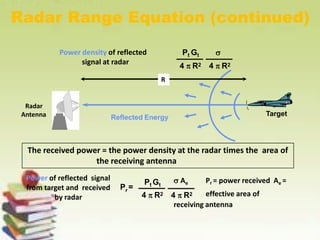
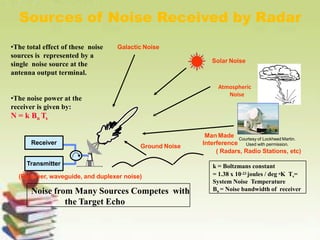
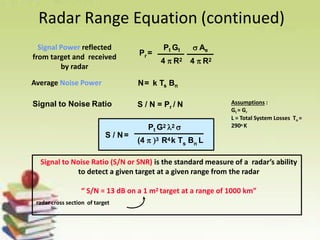
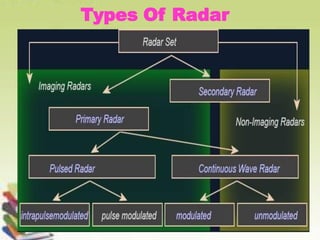
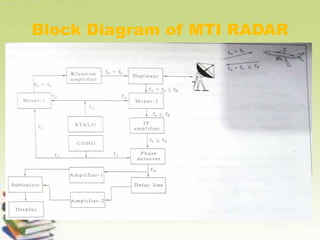
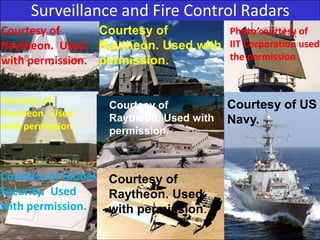
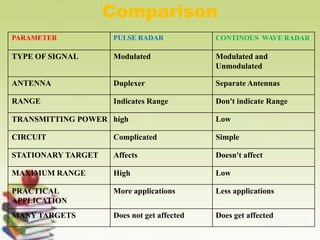
The document provides a comprehensive overview of radar systems, including their history, principles of operation, functions, and various applications. It explains the components of radar, such as transmitters, receivers, duplexers, and antennas, and covers different types of radar like pulse and continuous wave radar. Additionally, the document discusses radar terminology, functions, and issues such as noise sources and Doppler effects.