Downloaded 58 times
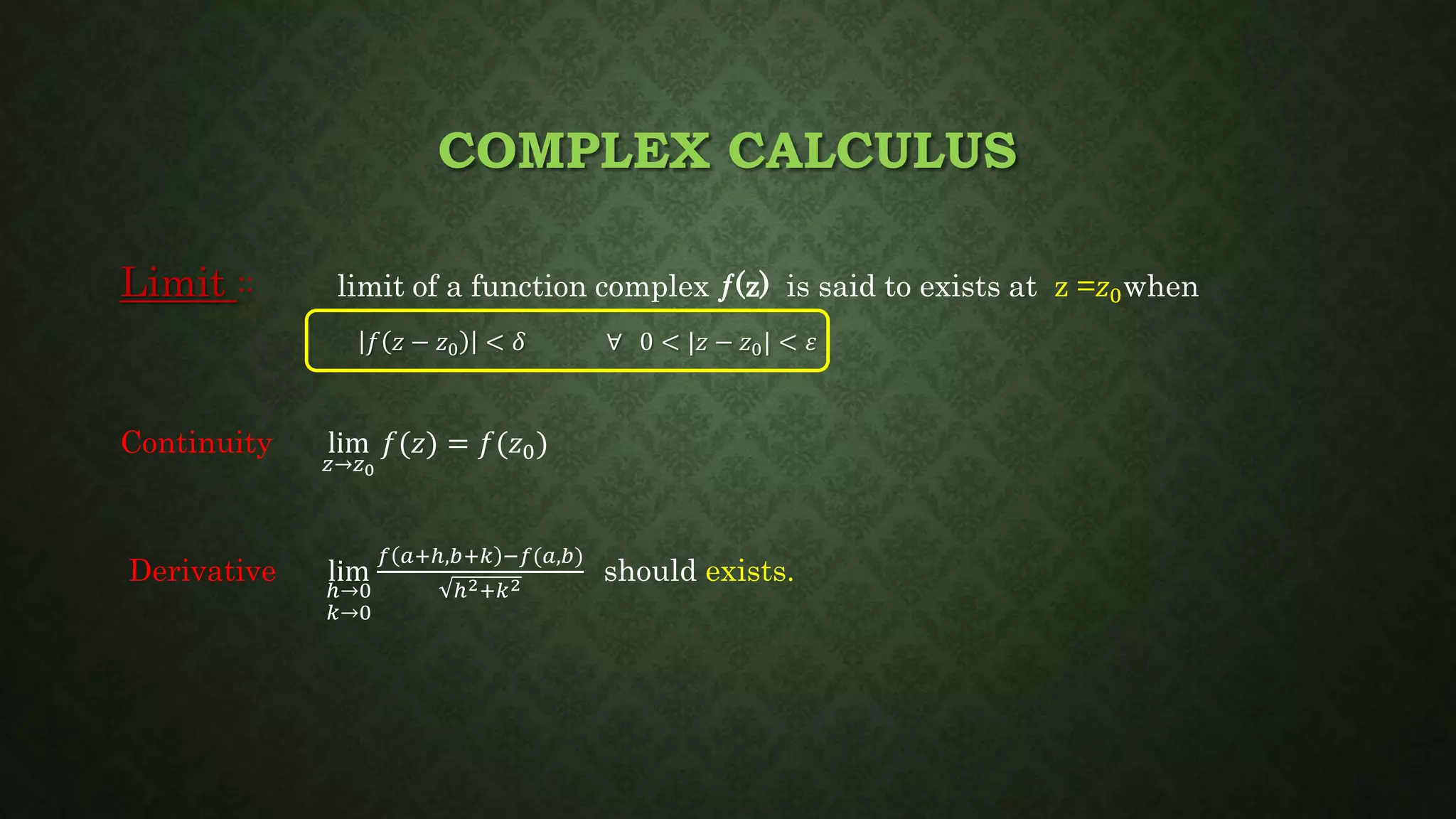
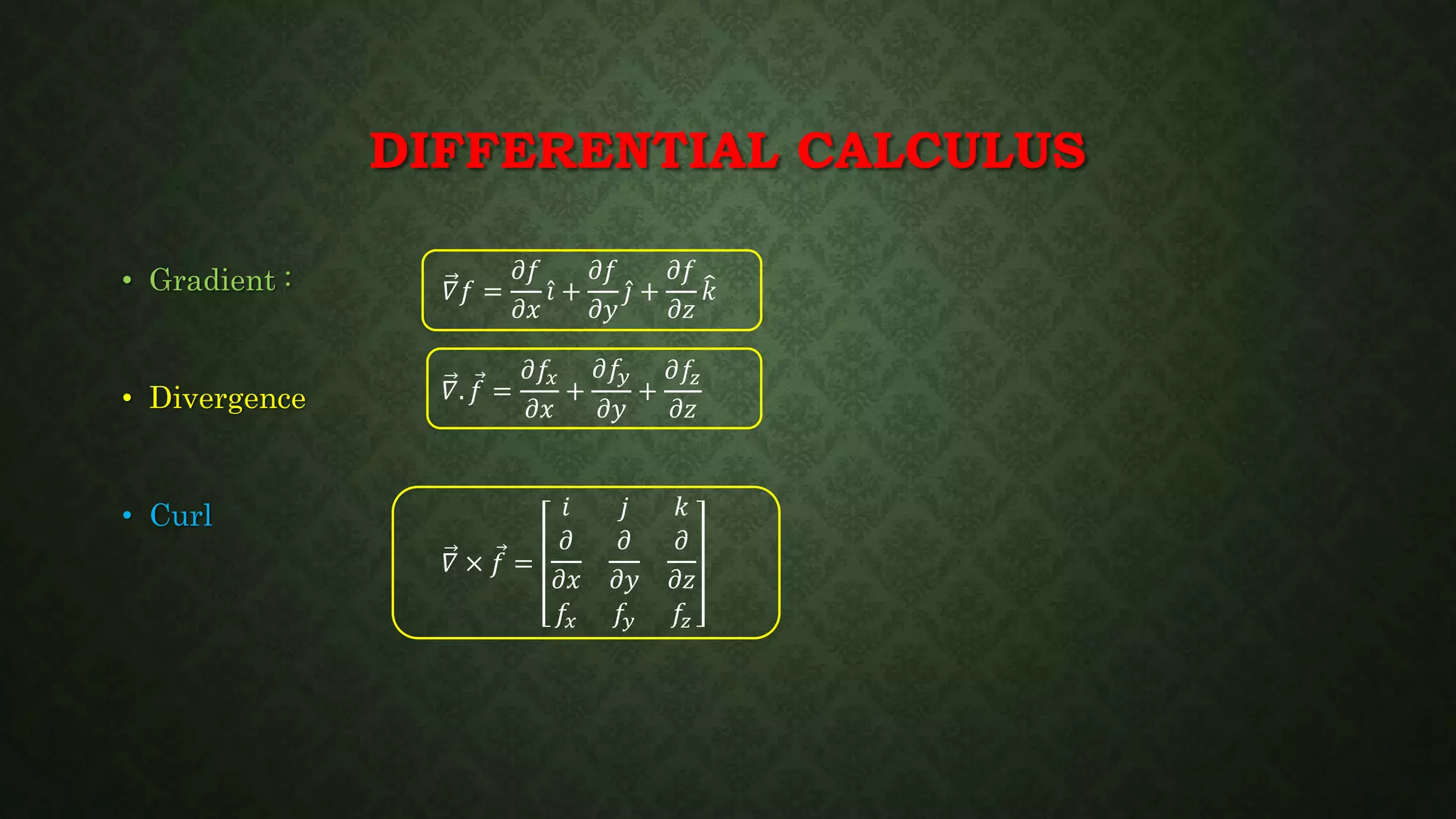
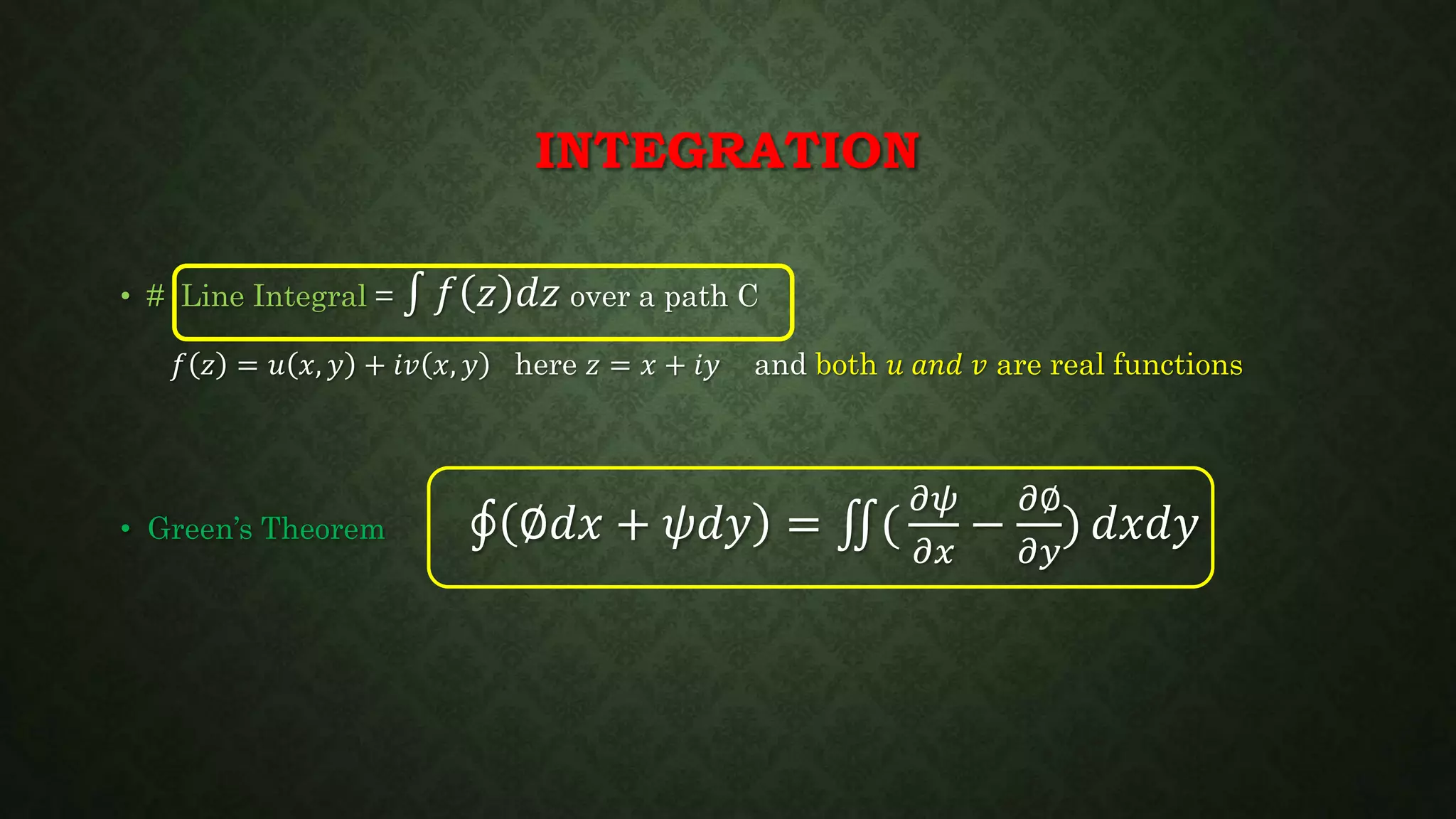
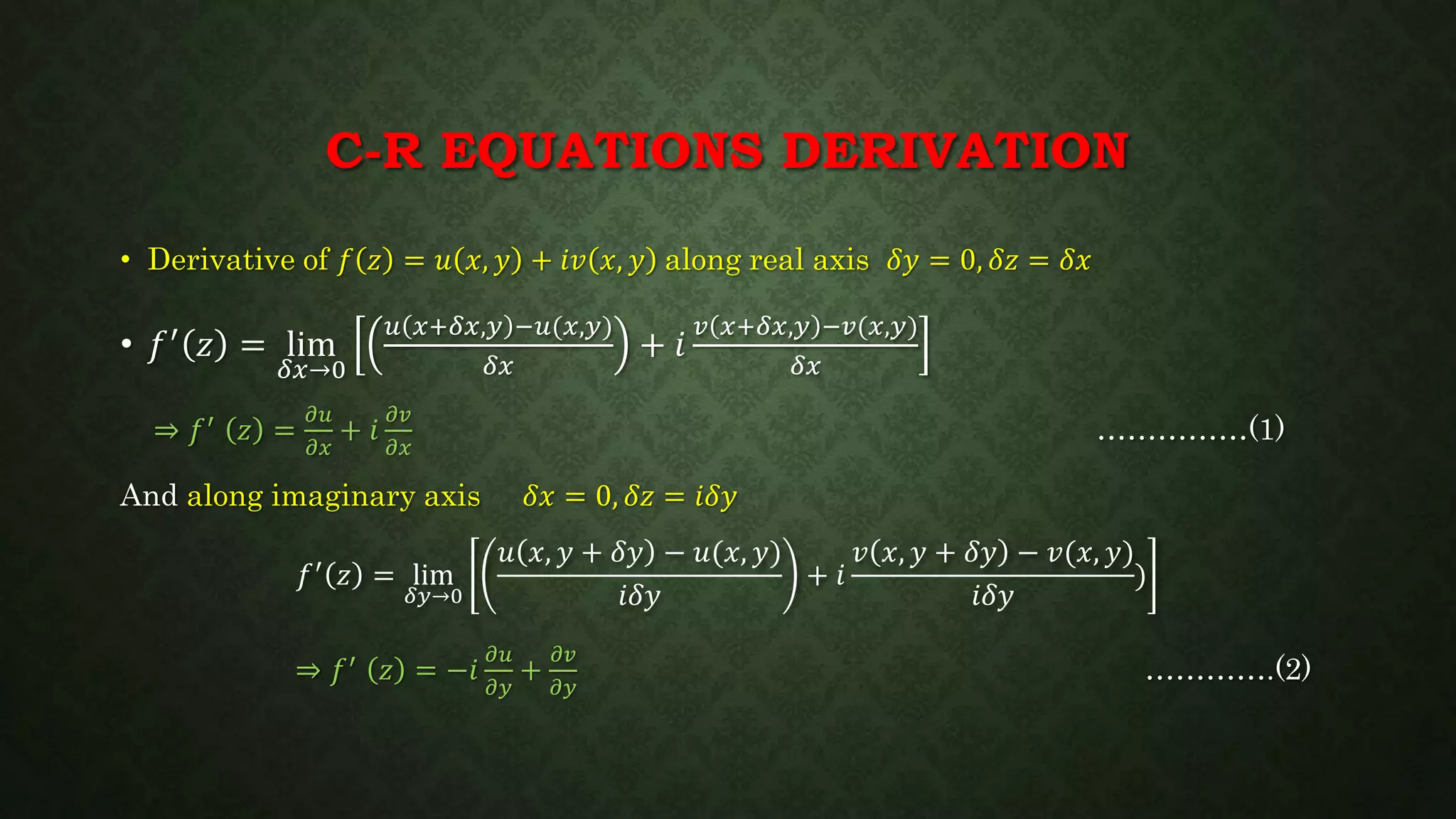
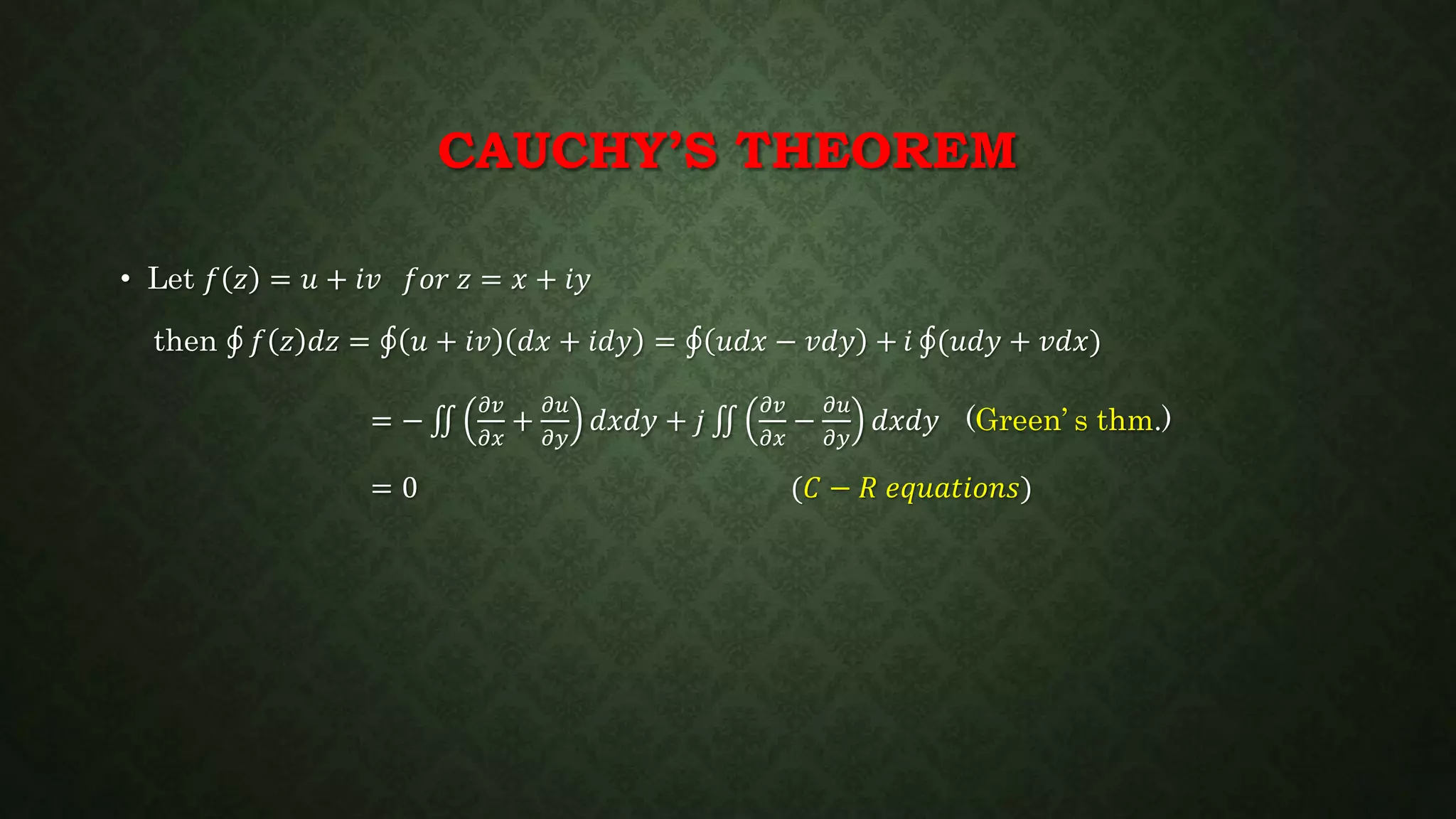
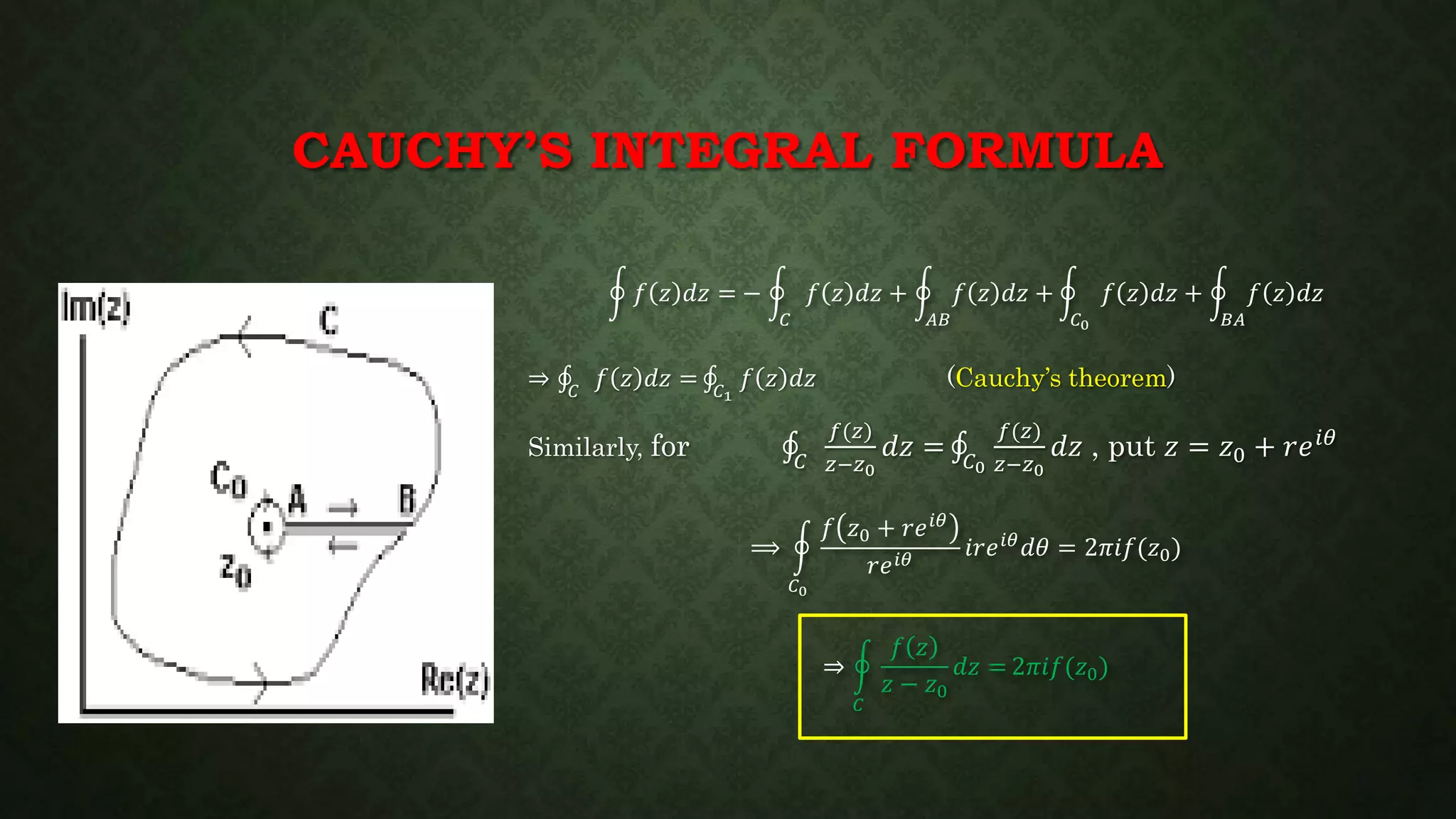
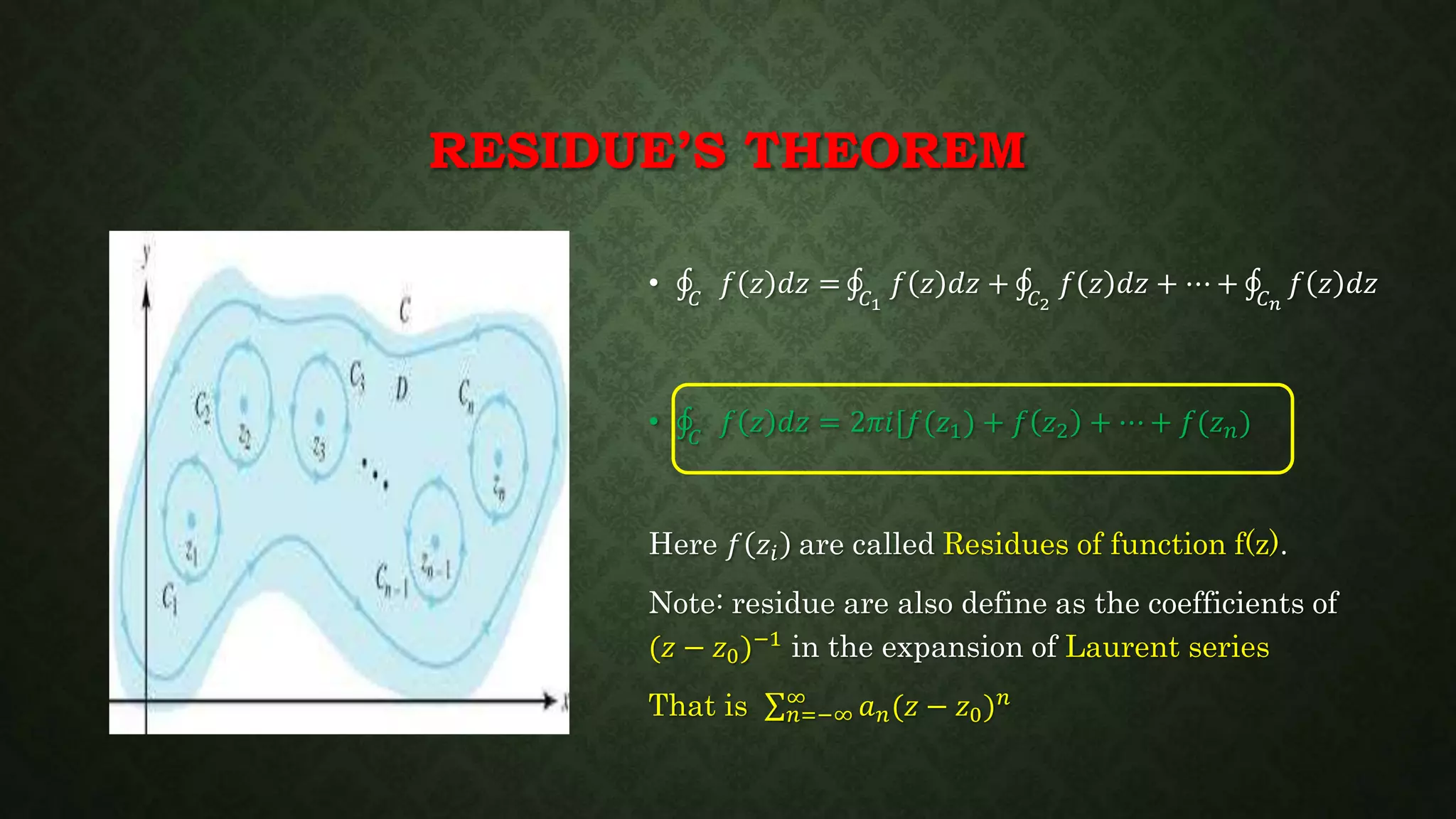
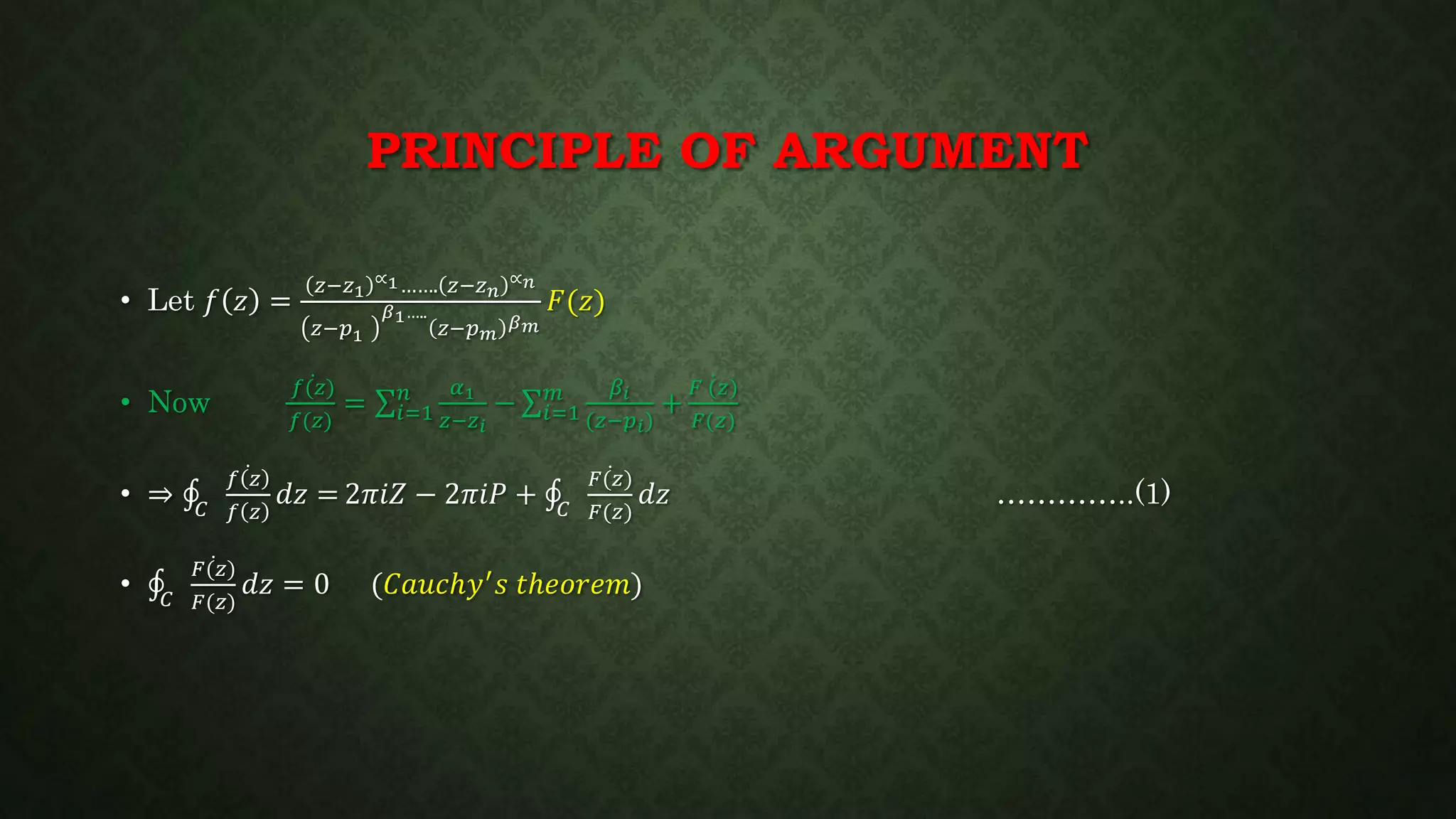
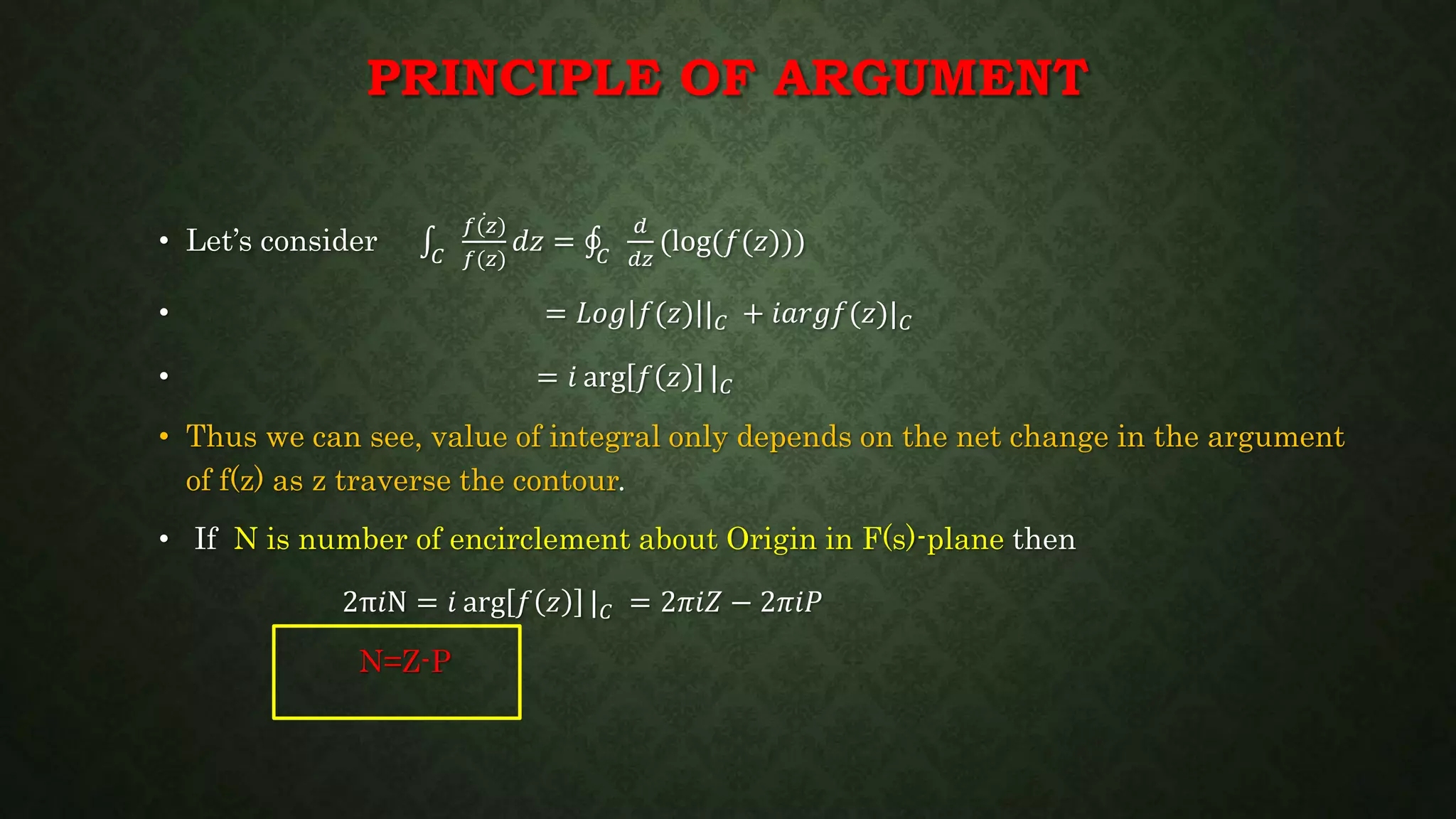
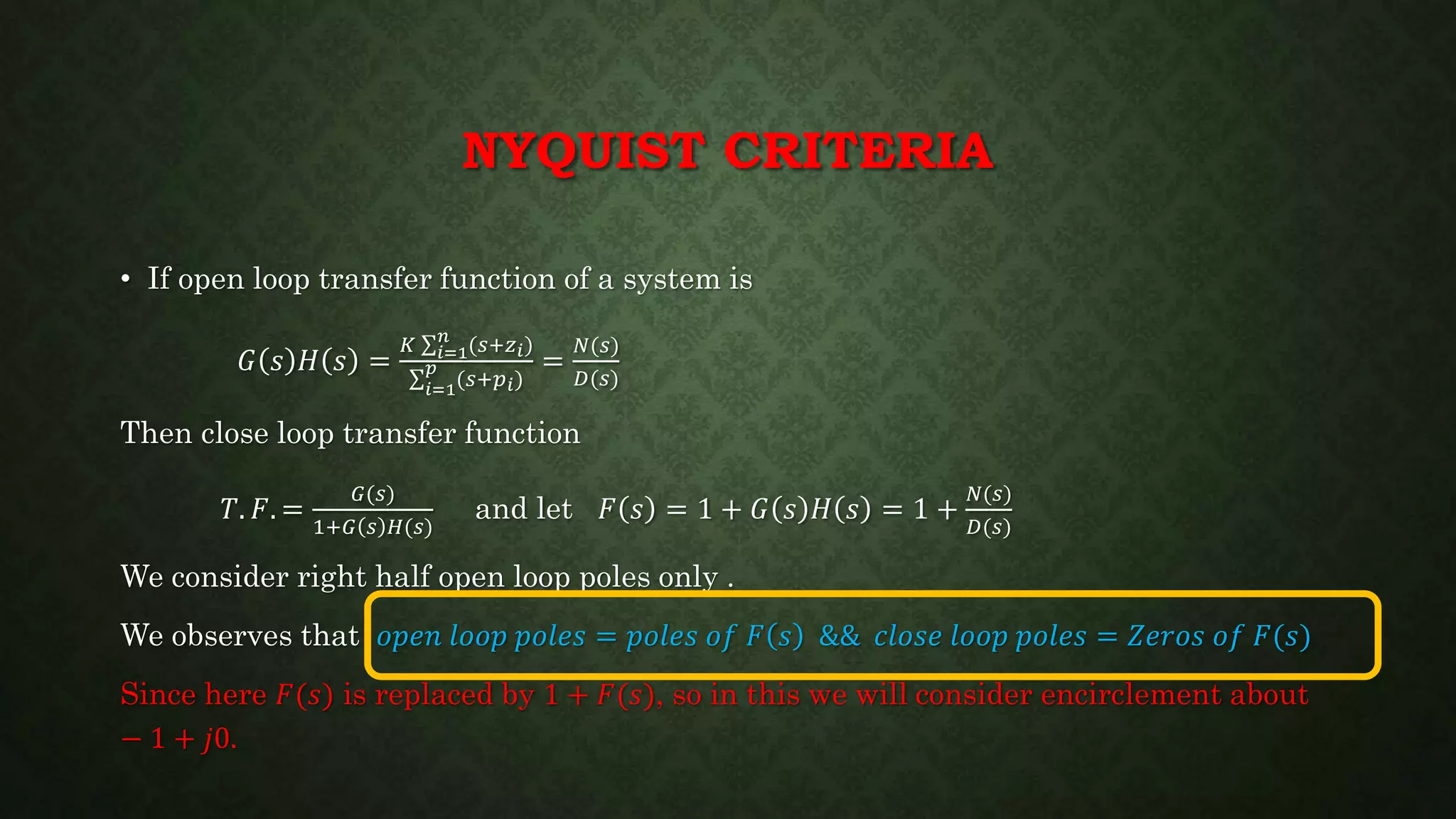
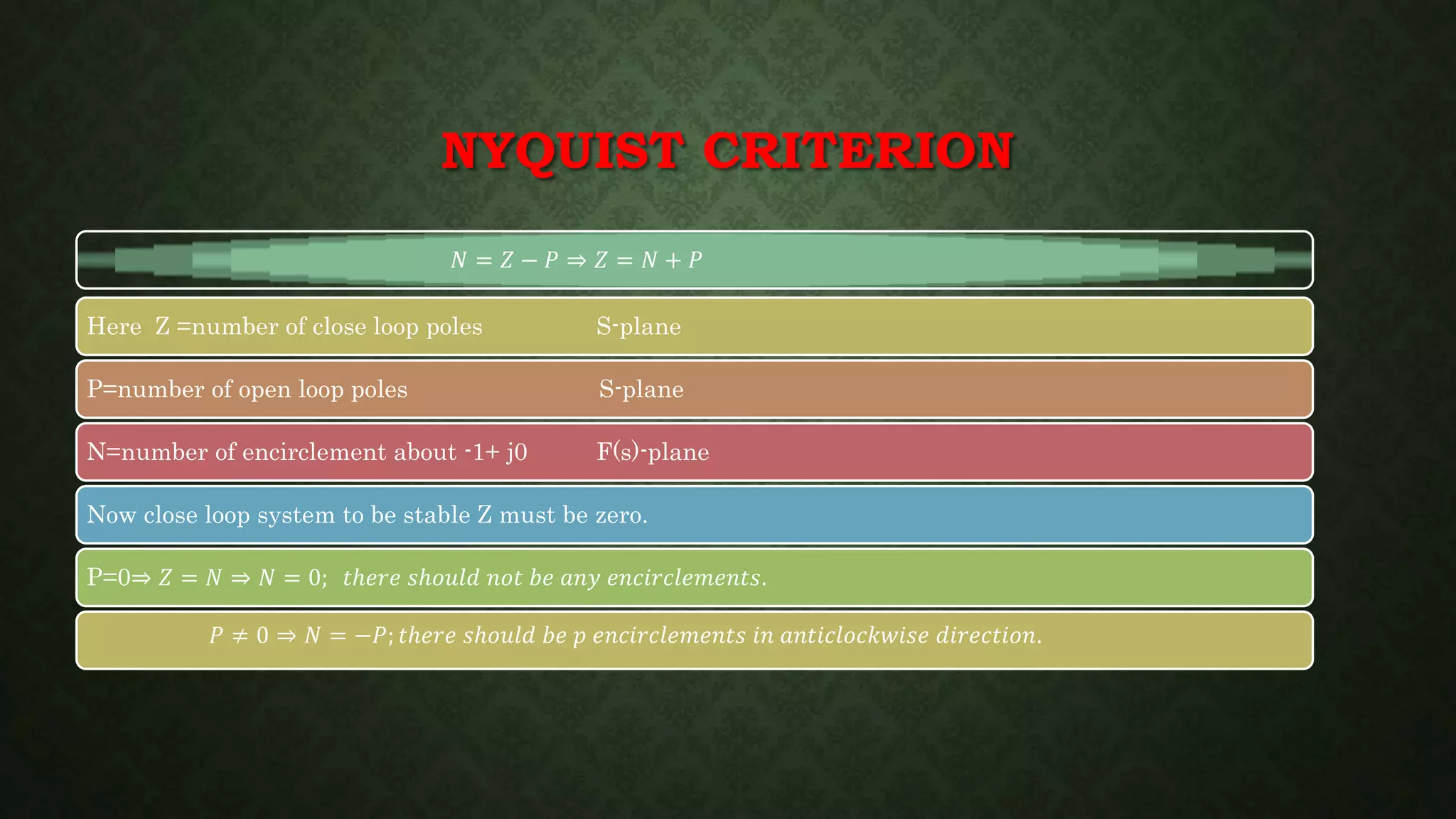
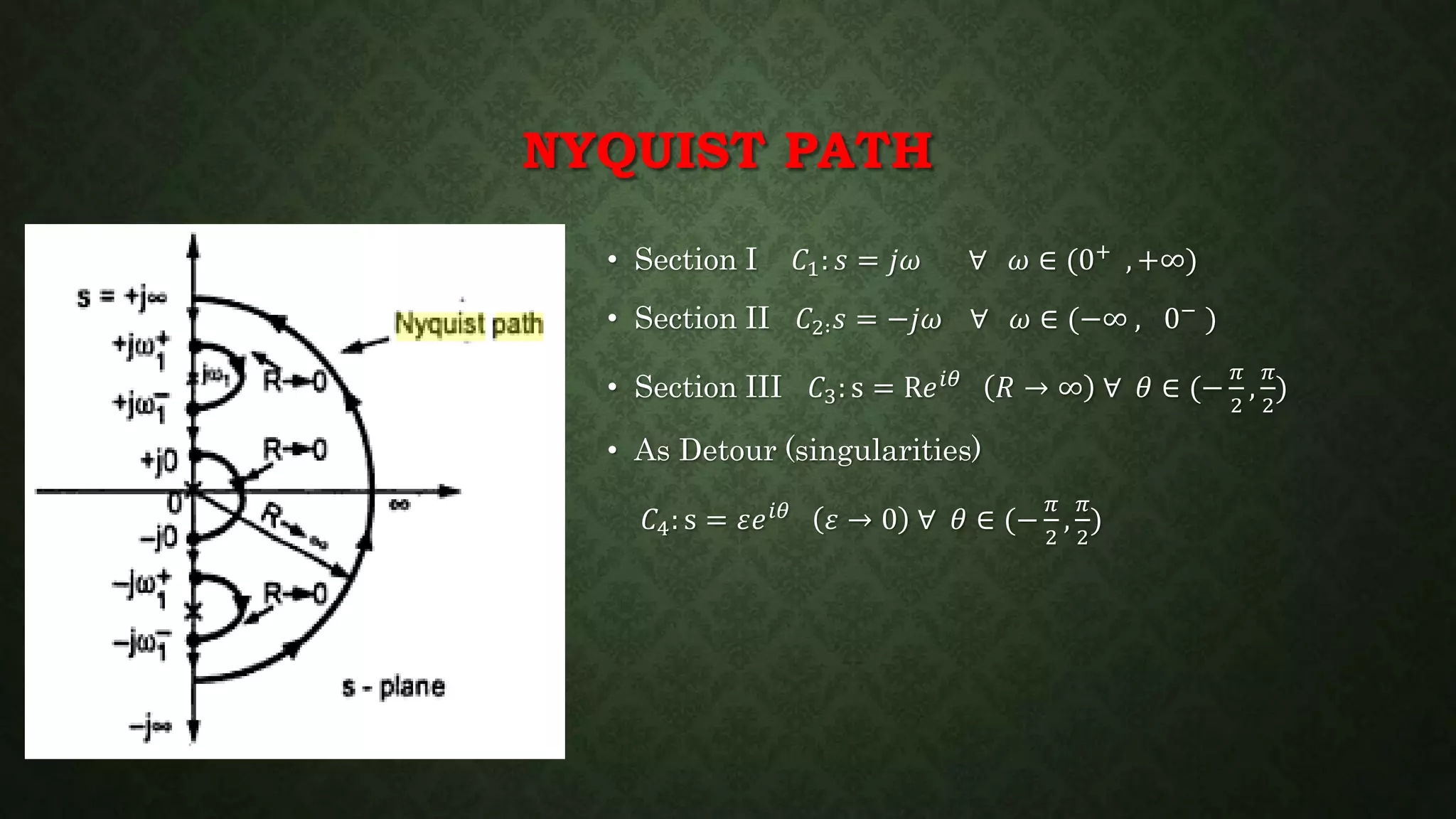
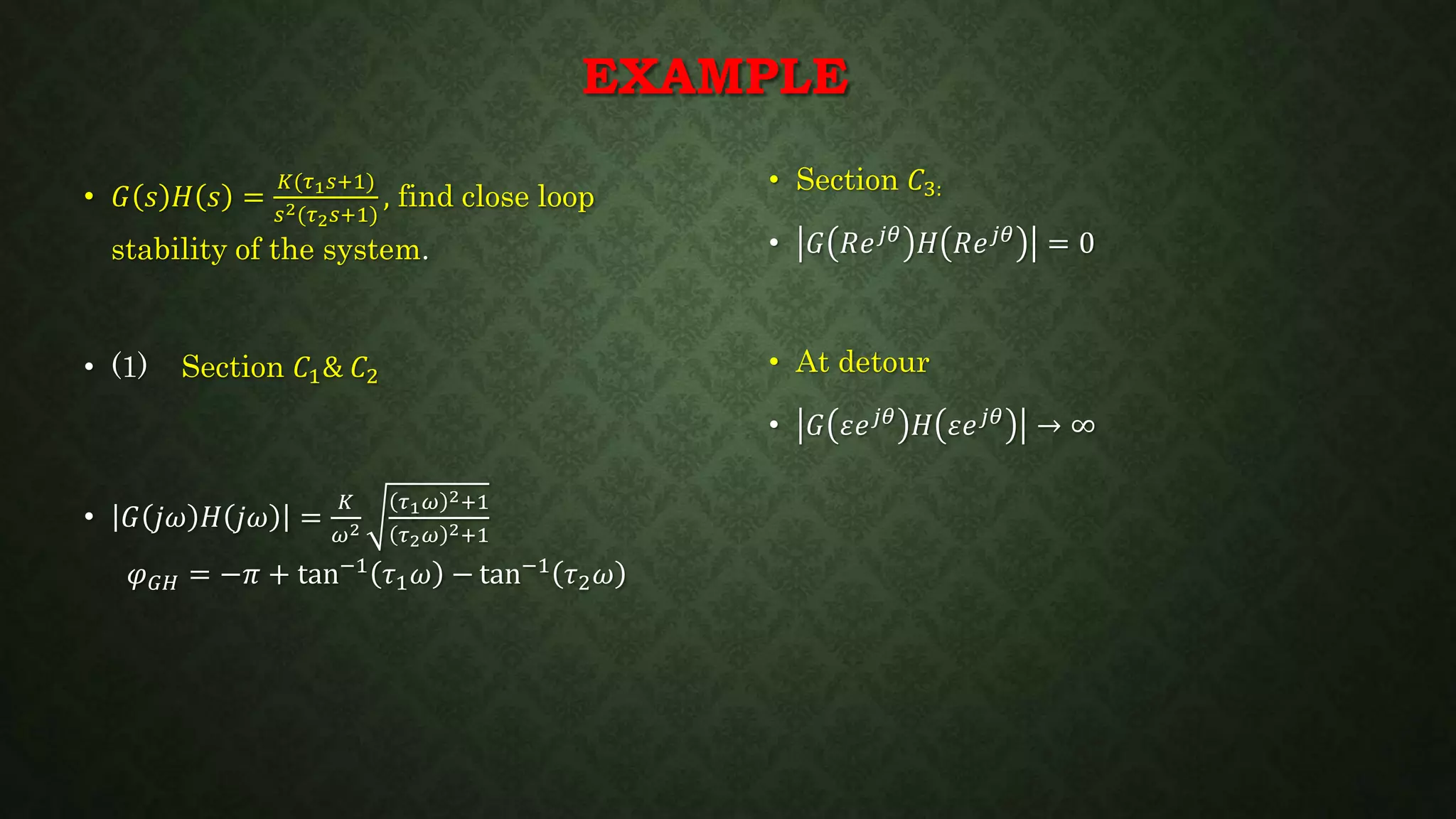
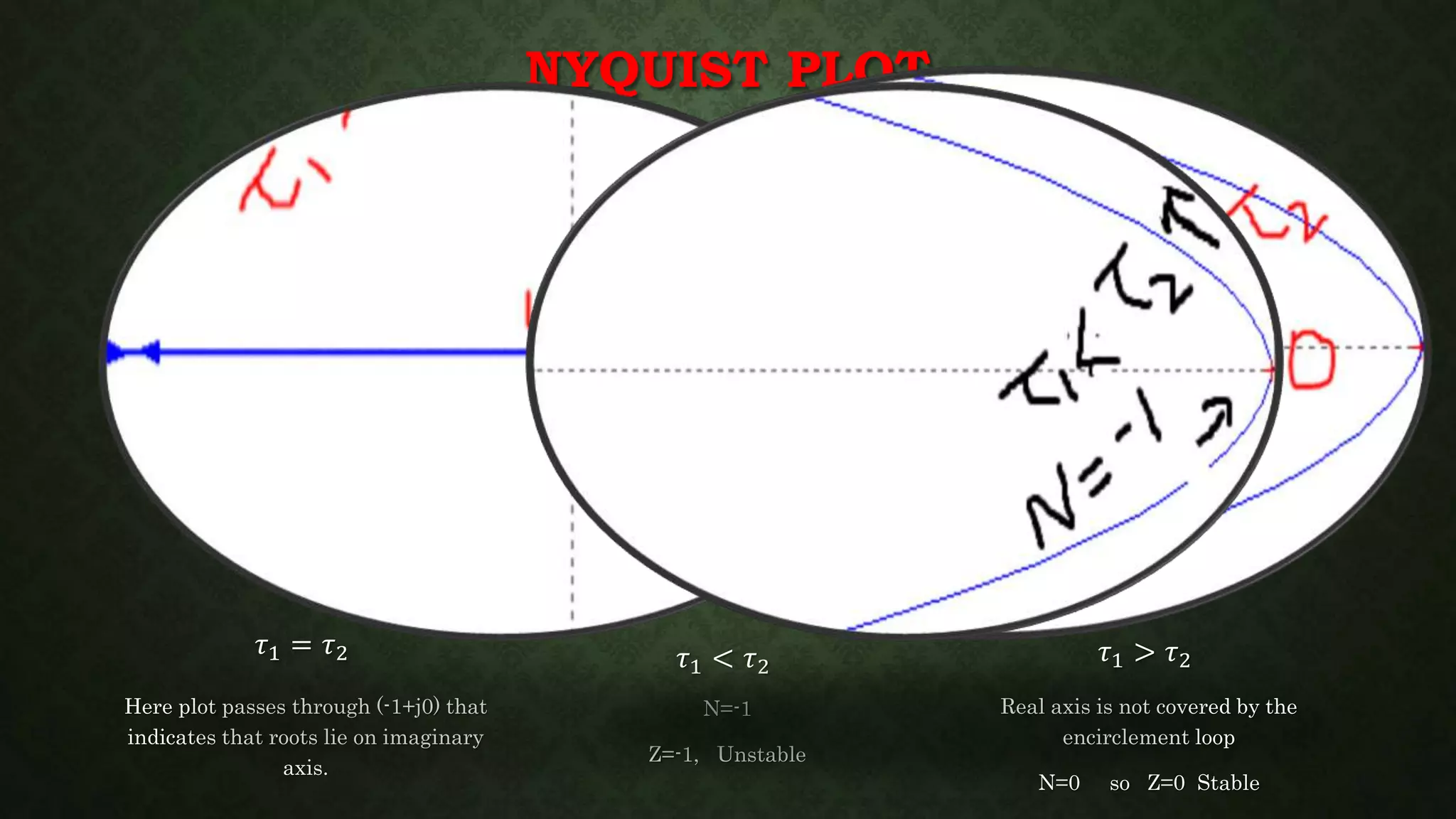

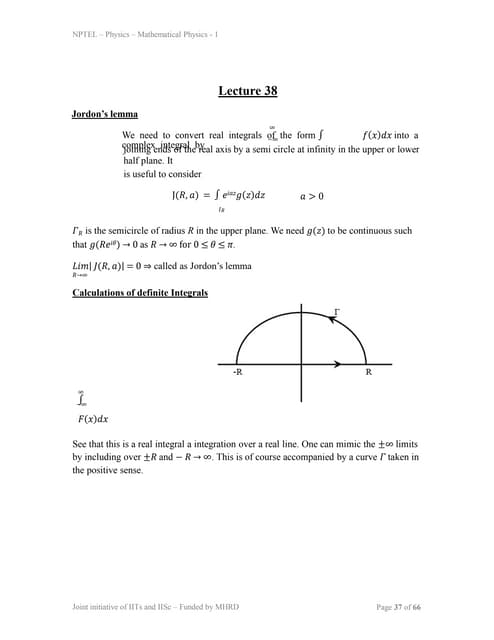
This document provides a summary of a lecture on the mathematics of Nyquist plots. Some key topics covered include: - Complex calculus concepts like Cauchy's theorem and the principle of argument. - Derivation of the Cauchy-Riemann equations. - Analytic functions and Cauchy's integral formula. - Residue theorem and its application to determining stability using encirclements in the Nyquist plot. - Construction of the Nyquist path and an example application to determine stability of a closed-loop system.