Downloaded 525 times
![Inverse z- transform example 1
Consider a sequence 𝑥[𝑛] with z transform
of 𝑋 𝑧 =
1
1−
1
4
𝑧−1 1−
1
2
𝑧−1
𝑧 >
1
2
Where the ROC is as shown
4](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-4-320.jpg)

![Inverse z- transform example 1
Note that 𝑋(𝑧) Now can be rewritten as
X 𝑧 =
−1
1−
1
4
𝑧−1
+
2
1−
1
2
𝑧−1
The inverse z transform results in the 𝑥[𝑛]
shown below 𝑥 𝑛 = − 1
4
𝑛
𝑢 𝑛 + 2 1
2
𝑛
𝑢 𝑛
6](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-6-320.jpg)





![Partial fraction example 2
Recall that from the z-transform pairs table
we have
Therefore 𝑥[𝑛] is given by
13](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-13-320.jpg)

![Inverse z transform by using
power series expansion
From the definition of the z-transform we
can write the z-transform as
𝑋 𝑧 =
𝑛=−∞
∞
𝑥[𝑛]𝑧−𝑛
= ⋯ + 𝑥 −2 𝑧2 + 𝑥 −1 𝑧1 + 𝑥 0 + 𝑥 2 𝑧−1 + 𝑥 2 𝑧−2 + ⋯
This is known as Laurent series
From this series we can find the sequence
𝑥[𝑛] as illustrated by the next example
15](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-15-320.jpg)
![Inverse z transform by using power
series example 3
Find the inverse z-transform for the
sequence defined by
𝑋 𝑧 = 𝑧2
1 − 1
2
𝑧−1
1 + 𝑧−1
1 − 𝑧−1
Solution
Note the sequence 𝑋[𝑧] can be expanded
as 𝑋 𝑧 = 𝑧2
− 1
2
𝑧 − 1 + 1
2
𝑧−1
If we compare 𝑋 𝑧 with the Laurent series
we can extract 𝑥[𝑛] as follows
16](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-16-320.jpg)

![Inverse z transform by using
power series example 4
Consider the z transform defined by
𝑋 𝑧 =
1
1−𝑎𝑧−1 𝑓𝑜𝑟 𝑧 > 𝑎
Find 𝑥[𝑛] by using long division
18](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-18-320.jpg)
![Inverse z transform by using
power series example 4
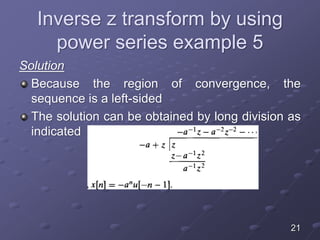
Solution
This series reduces to 𝑥 𝑛 = 𝑎 𝑛
𝑢[𝑛]
19](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-19-320.jpg)




![Example 6
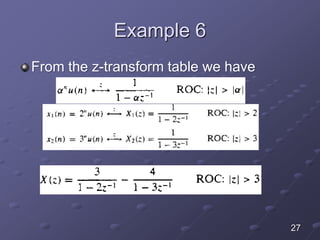
Determine the z-transform and the ROC for
the sequence 𝑥 𝑛 = 3(2) 𝑛
𝑢 𝑛 − 4(3) 𝑛
𝑢 𝑛
Solution
We can divide 𝑥[𝑛] into two different
functions 𝑥1 𝑛 = (2) 𝑛
𝑢 𝑛 𝑎𝑛𝑑 𝑥2 𝑛 =
(3) 𝑛
𝑢 𝑛
Now 𝑥[𝑛] can be rewritten as 𝑥 𝑛 = 3𝑥1 𝑛 −
4𝑥2 𝑛
26](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-26-320.jpg)
![Example 7
Determine the z-transform of 𝑥[𝑛] = 𝑢[−𝑛]
Solution
By using the time reversal property we
have
28](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-28-320.jpg)





The document discusses various methods for finding the inverse z-transform, including inspection of z-transform pairs, partial fraction expansion, and power series expansion. It provides examples of using each method to find the inverse z-transform of given z-functions. It also discusses properties of the z-transform, such as time shifting and convolution, that can help in solving inverse problems. Sample problems demonstrate applying the techniques to compute inverse z-transforms and use properties to solve for sequences.







![Digital Signal Processing[ECEG-3171]-Ch1_L02](https://cdn.slidesharecdn.com/ss_thumbnails/dspl2-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)



























































