Laplace transforms can be used to:
1) Find solutions to differential equations by converting them to algebraic equations using the Laplace transform.
2) Characterize linear time-invariant systems by relating the Laplace transform of the input to the output.
3) Avoid convolving the input and the differential equation solution directly.


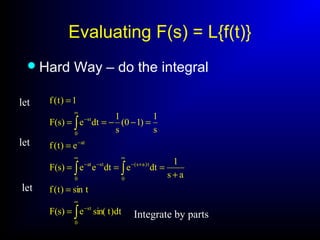
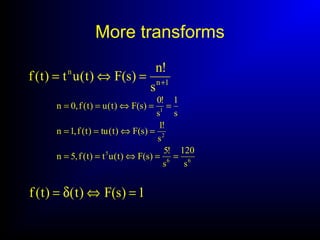
![Evaluating F(s)=L{f(t)}- Hard Way
remember ∫ ∫−= vduuvudv
)tcos(v,dt)tsin(dv
dtsedu,eu stst
−==
−== −−
∫
∫ ∫
∞
−−
∞ ∞
−∞−−
−−
=−−=∴
0
stst
0 0
st
0
stst
dt)tcos(es)1(e
dt)tcos(es)tcos(e[dt)tsin(e ]
)tsin(v,dt)tcos(dv
dtsedu,eu stst
==
−== −−
∫∫
∫
∞
−−
∞
−∞−
∞
−
+−=+−
=∴
0
stst
0
st
0
st
0
st
dt)tsin(es)0(edt)tsin(es)tsin(e[
dt)tcos(e
]
2
0
st
0
st2
0 0
st2st
s1
1
dt)tsin(e
1dt)tsin(e)s1(
dt)tsin(es1dt)tsin(se
+
=
=+
=−=
∫
∫
∫ ∫
∞
−
∞
−
∞ ∞
−−
let
let
Substituting, we get:
It only gets worse…](https://image.slidesharecdn.com/laplace-180514084528/85/Laplace-6-320.jpg)
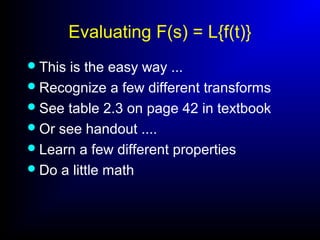
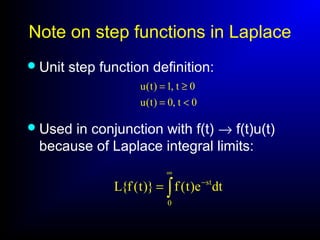

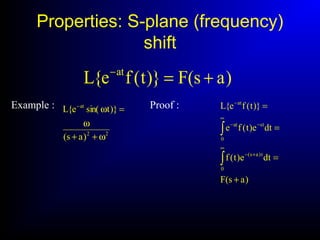
![Properties: Linearity
)s(Fc)s(Fc)}t(fc)t(fc{L 22112211 +=+
Example :
1s
1
)
1s
)1s()1s(
(
2
1
)
1s
1
1s
1
(
2
1
}e{L
2
1
}e{L
2
1
}e
2
1
e
2
1
{y
)}t{sinh(L
22
tt
tt
−
=
−
−−+
=
+
−
−
=−
=−
=
−
−
Proof :
)s(Fc)s(Fc
dte)t(fcdte)t(fc
dte)]t(fc)t(fc[
)}t(fc)t(fc{L
2211
0
st
22
0
st
11
st
22
0
11
2211
+
=+
=+
=+
∫∫
∫
∞
−
∞
−
−
∞](https://image.slidesharecdn.com/laplace-180514084528/85/Laplace-12-320.jpg)
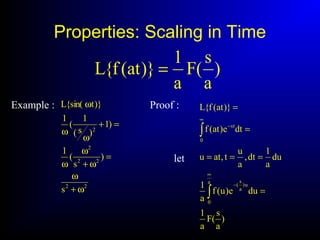
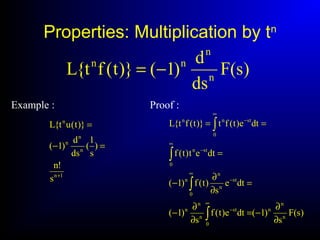
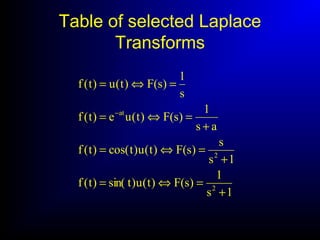
![Properties: Integrals
s
)s(F
)}t(fD{L 1
0 =−
Example :
)}t{sin(L
1s
1
)
1s
s
)(
s
1
(
)}tcos(D{L
22
1
0
+
=
+
=−
Proof :
let
stst
0
st
1
0
e
s
1
v,dtedv
dt)t(fdu),t(gu
dte)t(g)}t{sin(L
)t(fD)t(g
−−
∞
−
−
−==
==
=
=
∫
∫
∫
=
=+−= −∞−
t
0
st
0
st
dt)t(f)t(g
s
)s(F
dte)t(f
s
1
]e)t(g
s
1
[
∫
∞
−
∞<⇒∞=
0
)()( dtetft st
If t=0, g(t)=0
for so
slower than∫
∞
∞→=
0
)()( tgdttf 0→−st
e](https://image.slidesharecdn.com/laplace-180514084528/85/Laplace-18-320.jpg)
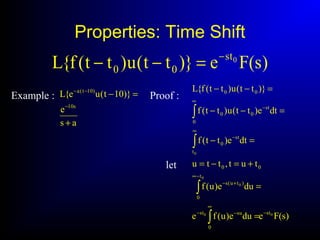
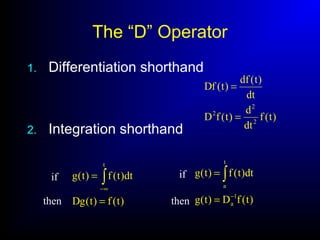
![Properties: Derivatives
(this is the big one)
)0(f)s(sF)}t(Df{L +
−=
Example :
)}tsin({L
1s
1
1s
)1s(s
1
1s
s
)0(f
1s
s
)}tcos(D{L
2
2
22
2
2
2
2
−=
+
−
+
+−
=−
+
=−
+
=
+
Proof :
)s(sF)0(f
dte)t(fs)]t(fe[
)t(fv,dt)t(f
dt
d
dv
sedu,eu
dte)t(f
dt
d
)}t(Df{L
0
st
0
st
stst
0
st
+−
=+
==
−==
=
+
∞
−∞−
−−
∞
−
∫
∫
let](https://image.slidesharecdn.com/laplace-180514084528/85/Laplace-19-320.jpg)
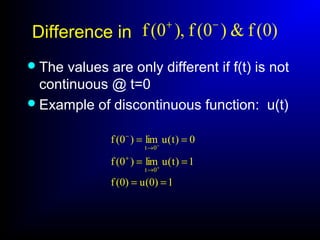
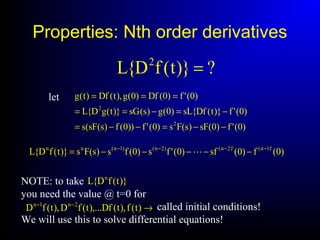
![Properties: Nth order derivatives
)0(f)s(sF)}t(Df{L −=
)}t(fD{L 2
)0(f)s(sF)}t(Df{L)}t(g{L)s(G
)0('f)0(g
)t(Df)t(g
)0(g)s(sG)}t(Dg{L
)t(fD)t(Dgand)t(Df)t(g 2
−===
=∴
=
−=
==
)0('f)0(sf)s(Fs)0('f)]0(f)s(sF[s)0(g)s(sG)}t(Dg{L 2
−−=−−=−=∴
.etc),t(fD),t(fD 43
Start with
Now apply again
let
then
remember
Can repeat for
)0(f)0(sf)0('fs)0(fs)s(Fs)}t(fD{L )'1n()'2n()2n()1n(nn −−−−
−−−−−= ](https://image.slidesharecdn.com/laplace-180514084528/85/Laplace-22-320.jpg)