The Laplace transform allows solving differential equations using algebra by transforming differential operators into algebraic operations. It transforms a function of time (f(t)) into a function of a complex variable (F(s)), allowing differential equations describing systems to be solved for variables of interest. Key properties include linearity, time and frequency shifting, and relationships between derivatives, integrals, and the Laplace transform that enable solving differential equations by taking the transform, performing algebra, and applying the inverse transform.





![Evaluating F(s)=L{f(t)}- Hard Way
remember
vduuvudv
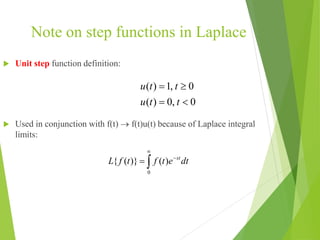
)cos(,)sin(
,
tvdttdv
dtsedueu stst
0
0 0
0
)cos()1(
)cos()cos([)sin( ]
dttese
dttestedtte
stst
ststst
)sin(,)cos(
,
tvdttdv
dtsedueu stst
00
0
0
)sin()0()sin()sin([
)cos(
] dttesedtteste
dtte
stststst
st 2
0
0
2
0 0
2
1
1
)sin(
1)sin()1(
)sin(1)sin(
s
dtte
dttes
dttesdttse
st
st
stst
let
let
Substituting, we get:
It only gets worse…](https://image.slidesharecdn.com/laplacetransform-170603060728/85/Laplace-transform-6-320.jpg)




![Properties: Linearity
)()()}()({ 22112211 sFcsFctfctfcL
Example :
1
1
)
1
)1()1(
(
2
1
)
1
1
1
1
(
2
1
}{
2
1
}{
2
1
}
2
1
2
1
{
)}{sinh(
22
ss
ss
ss
eLeL
eey
tL
tt
tt
Proof :
)()(
)()(
)]()([
)}()({
2211
0
22
0
11
22
0
11
2211
sFcsFc
dtetfcdtetfc
dtetfctfc
tfctfcL
stst
st
](https://image.slidesharecdn.com/laplacetransform-170603060728/85/Laplace-transform-12-320.jpg)





![Properties: Integrals
s
sF
tfDL
)(
)}({ 1
0
Example :
)}{sin(
1
1
)
1
)(
1
(
)}cos({
22
1
0
tL
ss
s
s
tDL
Proof :
let
stst
st
e
s
vdtedv
dttfdutgu
dtetgtL
tfDtg
1
,
)(),(
)()}{sin(
)()(
0
1
0
t
stst
dttftg
s
sF
dtetf
s
etg
s
0
0
)()(
)(
)(
1
])(
1
[
0
)()( dtetft st
If t=0, g(t)=0
for so
slower than
0
)()( tgdttf 0st
e](https://image.slidesharecdn.com/laplacetransform-170603060728/85/Laplace-transform-18-320.jpg)
(,)(
,
)()}({
0
0
0
ssFf
dtetfstfe
tfvdttf
dt
d
dv
sedueu
dtetf
dt
d
tDfL
stst
stst
st
let](https://image.slidesharecdn.com/laplacetransform-170603060728/85/Laplace-transform-19-320.jpg)


![Properties: Nth order derivatives
)0()()}({ fssFtDfL
)}({ 2
tfDL
)0()()}({)}({)(
)0(')0(
)()(
)0()()}({
)()()()( 2
fssFtDfLtgLsG
fg
tDftg
gssGtDgL
tfDtDgandtDftg
)0(')0()()0(')]0()([)0()()}({ 2
fsfsFsffssFsgssGtDgL
.),(),( 43
etctfDtfD
Start with
Now apply again
let
then
remember
Can repeat for
)0()0()0(')0()()}({ )'1()'2()2()1(
nnnnnn
fsffsfssFstfDL ](https://image.slidesharecdn.com/laplacetransform-170603060728/85/Laplace-transform-22-320.jpg)























































































