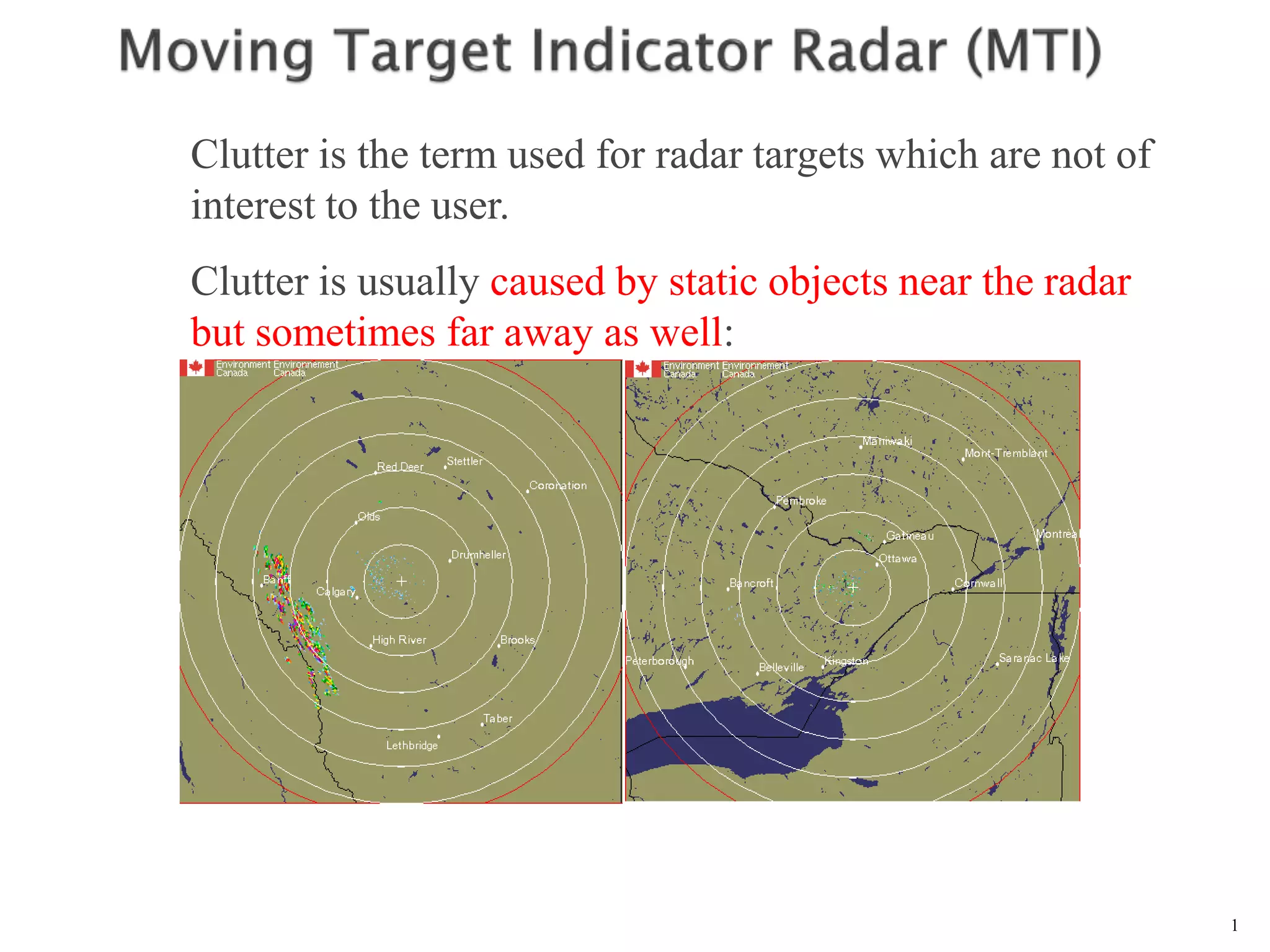
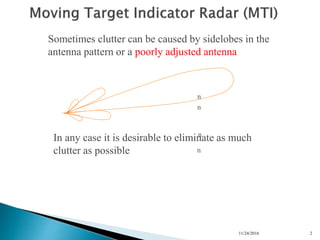
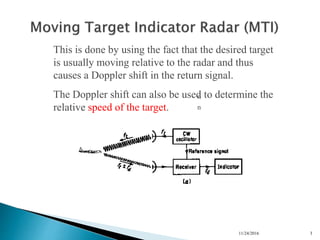
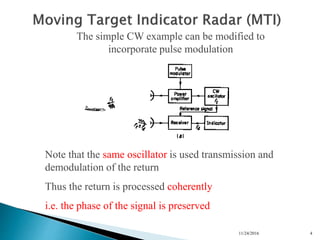
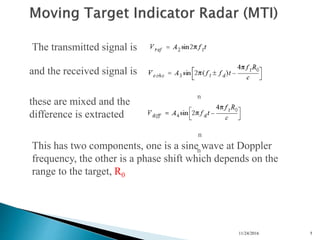
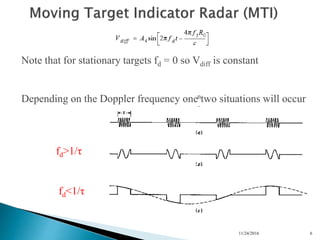
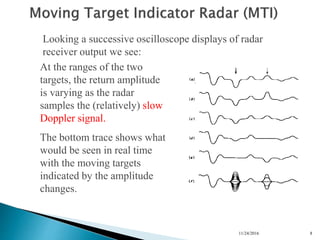
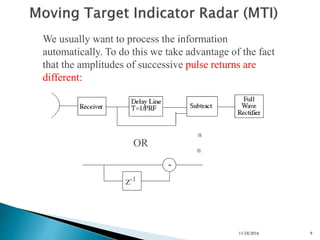
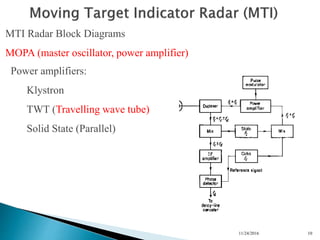
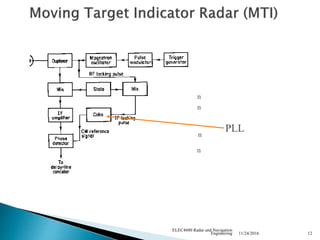
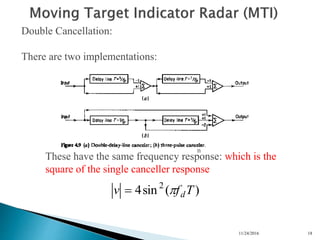
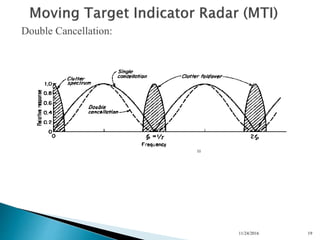
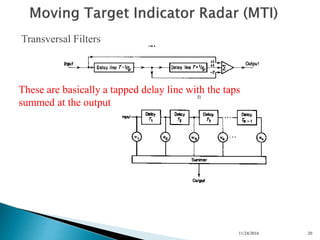
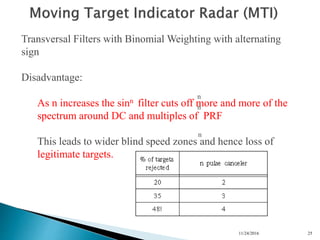
The document discusses radar clutter and techniques for eliminating it. Clutter refers to radar returns from stationary objects that are not of interest. Two main techniques for reducing clutter are discussed: moving target indication (MTI) radar, which detects Doppler shifts from moving targets, and delay line cancellers/transversal filters, which cancel out stationary clutter returns. MTI radars preserve phase coherence to differentiate stationary vs moving targets, while cancellers/filters use weighted signal delays and summing to attenuate clutter signals.