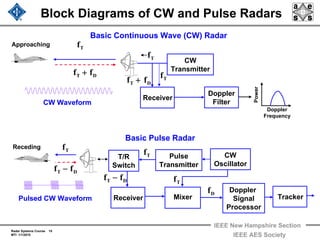
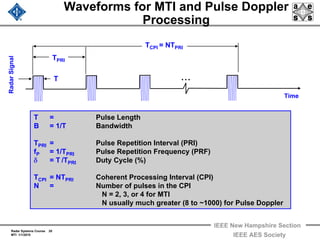
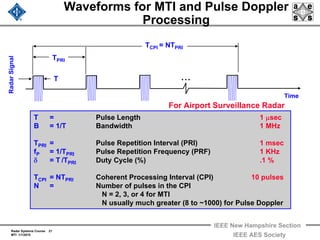
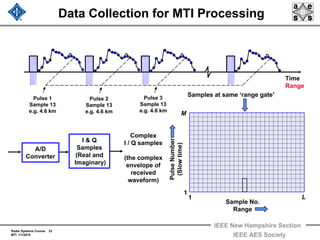
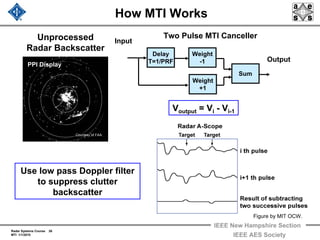
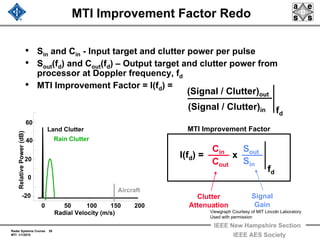
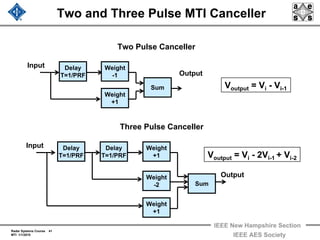
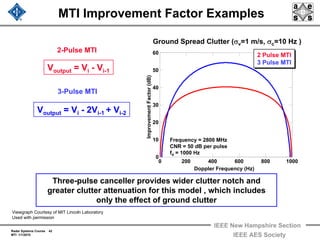
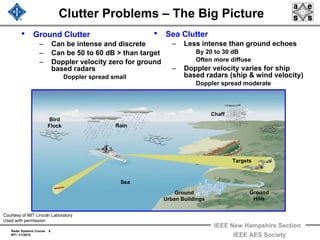
This document contains lecture slides about radar clutter rejection techniques. It discusses the history of moving target indication (MTI) and how digital technology has enabled more advanced processing. MTI uses Doppler filtering to suppress stationary clutter and detect moving targets. Early MTI employed crude subtraction of stored pulses. Modern digital implementations allow complex signal processing over many pulses for improved clutter cancellation.

![Radar Systems Course 10
MTI 1/1/2010
IEEE New Hampshire Section
IEEE AES Society
The Doppler Effect
Transmitted Signal:
Received Signal:
( ) ( ) ( )tf2jexptAts 0T π=
( ) ( ) ( )[ ]tff2jexptAts D0R +πτ−α=
c
R2 0
=τ
λ
==
V2
c
fV2
f 0
D
Time Delay Doppler Frequency
( ) VtRtR 0 −=
Transmitted
Signal
Received
Signal Target
+ Approaching targets
- Receding targets
• The amplitude of the backscattered
signal is very weak
• The frequency of the received signal
is shifted by the Doppler Effect
• The delay of the received echo is
proportional to the distance to the target](https://image.slidesharecdn.com/radar-2009-a12-clutter-rejection-basics-and-mti-160213204742/85/Radar-2009-a-12-clutter-rejection-basics-and-mti-10-320.jpg)