The document discusses the inverse Laplace transform and related topics. It provides three main cases for performing partial fraction expansions when taking the inverse Laplace transform: 1) non-repeated simple roots, 2) complex poles, and 3) repeated poles. It also discusses the convolution integral and how it relates the time domain convolution of two functions to the multiplication of their Laplace transforms. An example uses the convolution integral to find the output of a system given its impulse response and input.
![Inverse Laplace Transforms
Case 1: Illustration:
Given:
)10()4()1()10)(4)(1(
)2(4
)( 321
+
+
+
+
+
=
+++
+
=
s
A
s
A
s
A
sss
s
sF
274
)10)(4)(1(
)2(4)1(
| 11
=
+++
++
= −=s
sss
ss
A 94
)10)(4)(1(
)2(4)4(
| 42
=
+++
++
= −=ssss
ss
A
2716
)10)(4)(1(
)2(4)10(
| 103
−=
+++
++
= −=ssss
ss
A
[ ] )()2716()94()274()( 104
tueeetf ttt −−−
−++=
Find A1, A2, A3 from Heavyside](https://image.slidesharecdn.com/inverselaplacetransforms-171225074732/85/Inverse-laplace-transforms-4-320.jpg)
![Inverse Laplace Transforms
Case 3: Repeated roots.
When we have repeated roots we find the coefficients of the
terms as follows:
[ ]|
111
)()( 1 psr
sFps
ds
d
k r
−=−
+=
[ ]|
121
)()(
!2 12
2
psr
sFps
ds
d
k r
−=−
+=
[ ]|
11
)()(
)!( 1 psj
sFps
dsjr
d
k r
jr
jr
−=+
−
= −
−](https://image.slidesharecdn.com/inverselaplacetransforms-171225074732/85/Inverse-laplace-transforms-5-320.jpg)
![Inverse Laplace Transforms
Case 3: Repeated roots. Example
=
=
=
+
+
+
+=
+
+
=
2
1
1
2
211
2
)3()3()3(
)1(
)(
K
K
A
s
K
s
K
s
A
ss
s
sF
[ ] [ ] [ ][ ] )(____________________)( 33
tuteetf tt −−
++= ? ? ?](https://image.slidesharecdn.com/inverselaplacetransforms-171225074732/85/Inverse-laplace-transforms-6-320.jpg)
![Inverse Laplace Transforms
[ ])cos(||2
|||
1
111
θβ
βαβα
α
θθ
+=
++
+
−+
−
−
−
teK
js
eK
js
eK
L t
jj
Case 2: Complex Roots:
Therefore:
You should put this in your memory:](https://image.slidesharecdn.com/inverselaplacetransforms-171225074732/85/Inverse-laplace-transforms-9-320.jpg)
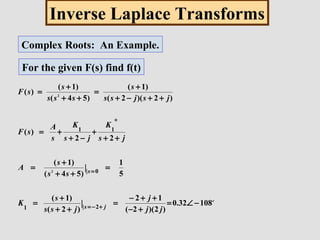
![Inverse Laplace Transforms
Complex Roots: An Example. (continued)
We then have;
jsjss
sF
oo
++
+∠
+
−+
−∠
+=
2
10832.0
2
10832.02.0
)(
Recalling the form of the inverse for complex roots;
[ ] )(108cos(64.02.0)( 2
tutetf ot
−+= −](https://image.slidesharecdn.com/inverselaplacetransforms-171225074732/85/Inverse-laplace-transforms-11-320.jpg)
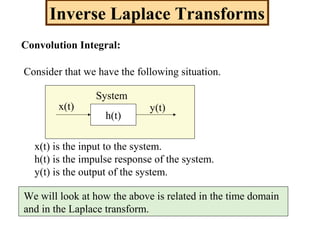
![Inverse Laplace Transforms
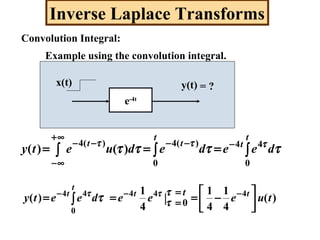
Convolution Integral:
In the time domain we can write the following:
∫∫
=
=
=
=
−=−=⊕=
tt
dxthdhtxthtxty
τ
τ
τ
τ
ττττττ
00
)()()()()()()(
In this case x(t) and h(t) are said to be convolved and the
integral on the right is called the convolution integral.
It can be shown that,
[ ] ( )sHsXsYthtxL )()()()( ==⊕
This is very important
* note](https://image.slidesharecdn.com/inverselaplacetransforms-171225074732/85/Inverse-laplace-transforms-13-320.jpg)
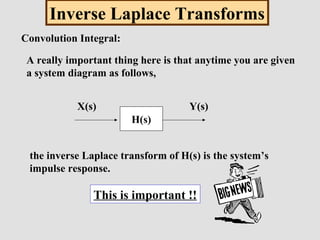
![Inverse Laplace Transforms
Convolution Integral:
From the previous diagram we note the following:
[ ] [ ] [ ])()(;)()(;)()( thLsHtyLsYtxLsX ===
h(t) is called the system impulse response for the following
reason.
)()()( sHsXsY =
If the input x(t) is a unit impulse, δ(t), the L(x(t)) = X(s) = 1.
Since x(t) is an impulse, we say that y(t) is the impulse
response. From Eq A, if X(s) = 1, then Y(s) = H(s). Since,
Eq A
[ ] [ ]
.)(,
)()()()( 11
responseimpulsesystemthSo
thsHLresponseimpulsetysYL
=
==== −−](https://image.slidesharecdn.com/inverselaplacetransforms-171225074732/85/Inverse-laplace-transforms-15-320.jpg)
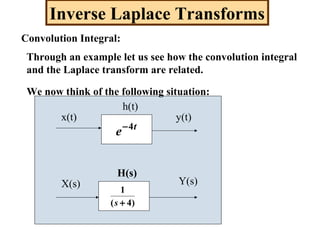
![Inverse Laplace Transforms
Convolution Integral:
Same example but using Laplace.
x(t) = u(t)
s
sX
1
)( =
h(t) = e-4t
u(t)
4
1
)(
+
=
s
sH
[ ] )(1
4
1
)(
4
4141
4)4(
1
)(
4
tuety
sss
B
s
A
ss
sY
t−
−=
+
−=
+
+=
+
=](https://image.slidesharecdn.com/inverselaplacetransforms-171225074732/85/Inverse-laplace-transforms-18-320.jpg)
![Inverse Laplace Transforms
Convolution Integral:
Practice problems:
?)(,
)2(
3
)(
2
)()( thiswhat
s
sYand
s
sXIfa
+
==
).(),()()()()( 6
thfindtutetyandtutxIfb t−
==
).(,
)4(
2
)()()()( 2
tyfind
s
sHandttutxIfc
+
==
Answers given on note page
[ ])(2)(5.1)( 2
tuetth t−
−= δ](https://image.slidesharecdn.com/inverselaplacetransforms-171225074732/85/Inverse-laplace-transforms-19-320.jpg)