Download as PPSX, PPTX

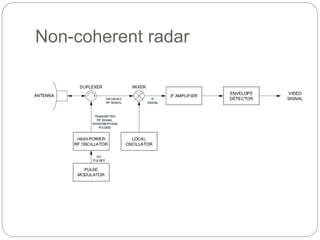
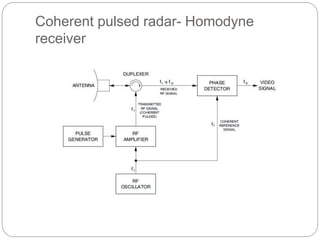
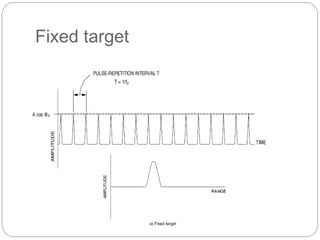
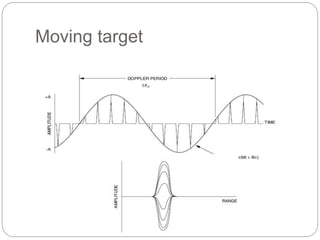
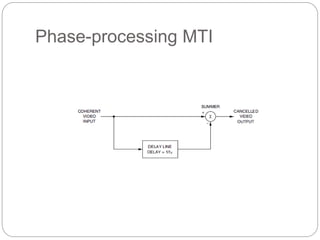
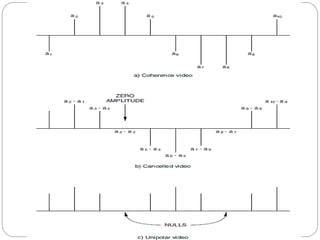

This document discusses different types of pulsed radar systems and moving target indication techniques. It describes coherent and non-coherent radar systems, with coherent systems able to use echo phase information to determine target range and velocity. It then focuses on phase processing moving target indication using a delay-line canceller. The canceller subtracts delayed and undelayed video signals, causing signals from stationary targets to cancel out while signals from moving targets remain. This allows the radar display to only show moving targets.