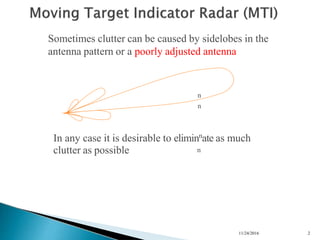
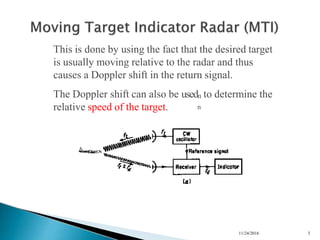
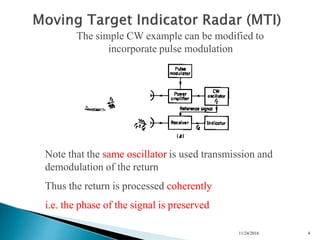
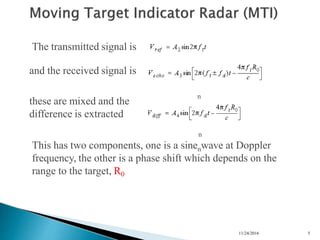
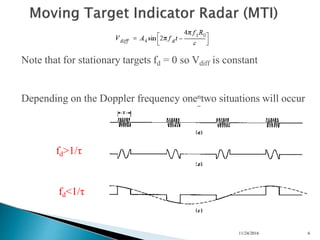
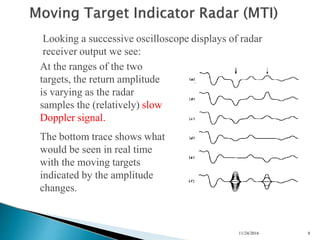
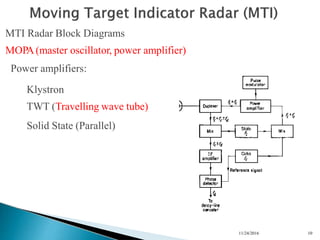
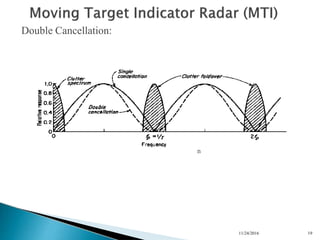
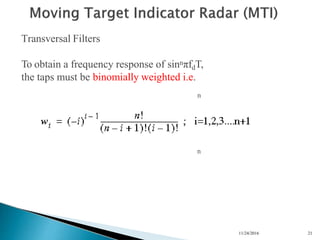
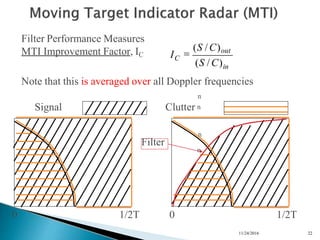
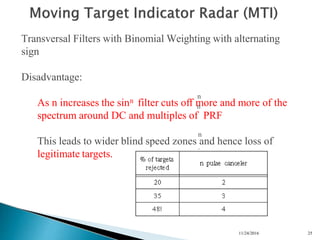
The document discusses radar clutter and techniques for eliminating it. It describes how clutter is unwanted radar targets that are not of interest. Doppler shift from moving targets can be used to distinguish targets from clutter. Pulse modulation and coherent demodulation preserves the phase of returning signals. Transversal filters with binomial weighting and alternating signs can sharply attenuate clutter while maximizing the clutter improvement factor, but may also cut off some legitimate target signals as the number of taps increases.