Download to read offline


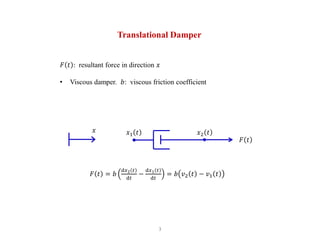























1) The document discusses system models using differential equations to describe dynamic systems. Differential equations can model both mechanical and electrical systems. 2) Translational and rotational systems involving springs, dampers, masses and inertias can be modeled using differential equations relating forces, torques, positions, velocities and accelerations. 3) The document provides examples of differential equation models for various mechanical systems like masses on springs, pendulums and mass-spring-damper systems. It also discusses modeling concepts like linearization and Laplace transforms.

























![Circuit Network Analysis - [Chapter5] Transfer function, frequency response, ...](https://cdn.slidesharecdn.com/ss_thumbnails/ch5-150613063859-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)