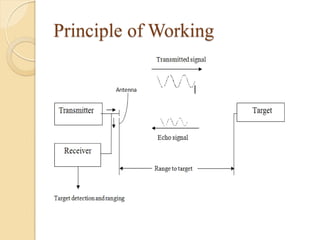
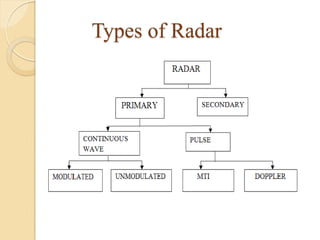
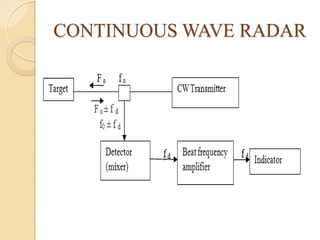
The document provides an overview of radar technology, including its history, principles, and various types such as continuous wave, gated CW, and pulse radar. It discusses the advantages and disadvantages of each type, their applications in areas like unmanned aerial vehicles (UAVs), and technical equations related to radar operation. The conclusion emphasizes radar's capability in detecting object velocity, range, and position, with a mention of lidar as an advanced form of radar.
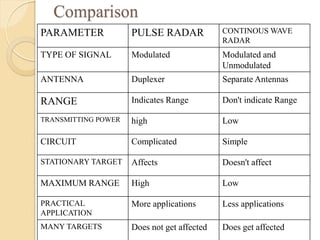
![Radar Range Equation
R max = [P t G б A e /(4П)2Smin]1/4
G = 4ПAe / λ2
A e = Gλ2 / 4П
R max = [Pt Gλ2б / (4П)2 S min]1/4
Where Pr = power received
Pt = power transmitted
G = antenna gain
б = radar cross section of target
A e = effective area](https://image.slidesharecdn.com/radarppt-130708110836-phpapp02/85/Radar-ppt-5-320.jpg)
![REFERENCES
[1] M. Kulkarni, “Microwave and Radar Engineering”, 3rd edition,
Umesh Publication, 2003, pp. 493 – 536
[2] Merri.I.skolnik, “Intoduction to Radar System”, 3rd edition, Tata
McGraw Hill, 2003
[3]“Types of Radar”, Engineers Garage,2012[online]. Available:
http://www.engineersgarage.
com/articles/type-of-radars [accessed: September 2012]
[4] “Types of Radar”, Cristian Wolff, June 10, 2012[online].
Available:http://www.radartutorial.
eu/02.basics/rp05.en.html [accessed: September 2012]
[5] “Radar Basics”, Infoplease, September 22, 2012 [online].
Available: http://www.infoplease.
com/ce6/sci/A0860616.html [accessed: September 2012]
[6] John F.Autin, John Caserta, Mark A.Bates, “A New Gated CW
Radar Implementation”
Horsham, 2010.](https://image.slidesharecdn.com/radarppt-130708110836-phpapp02/85/Radar-ppt-19-320.jpg)