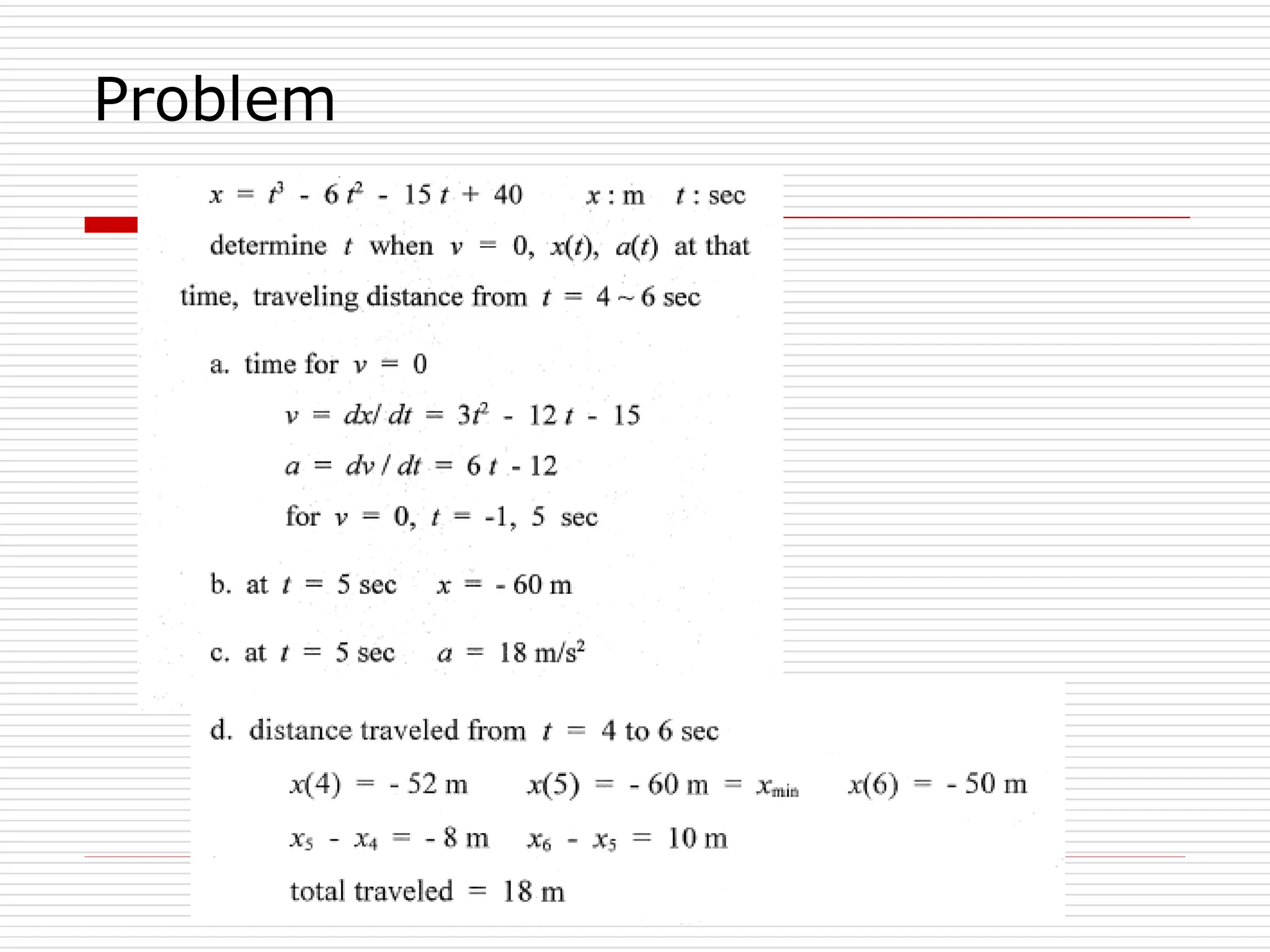
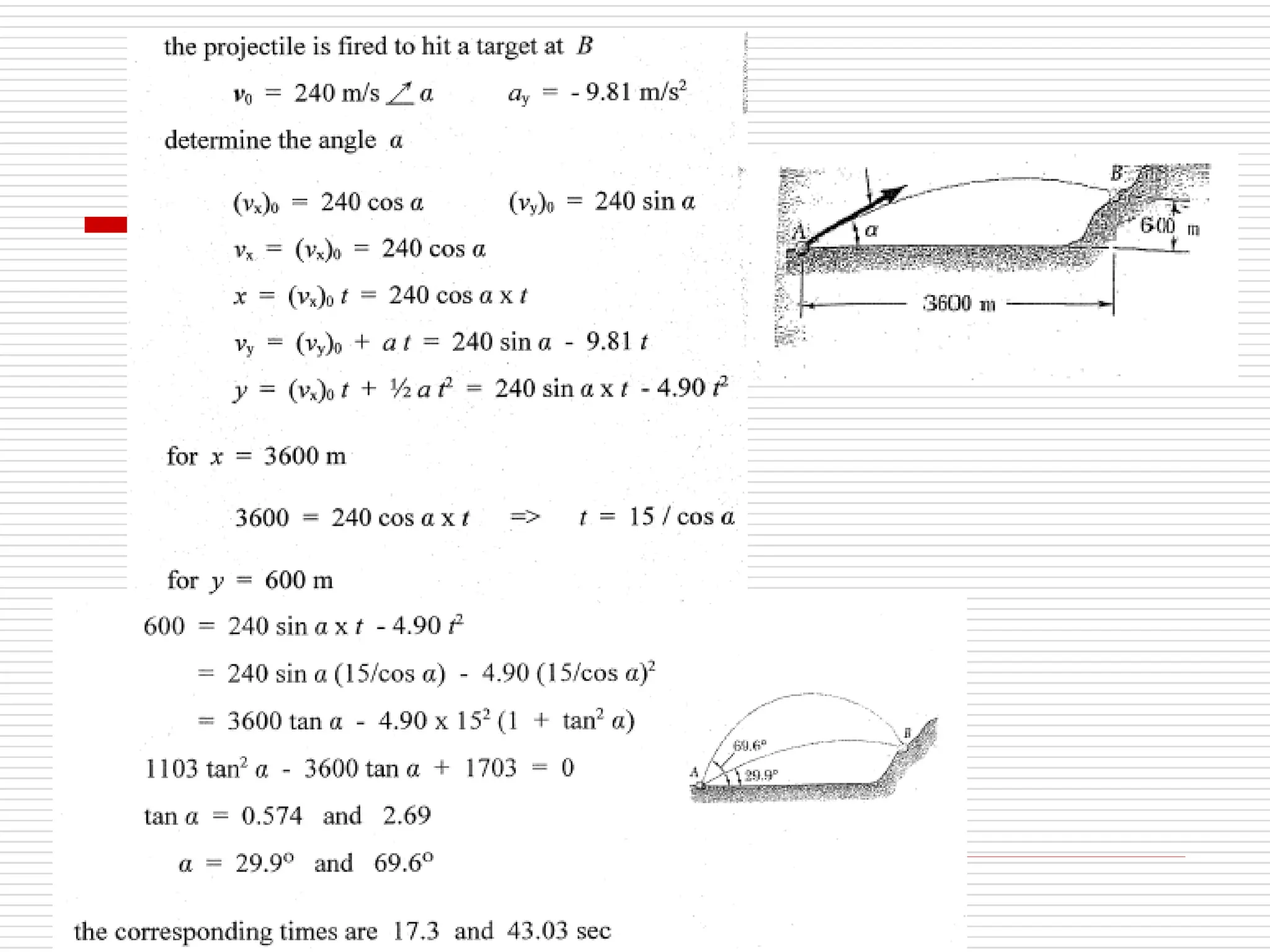
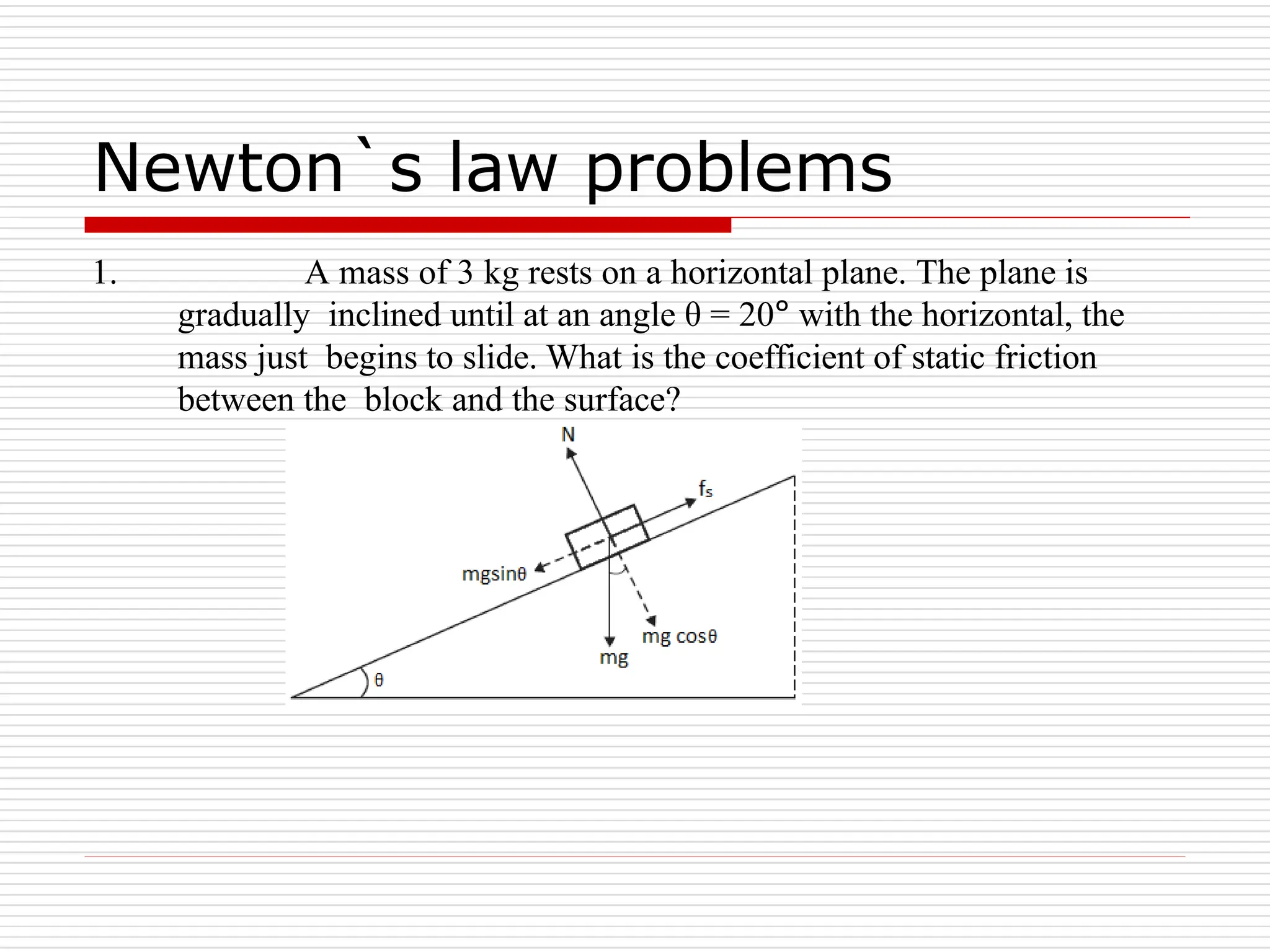
The document outlines fundamental concepts in engineering mechanics, focusing on statics, dynamics, and properties of materials. Key topics include Newton's laws of motion, equilibrium of particles and rigid bodies, moments, friction, and dynamics of particles, accompanied by problem-solving examples. It serves as a comprehensive guide for mechanical engineering students to understand and apply the principles of mechanics in engineering scenarios.





























![A connecting rod, also called a 'con rod',] is the part of a piston engine wh...](https://cdn.slidesharecdn.com/ss_thumbnails/03bp-connectingrods000-240712034102-7503c3ac-thumbnail.jpg?width=640&height=640&fit=bounds)




























