Downloaded 33 times

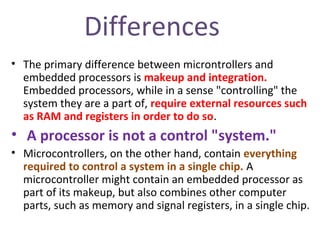
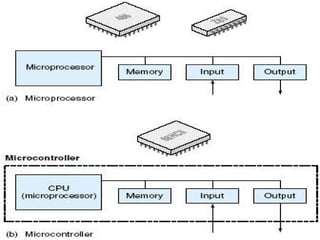
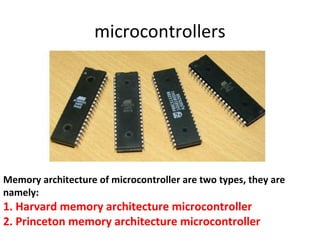

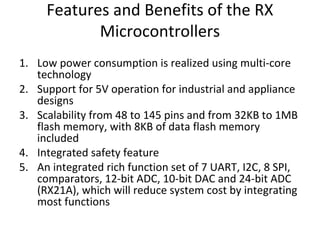
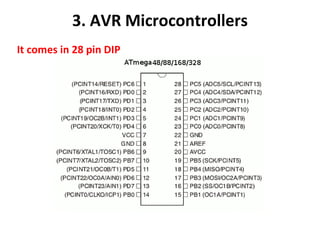
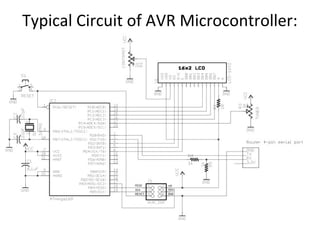

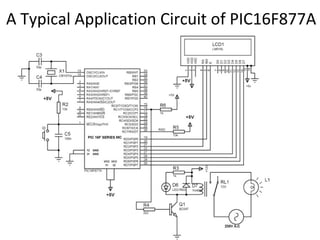
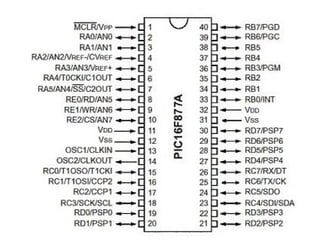
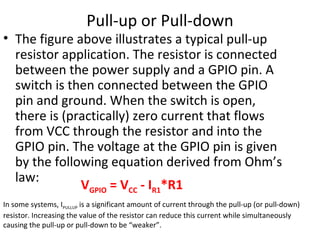
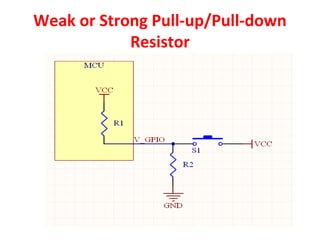
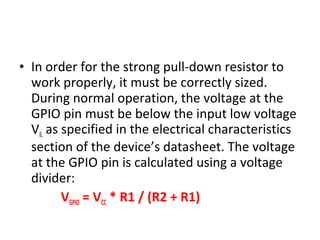

The document discusses different types of embedded system hardware components. It describes microcontrollers, their memory architectures, and four common types - 8051, Renesas, AVR, and PIC microcontrollers. It also discusses the differences between microcontrollers and embedded processors. Pull-up and pull-down resistors are explained as a way to prevent microcontroller GPIO pins from assuming undefined states, and their use in embedded designs. Examples of embedded systems include mobile phones, automotive electronics, RFID, wireless sensor networks, robotics, and biomedical applications.







































![Human presence detection based room light controller using pir2.pptx [repaired]](https://cdn.slidesharecdn.com/ss_thumbnails/humanpresencedetectionbasedroomlightcontrollerusingpir2-160418083434-thumbnail.jpg?width=640&height=640&fit=bounds)


































































