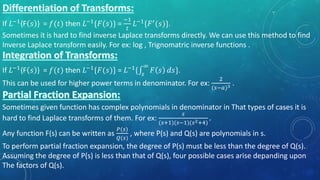
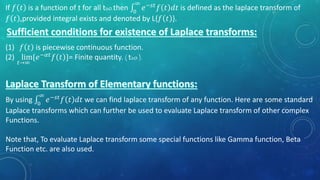
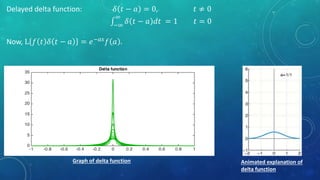
The Laplace transform is an integral transform that converts a function of time (often a function that represents a signal) into a function of complex frequency. It has various applications in engineering for solving differential equations and analyzing linear systems. The key aspect is that it converts differential operators into algebraic operations, allowing differential equations to be solved as algebraic equations. This makes the equations much easier to manipulate and solve compared to the original differential form.
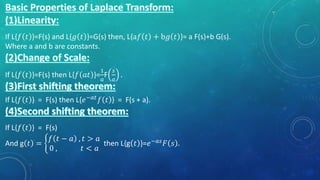


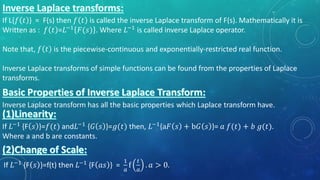
![If 𝐿−1
{F 𝑠 } = 𝑓(𝑡) then 𝐿−1
{F(s + a)} = 𝑒−𝑎𝑡
𝑓 𝑡 .
If 𝐿−1
{F 𝑠 } = 𝑓(𝑡)
And g 𝑡 =
𝑓 𝑡 − 𝑎 , 𝑡 > 𝑎
0 , 𝑡 < 𝑎
then 𝐿−1 {𝑒−𝑎𝑠 𝐹 𝑠 } = 𝑔 𝑡 .
If 𝐿−1 {F 𝑠 } = 𝑓 𝑡 then 𝐿−1 {sF 𝑠 } = 𝑓′(𝑡) =
𝑑
𝑑𝑡
[𝐿−1 {F 𝑠 }].
In general, 𝐿−1 {𝑠 𝑛F 𝑠 } = 𝑓 𝑛(𝑡).
If 𝐿−1
{F 𝑠 } = 𝑓 𝑡 then 𝐿−1
{
𝐹(𝑠)
𝑠
} = 0
𝑡
𝑓 𝑡 𝑑𝑡.
In general, 𝐿−1 {
𝐹(𝑠)
𝑠 𝑛 } = 0
𝑡
0
𝑡
0
𝑡
… 𝑛 𝑡𝑖𝑚𝑒𝑠 𝑓 𝑡 𝑑𝑡 𝑑𝑡 𝑑𝑡 … 𝑛 𝑡𝑖𝑚𝑒𝑠.](https://image.slidesharecdn.com/laplace-181004130932/85/Laplace-Transform-and-its-applications-11-320.jpg)