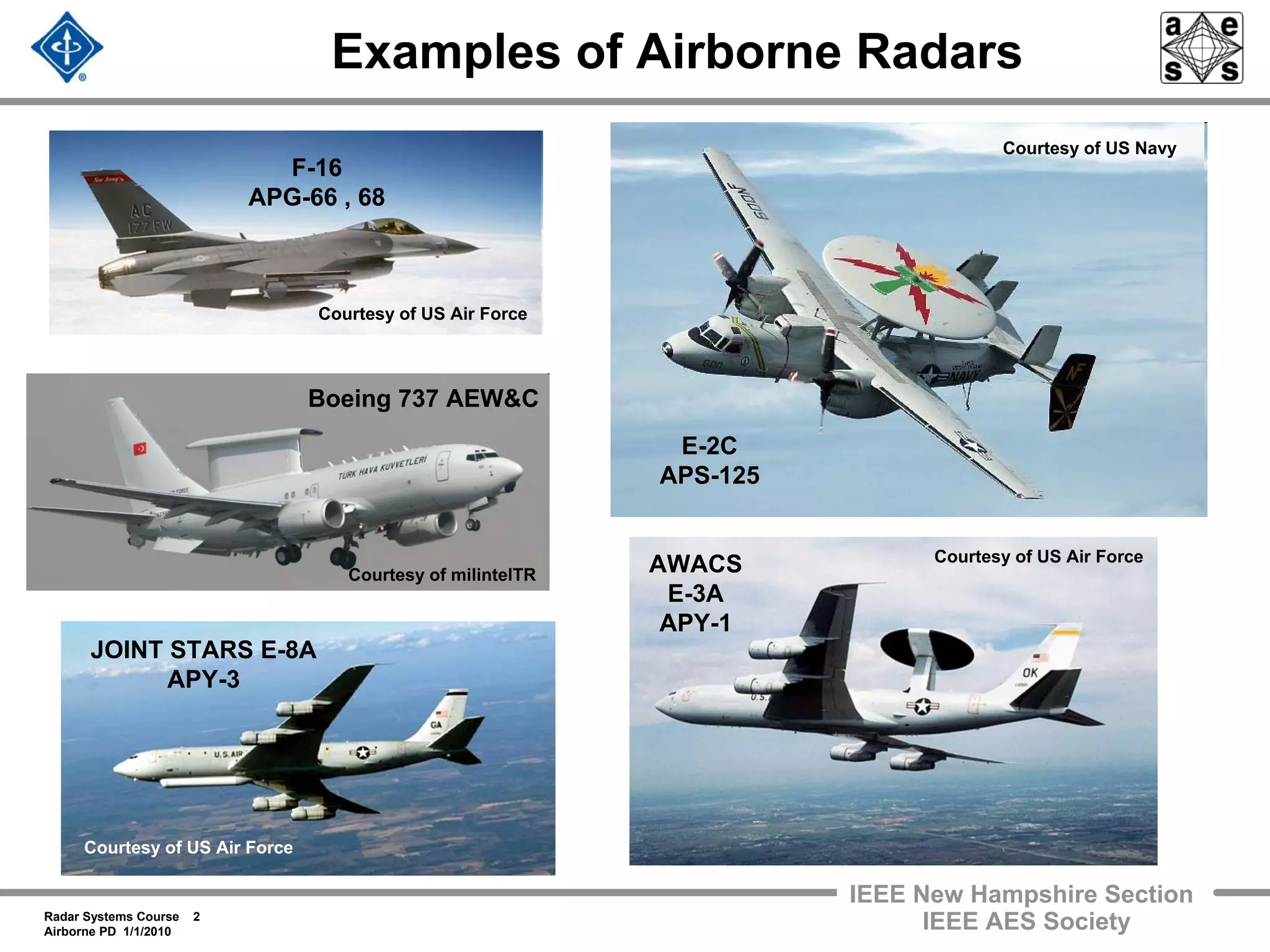
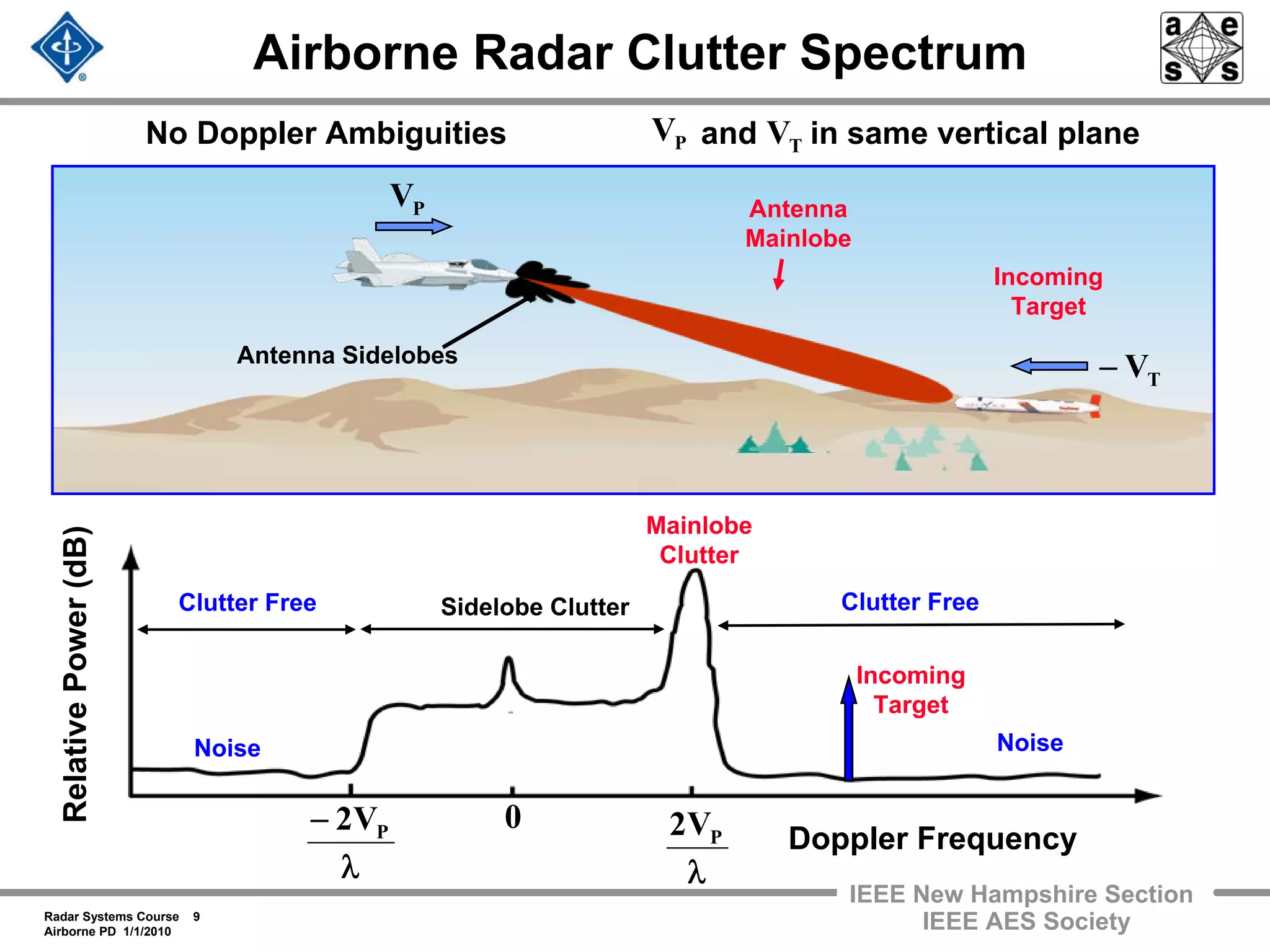
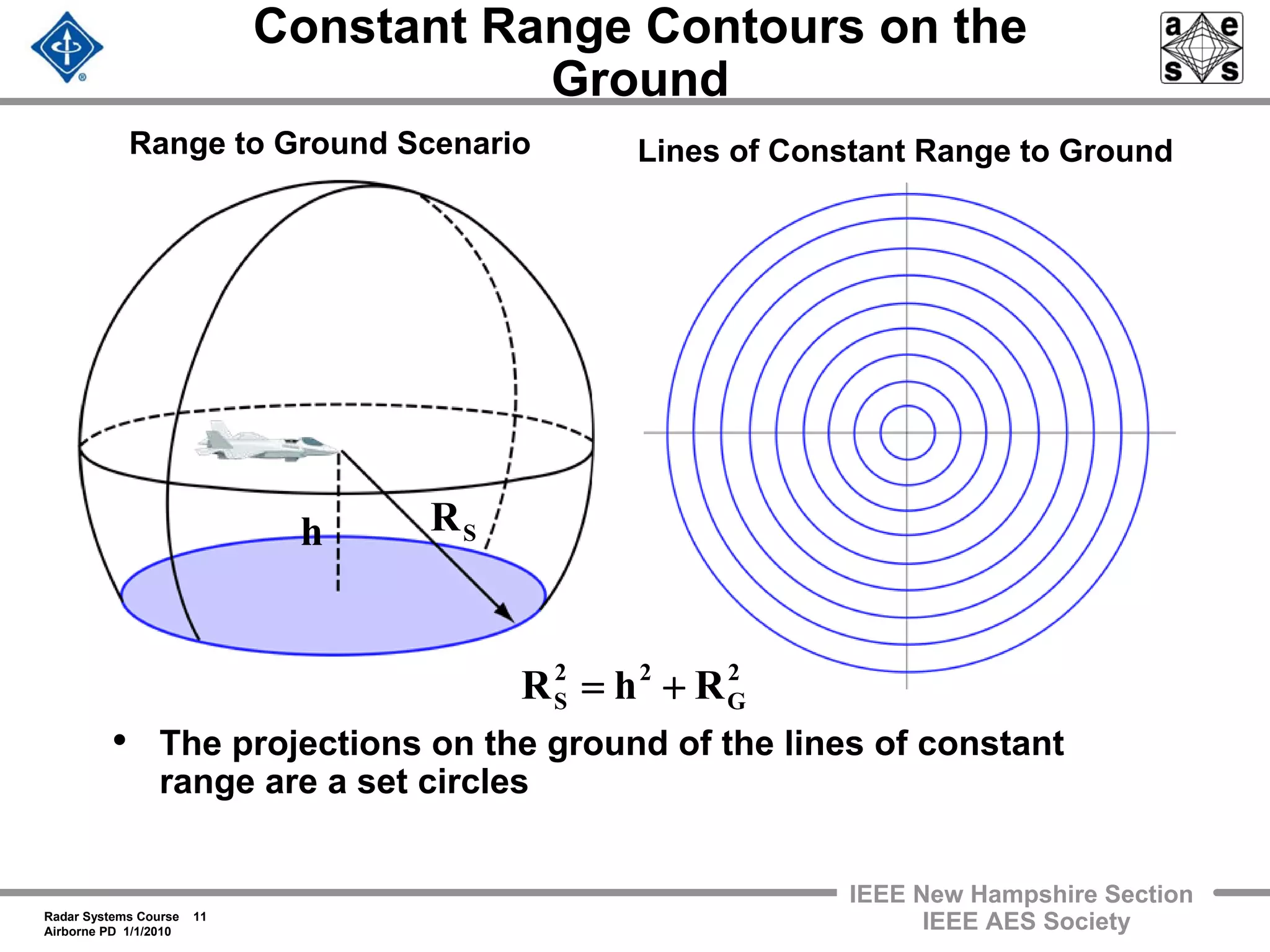
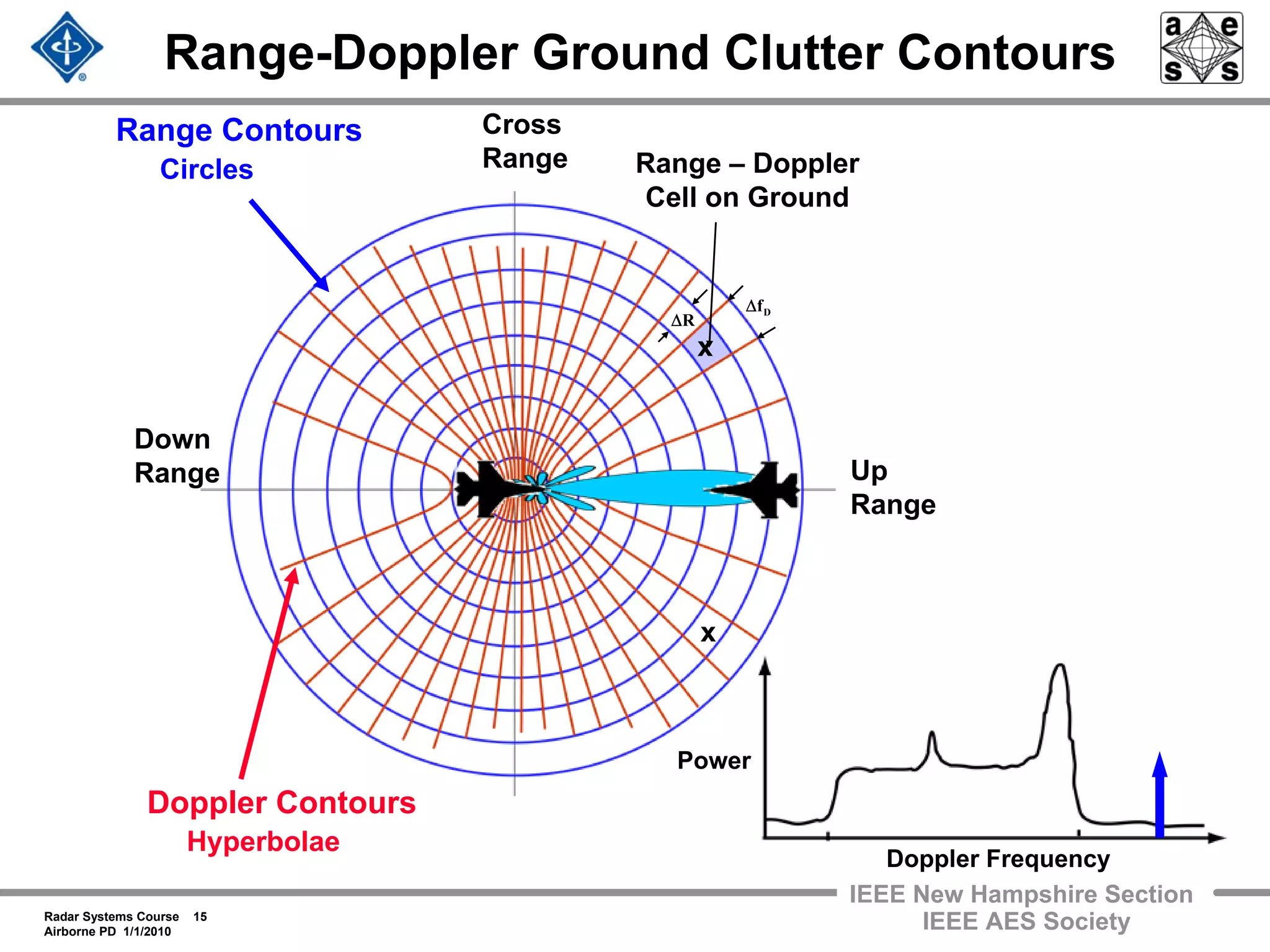
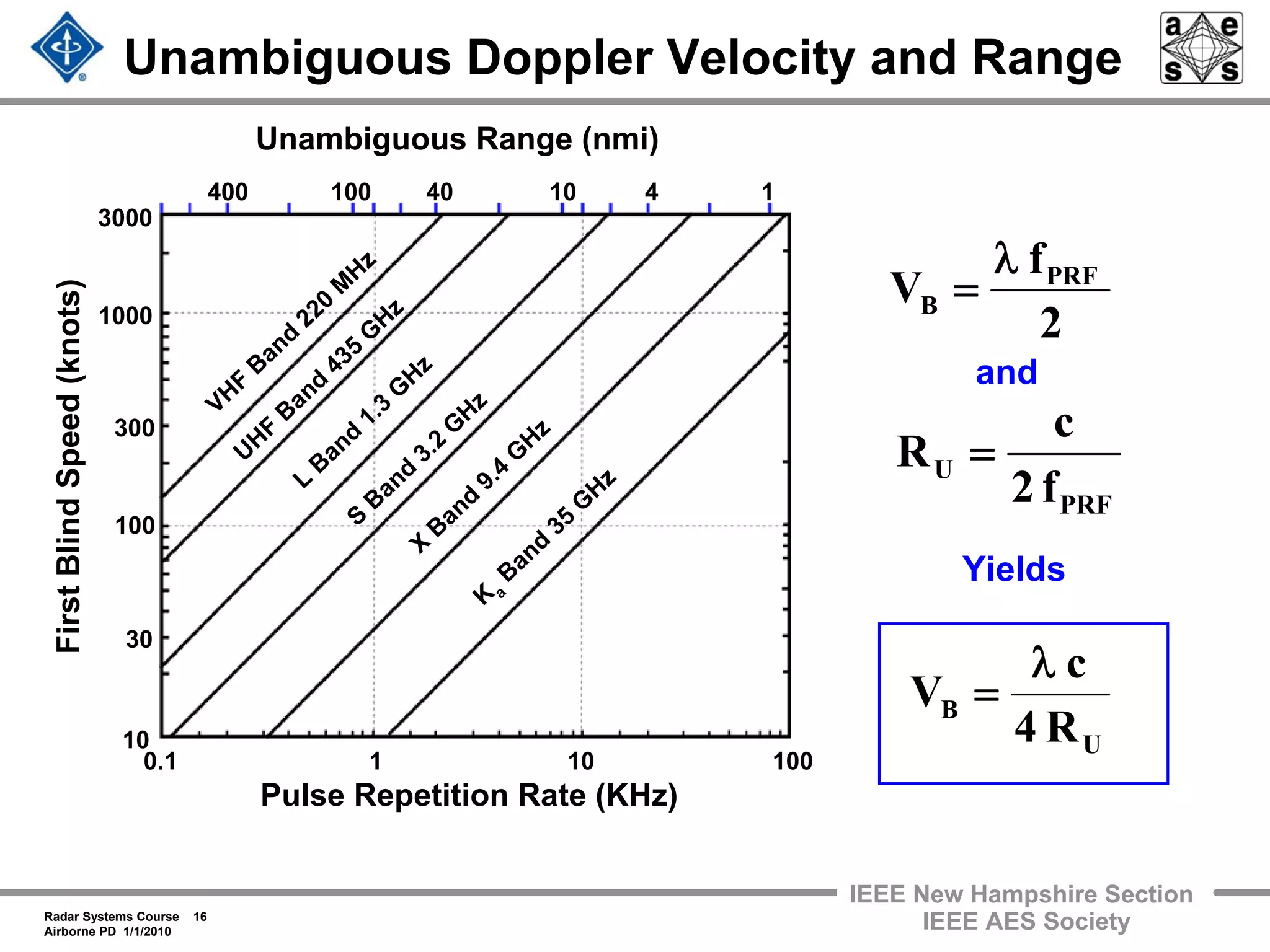
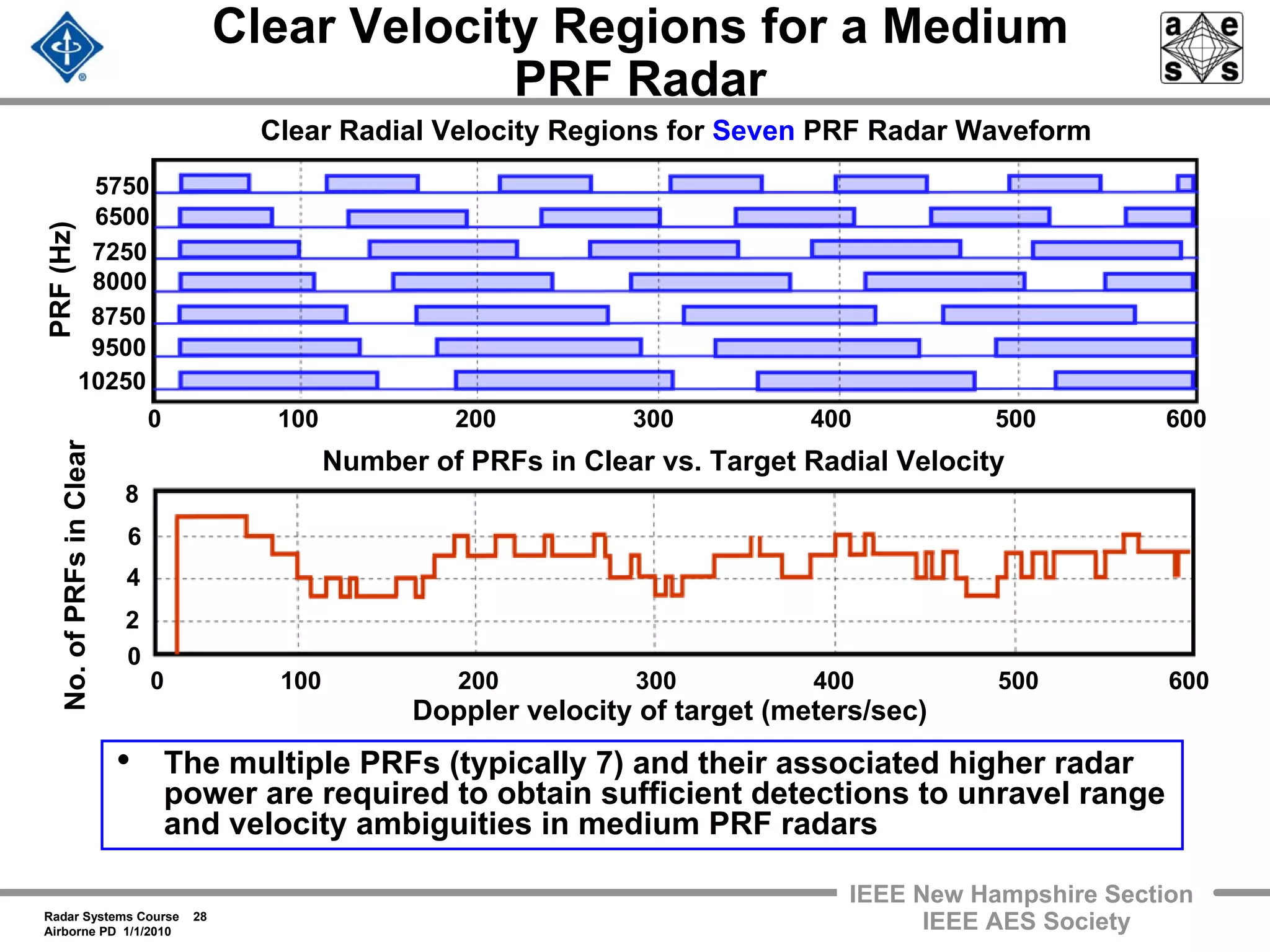
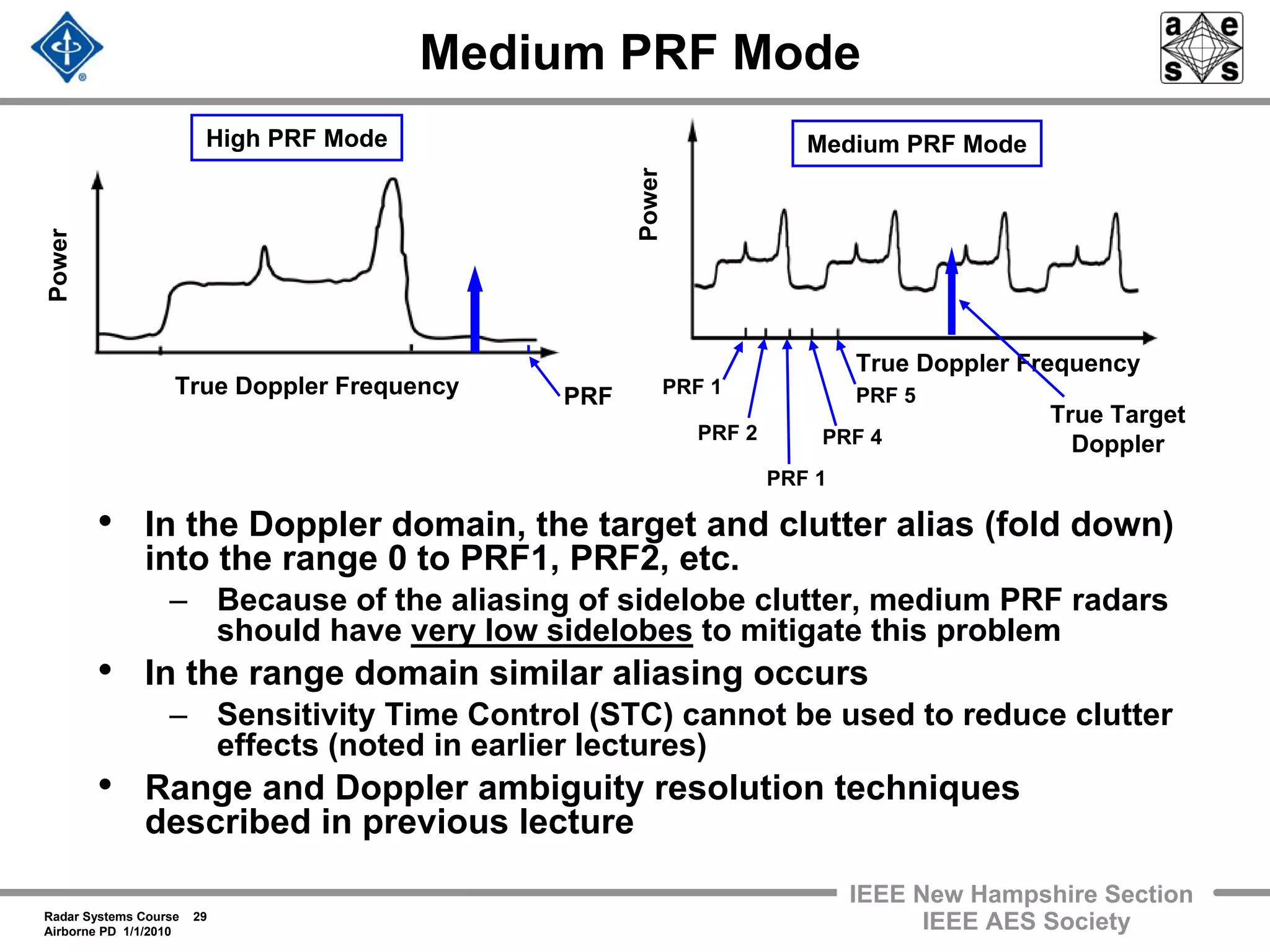
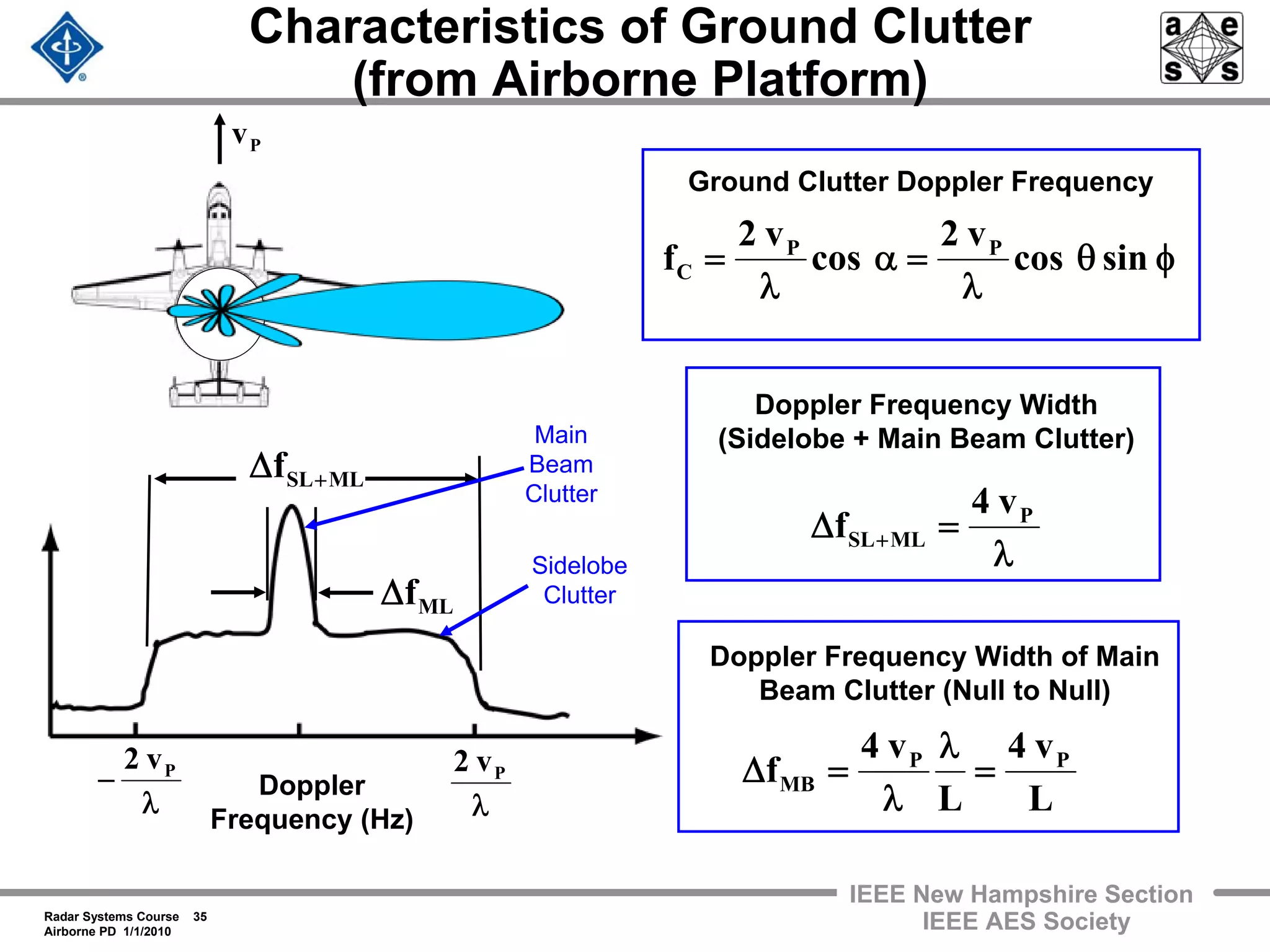
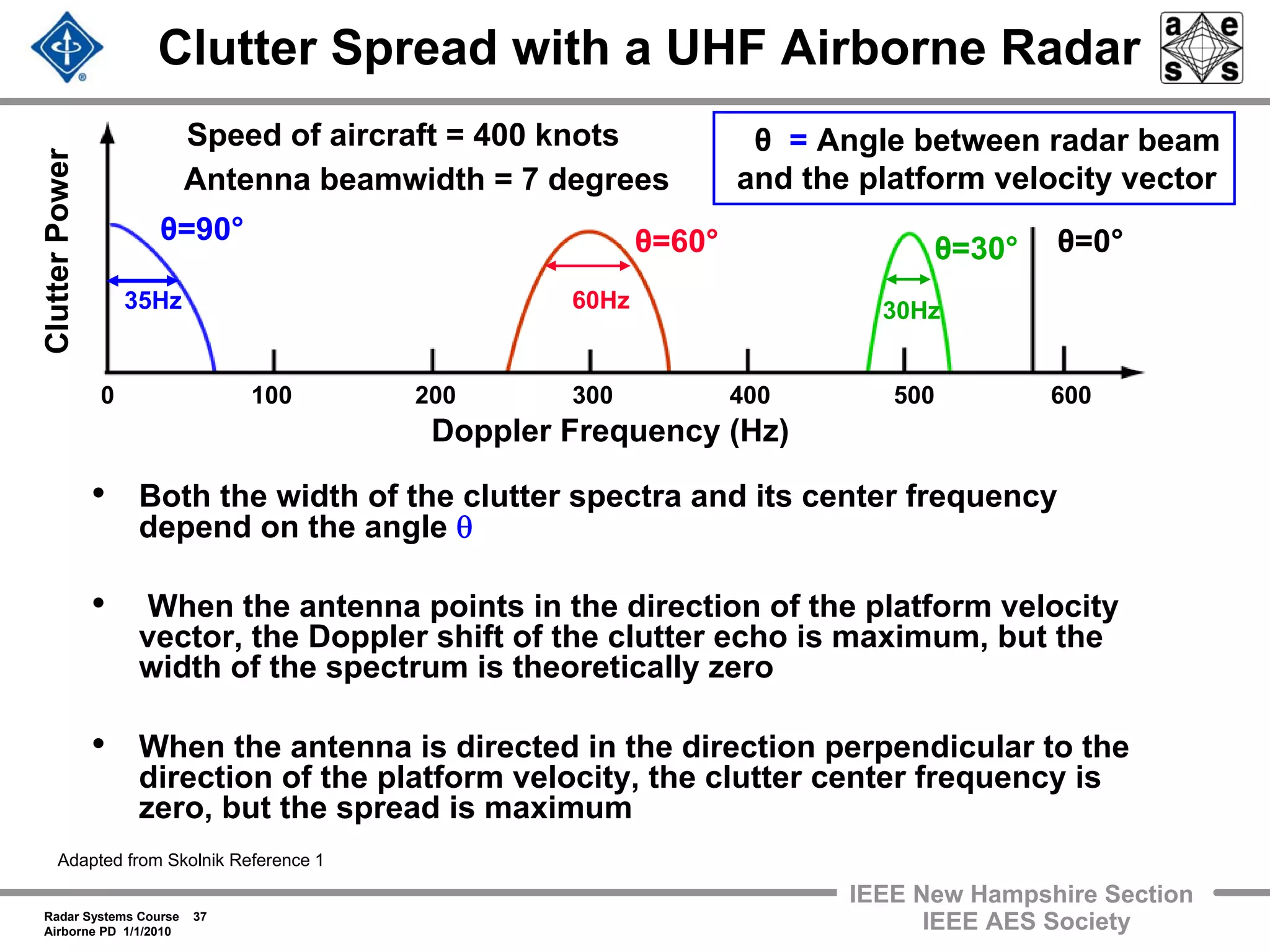
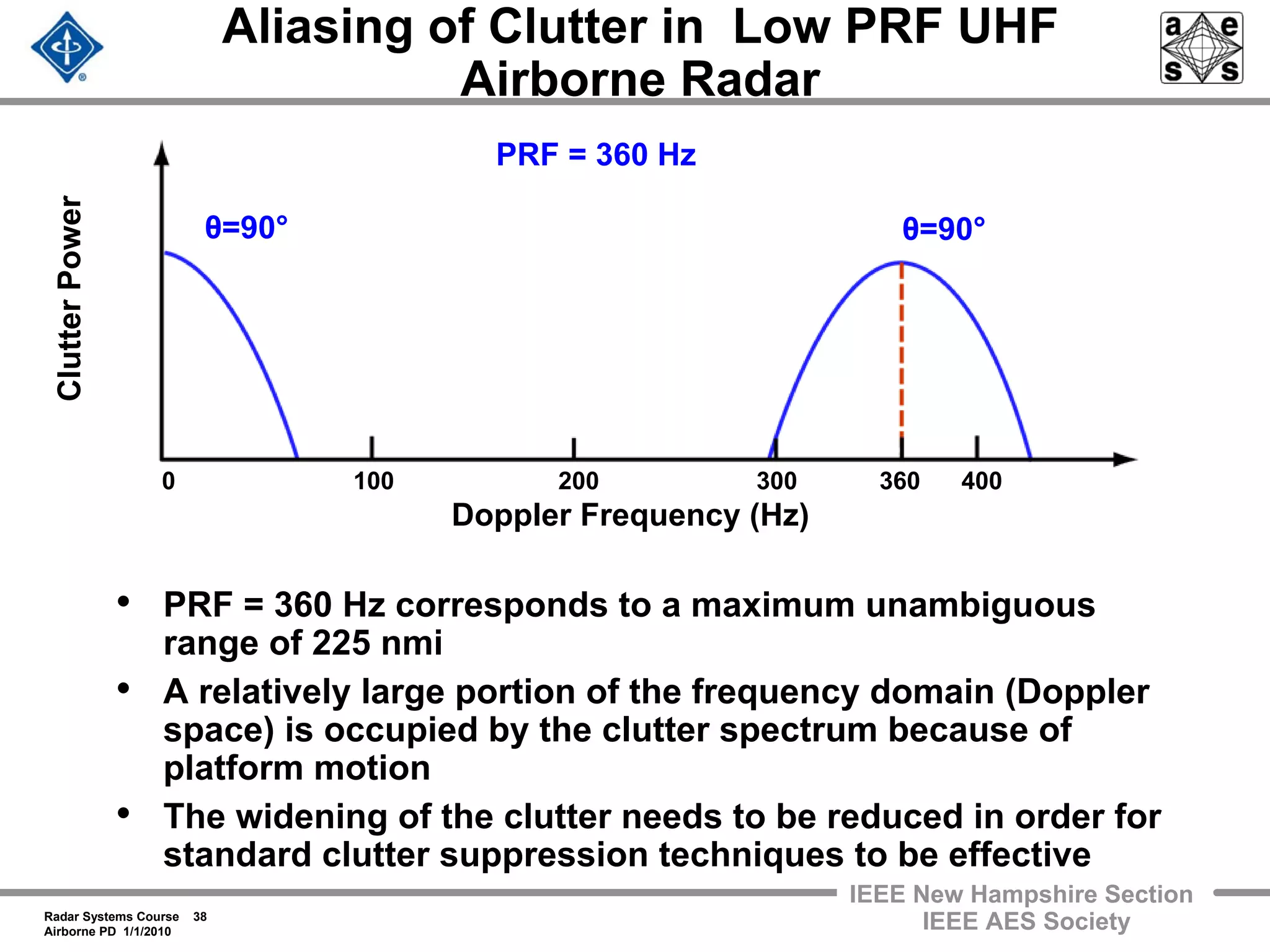
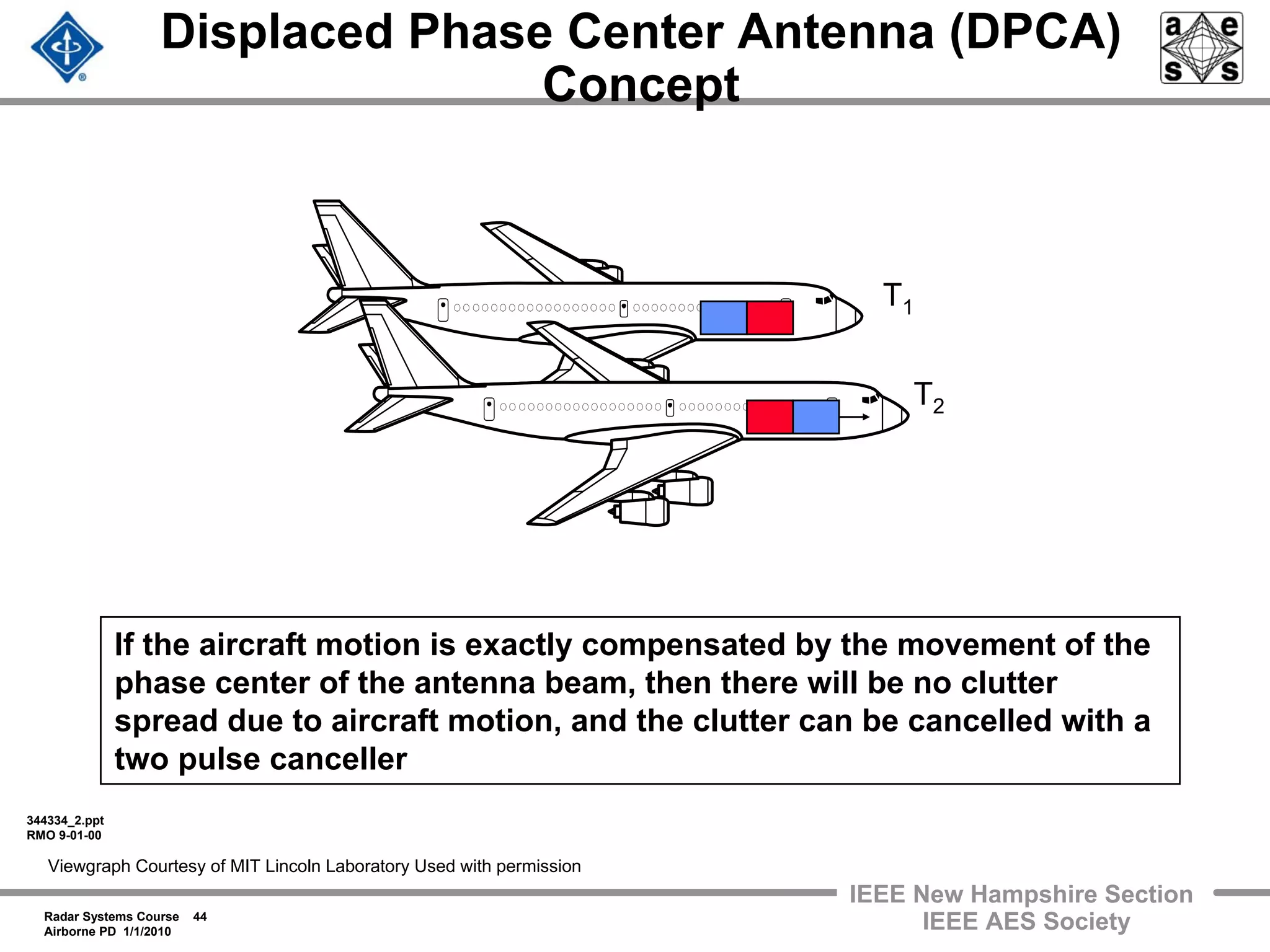
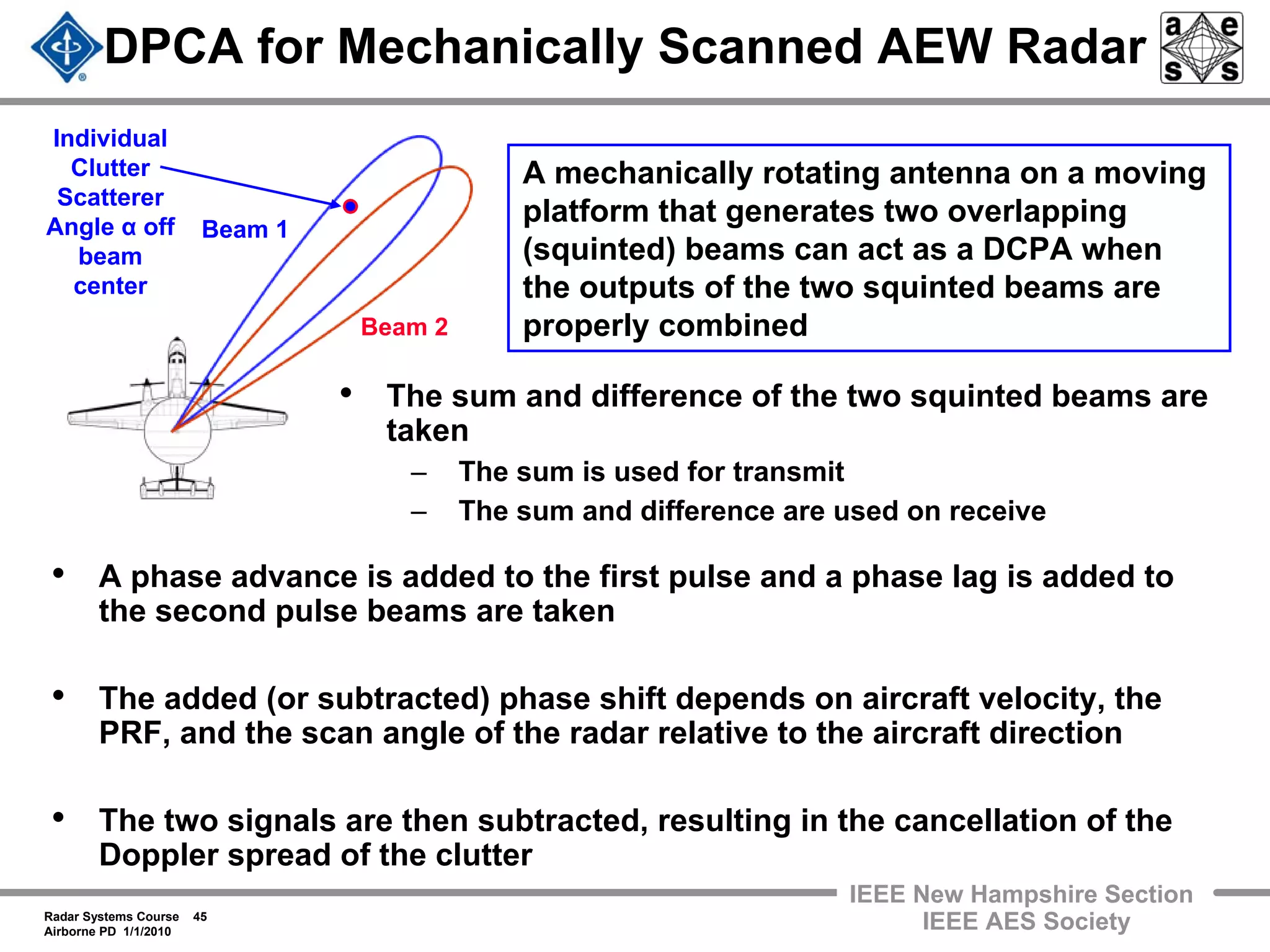
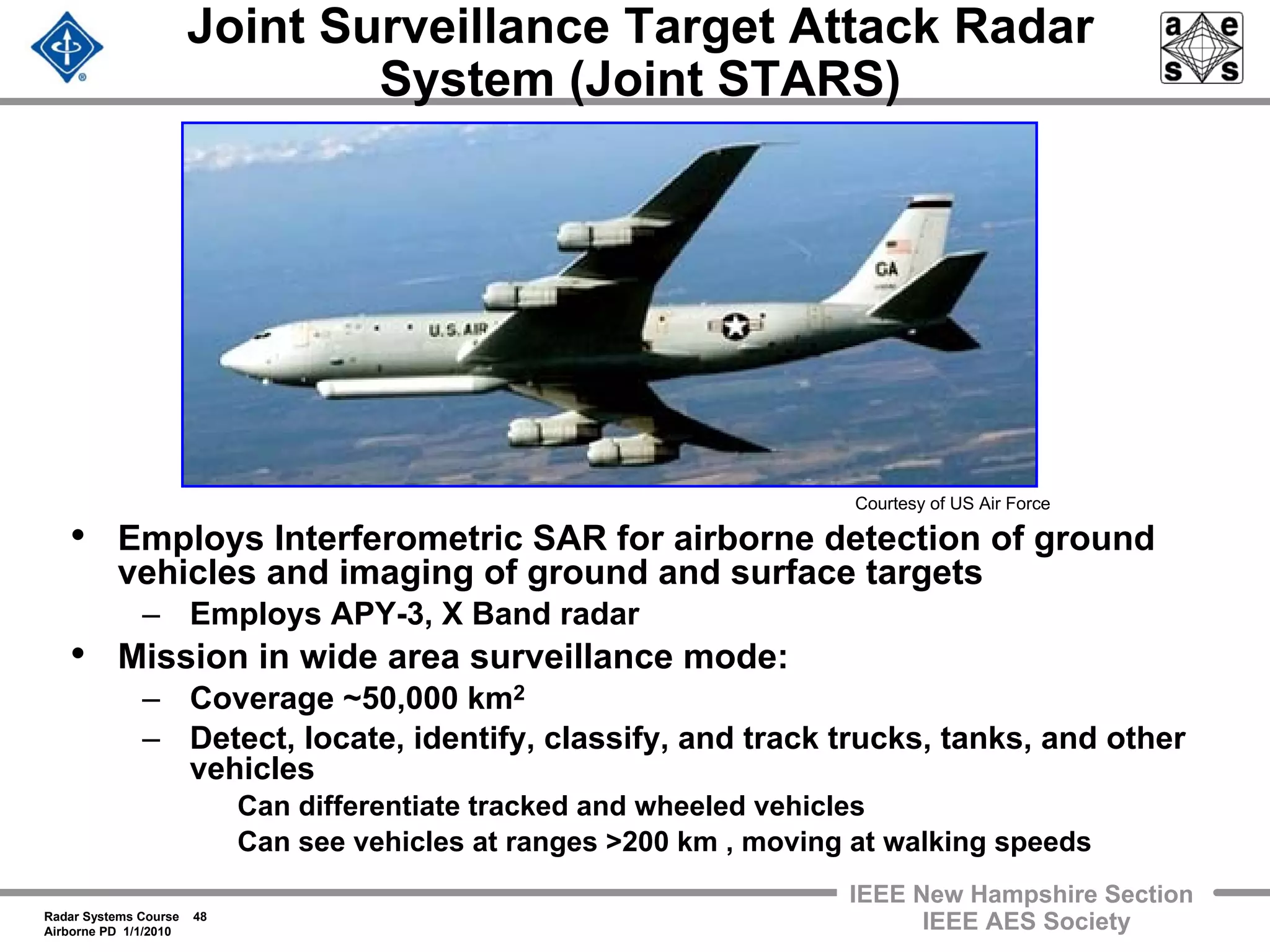
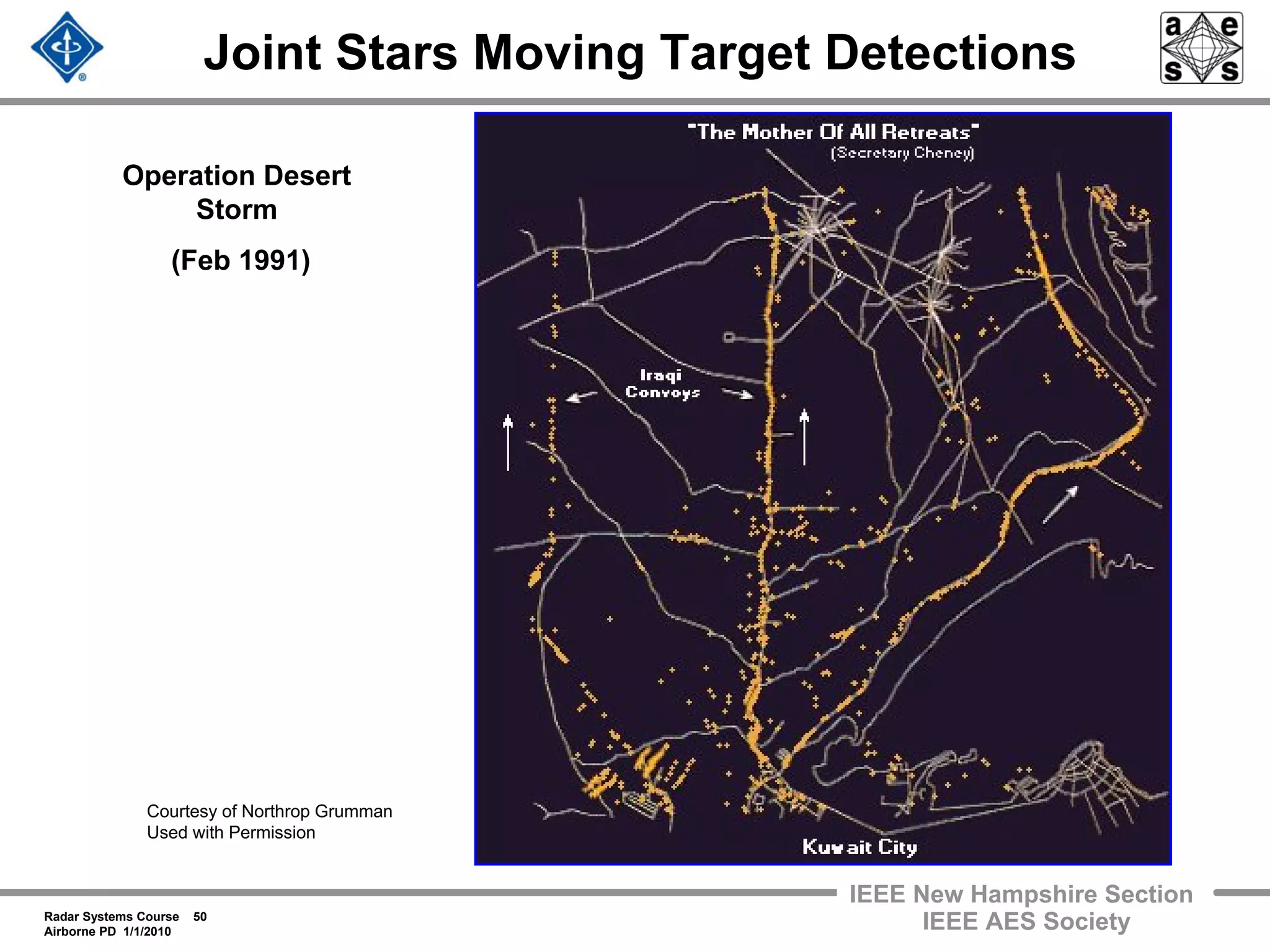
This document provides an overview of a lecture on airborne pulse Doppler radar systems. It discusses different airborne radar missions including fighter/interceptor radars like those used on F-16s and F-35s, as well as airborne early warning radars like AWACS. It covers topics like airborne radar clutter, pulse Doppler modes using different PRFs, and examples of military radars and their specifications. The goal is to explain the considerations and techniques involved in airborne pulse Doppler radar system design and operation.