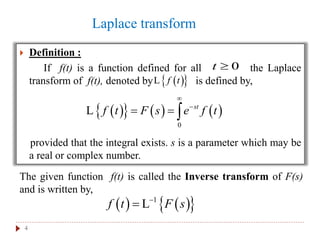
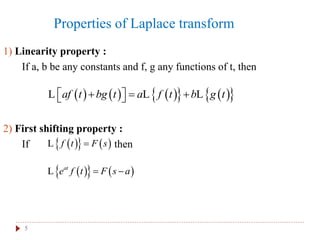
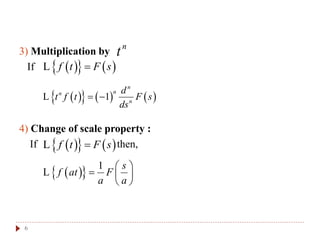
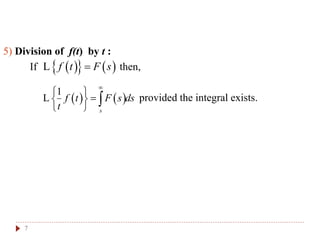
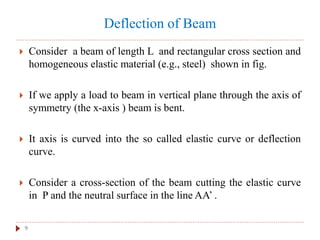
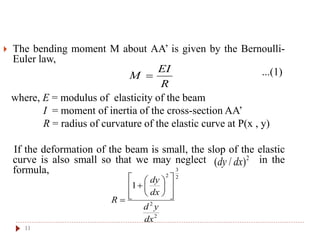
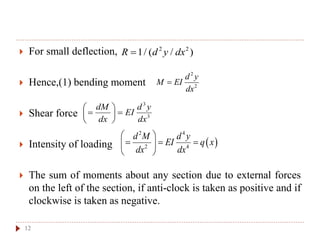
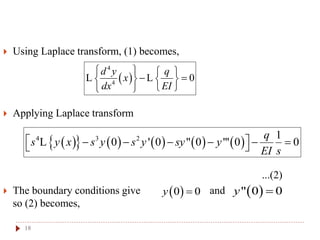
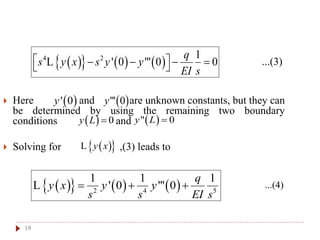
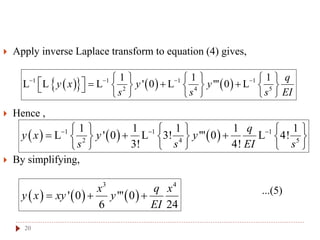
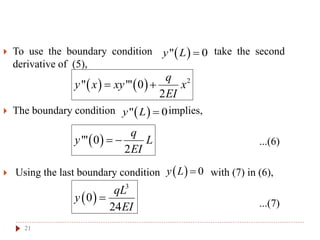
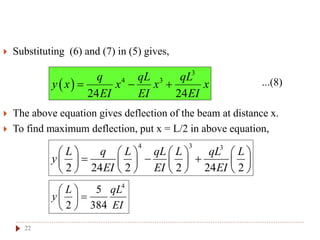
This document provides an introduction and overview of the Laplace transform method for solving differential equations. It defines the Laplace transform and lists some of its key properties. It then provides examples of using the Laplace transform method to solve problems involving the deflection of beams under different loading conditions. Specifically, it shows how to use the Laplace transform to find the deflection of a beam with uniform distributed load that is simply supported at both ends. The resulting equation provides the deflection as a function of position along the beam.