Downloaded 11 times
![Objectives
Upon completion of this chapter, you will be able to:
1 Compare and contrast microprocessors and microcontrollers [1, 2]
2 Describe the advantages of microcontrollers for some applications
3 Explain the concept of embedded systems
4 Discuss the criteria for considering Microcontroller
5 Explain the variations of speed, packaging, memory and cost per unit
and how these affect choosing a Microcontroller
6 Compare and contrast the various members of the PIC family
7 Compare the PIC with microcontrollers offered by other manufactures.
6 / 71](https://image.slidesharecdn.com/microcontrollerpic16f877architectureandbasics-210701072438/75/Microcontroller-pic-16f877-architecture-and-basics-6-2048.jpg)

![Thank you
Please send your feedback at nbahadure@gmail.com
For download and more information [Click Here]
71 / 71](https://image.slidesharecdn.com/microcontrollerpic16f877architectureandbasics-210701072438/75/Microcontroller-pic-16f877-architecture-and-basics-71-2048.jpg)

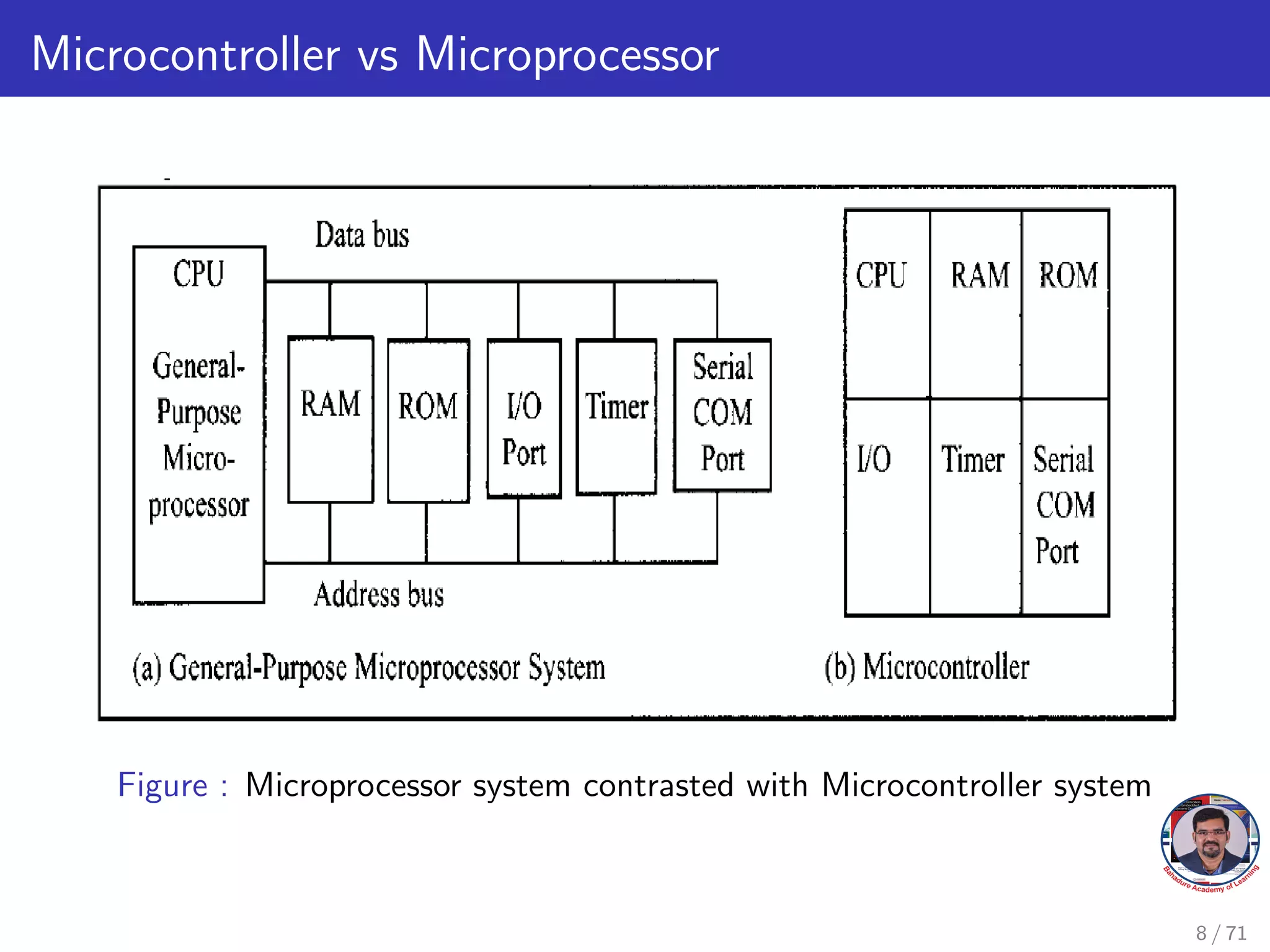
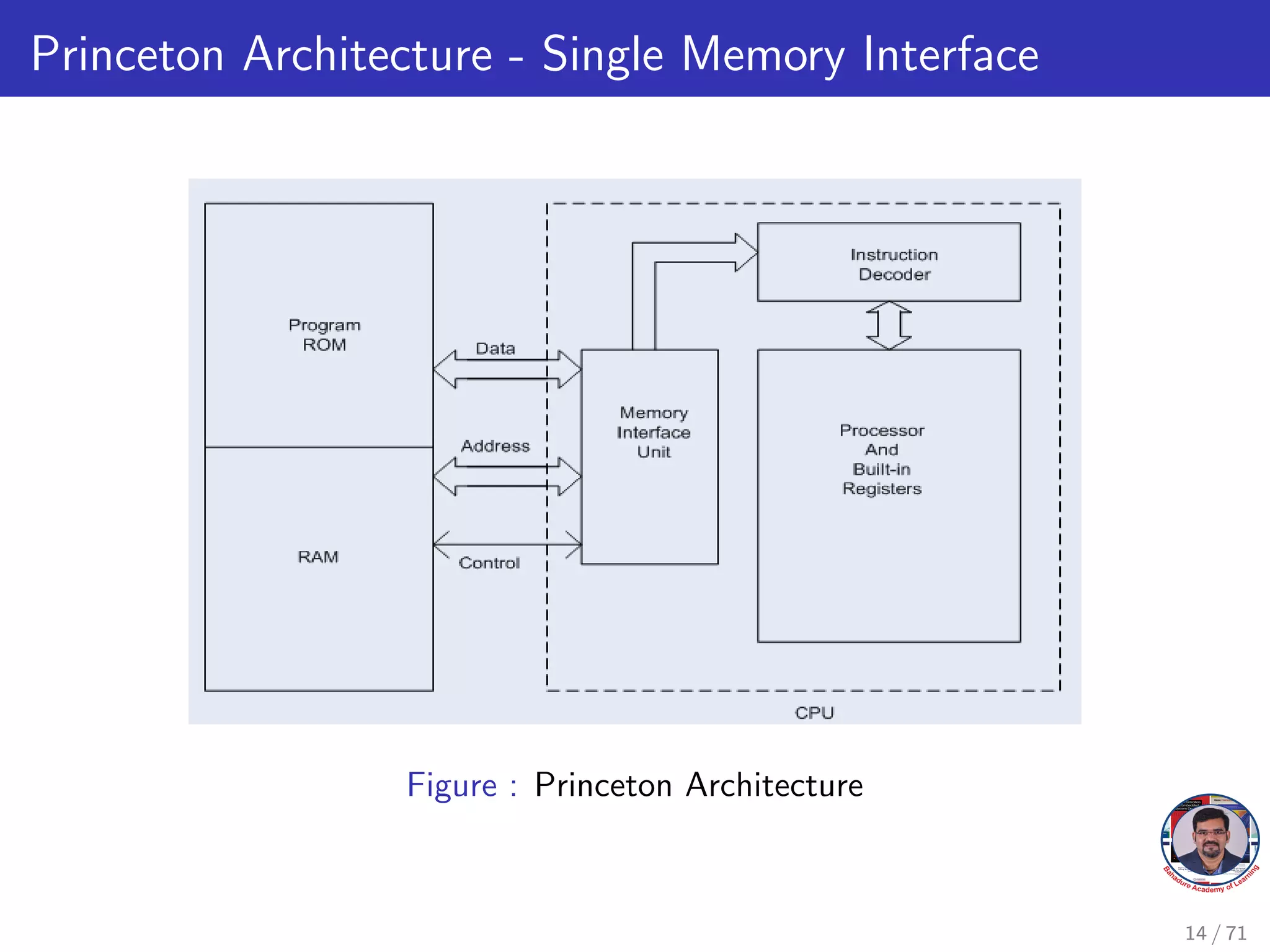
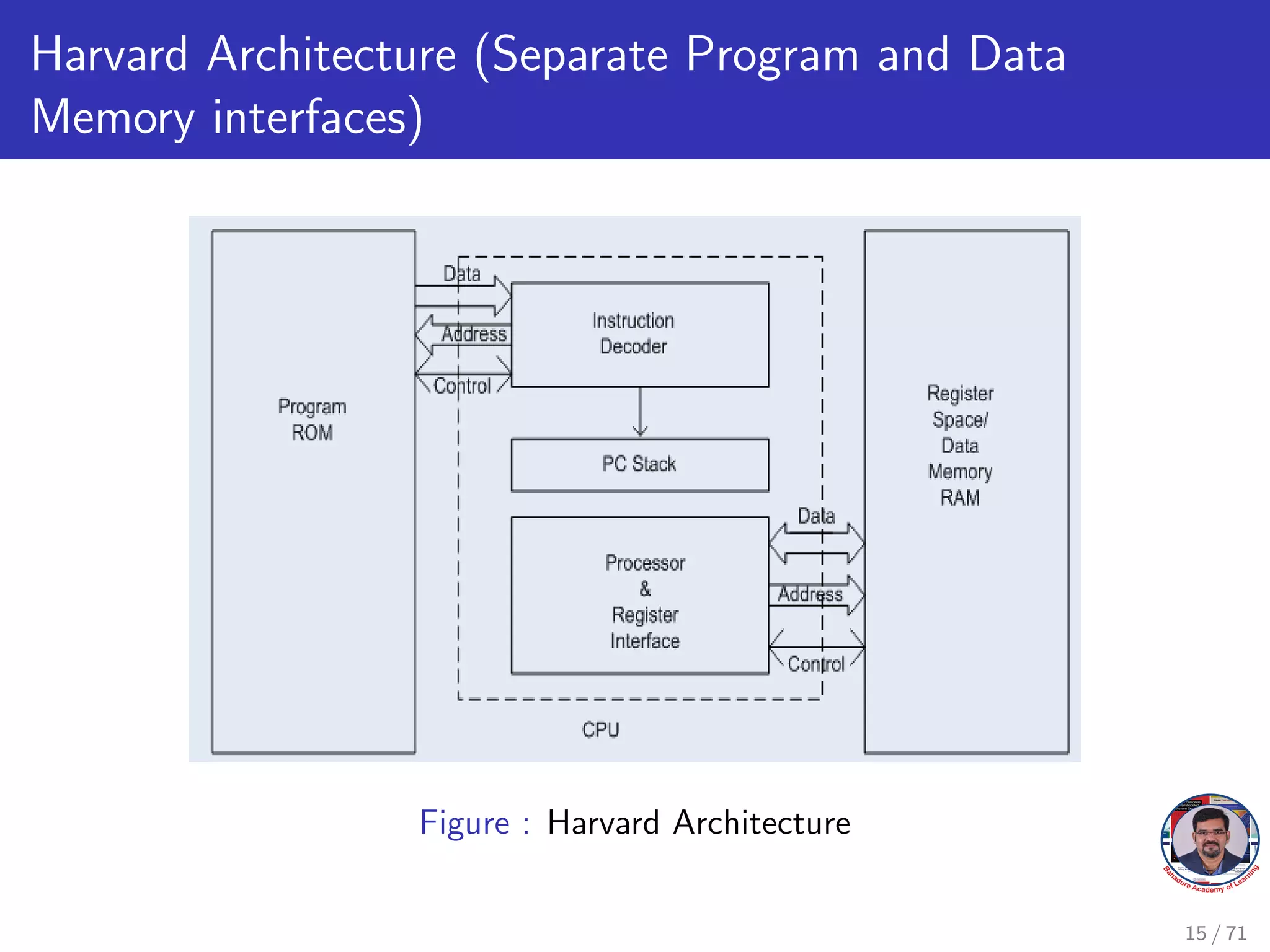
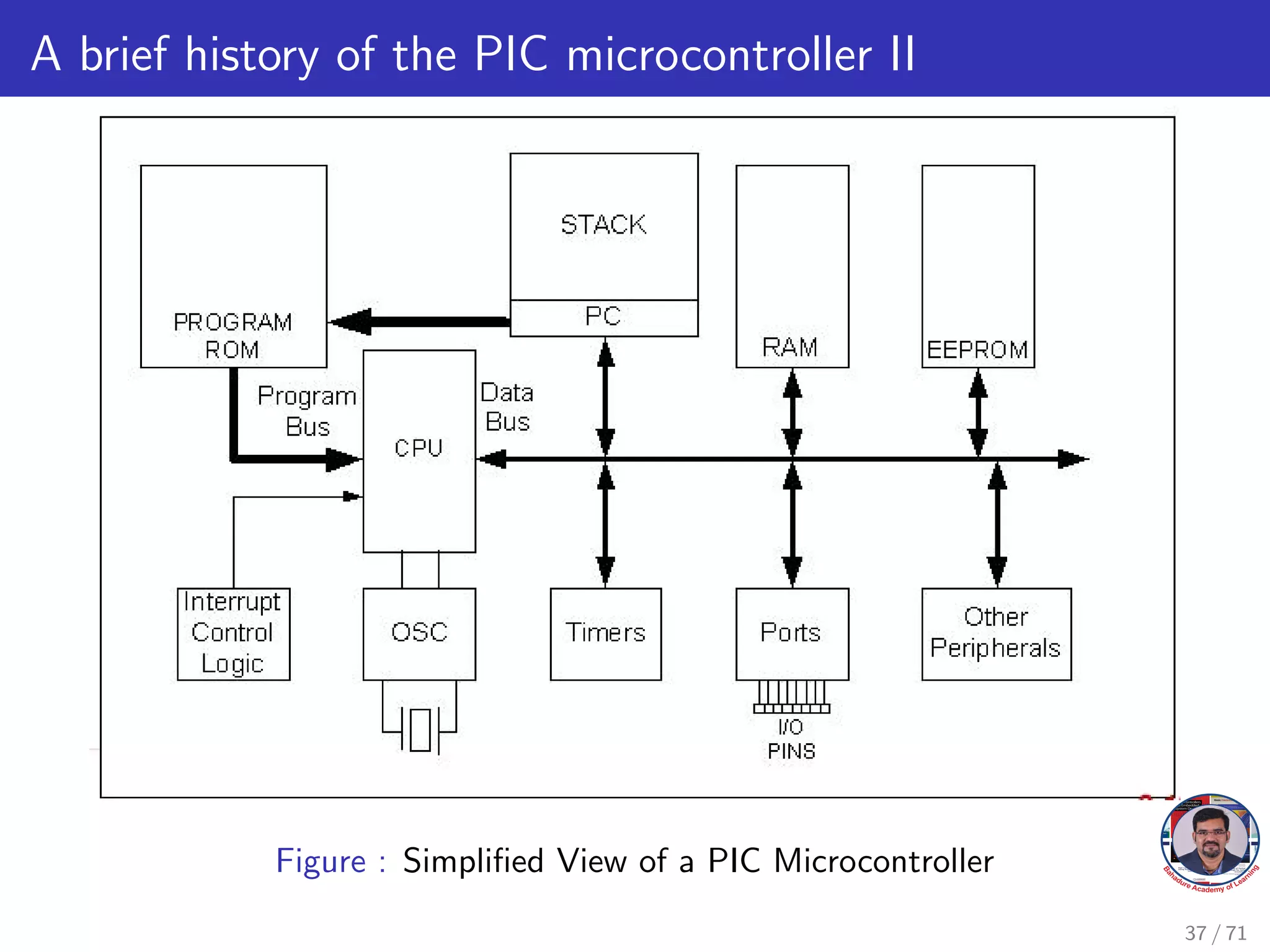
This document discusses the fundamentals of PIC microcontrollers, focusing on their architecture, features, and applications. It contrasts microcontrollers with microprocessors, highlighting the advantages of microcontrollers for embedded systems, and outlines various architectures such as Harvard and Princeton. Additionally, the document addresses RISC and CISC instruction sets and provides criteria for choosing a suitable microcontroller based on performance and development needs.