Downloaded 660 times

![
E) Time Shift
The Laplace transform of f(t) delayed by time T
is equal to the Laplace transform of f(t)
multiplied by e-sT ; that is
L[f ( t – T ) u( t – T )] = e-sT F(s), where u (t – T)
denotes the unit step function, which is shifted
to the right in time by T.
MAR JKE](https://image.slidesharecdn.com/chapter2newlaplace-131113004750-phpapp01/85/Chapter-2-Laplace-Transform-13-320.jpg)
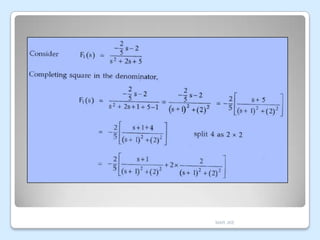
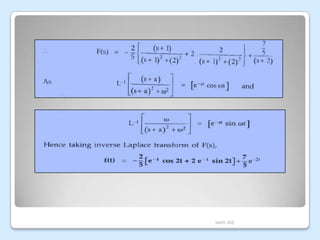

This document discusses Laplace transforms and their applications in control systems. It begins by defining the Laplace transform and explaining how it can be used to solve differential equations by transforming them from the time domain to the complex frequency domain. It then provides several properties and formulas for Laplace transforms, including derivatives, integrals, time shifts, and partial fraction decomposition. Examples are given to demonstrate finding the Laplace transform of common functions and taking the inverse Laplace transform. The document concludes by explaining how Laplace transforms can be used to analyze control systems modeled by integrodifferential equations.



































































