Downloaded 146 times
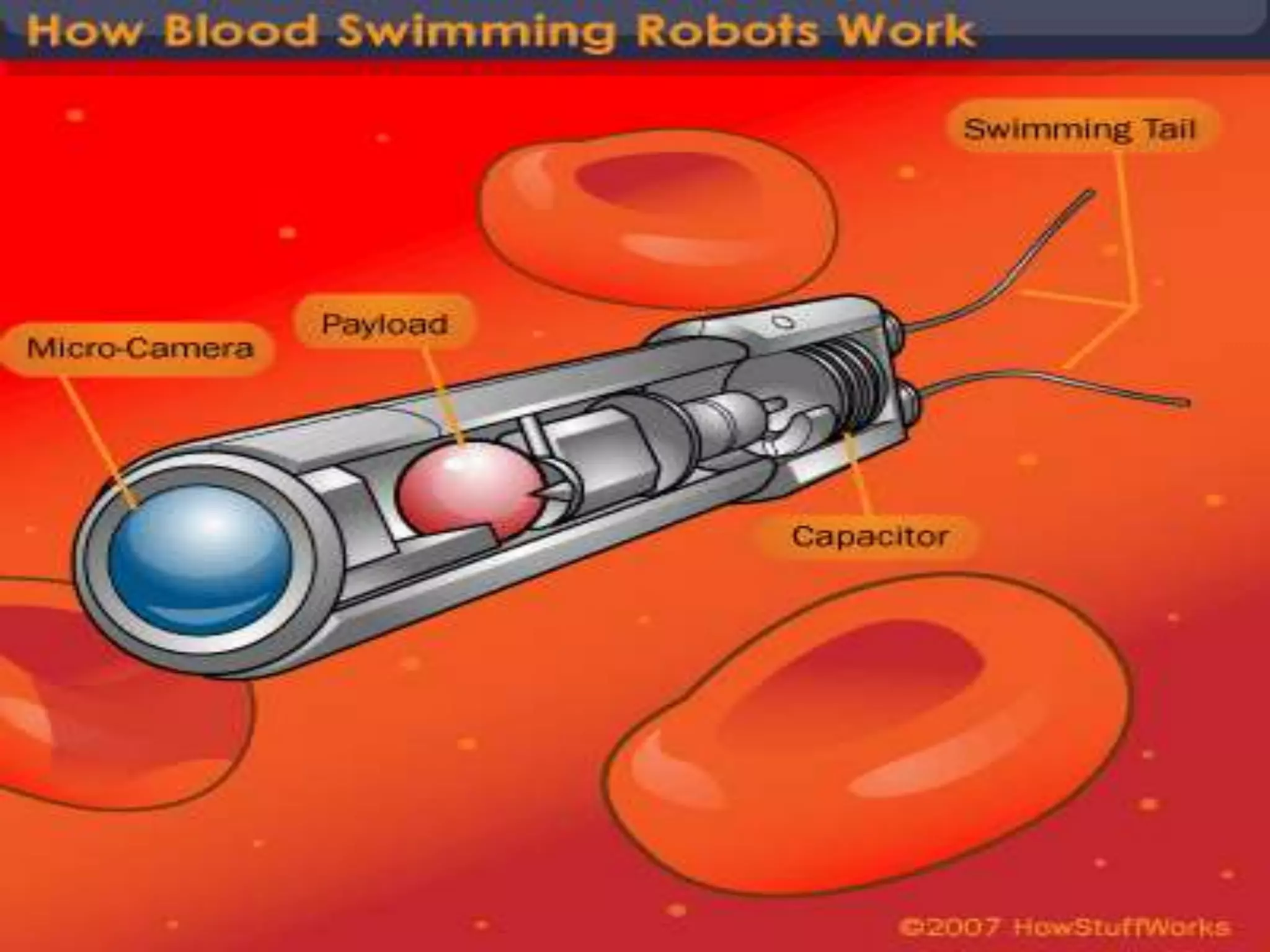

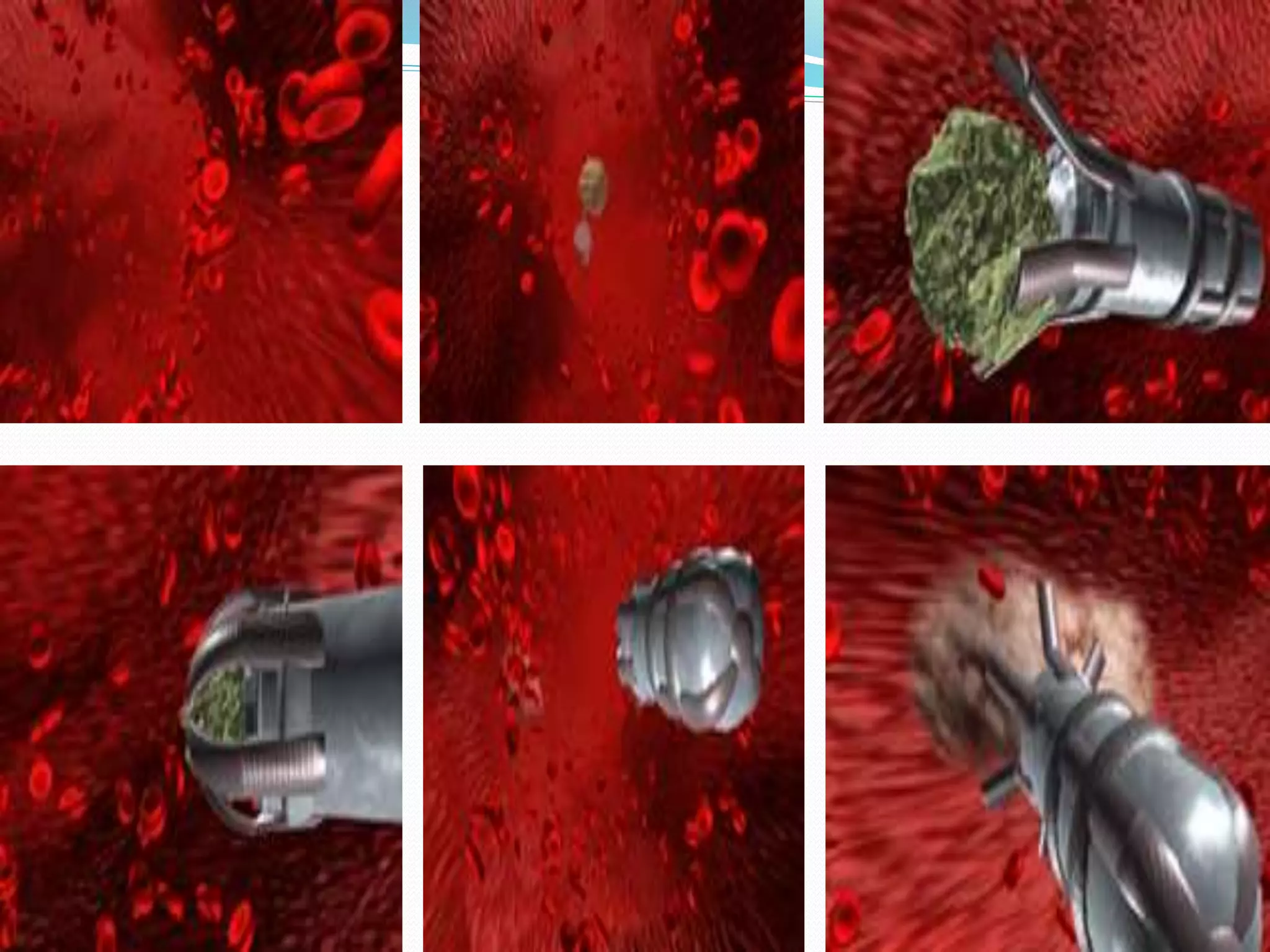

This document outlines a technical seminar presentation on nanorobots. It discusses how nanorobots could be used in nanomedicine, with sections covering their potential appearance and sizes, methods of control and navigation using external systems like magnetic fields, power sources using chemicals in blood, locomotion through vibrating or magnetic manipulation, applications like targeting cancer cells or breaking up stones, and a conclusion that nanorobots could eliminate diseases and extend human abilities.