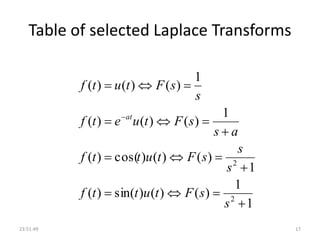
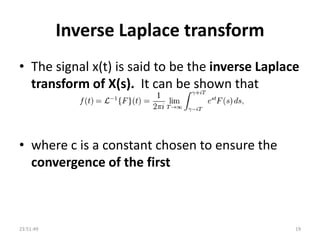
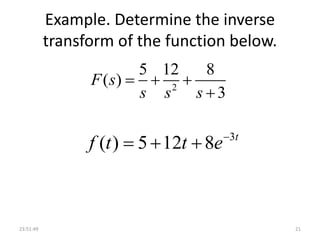
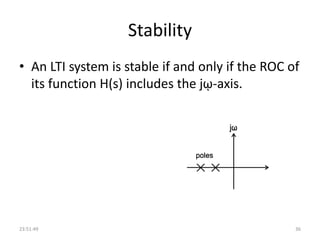
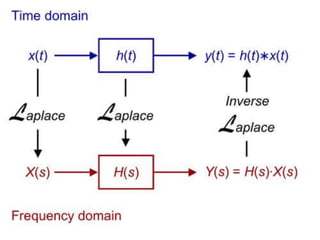
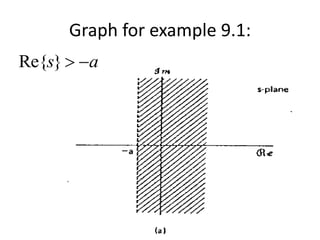
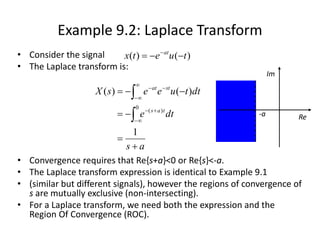
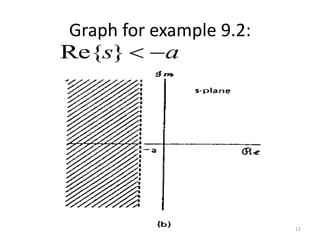
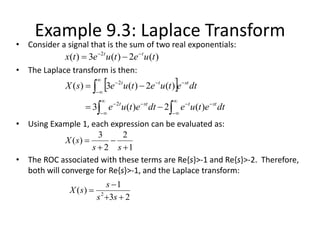
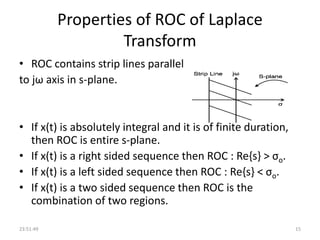
The document discusses the Laplace transform, which converts a function of time into a function of a complex frequency variable. It covers definitions, types (unilateral and bilateral), mathematical expressions, regions of convergence (ROC), properties, and examples of applications including inverse transformations and system analysis. Key characteristics about stability and causality of linear time-invariant (LTI) systems are also outlined.
![Common transform pairs
23:51:49 16
( )f t ( ) [ ( )]F s L f t
1 or ( )u t 1
s
T-1
t
e 1
s
T-2
sin tw
2 2
s
w
w
T-3
cos tw
2 2
s
s w
T-4
sint
e t
w
2 2
( )s
w
w
T-5*
cost
e t
w
2 2
( )
s
s
w
T-6*
t
2
1
s
T-7
n
t 1
!
n
n
s
T-8
t n
e t
1
!
( )n
n
s
T-9
( )t 1 T-10
*Use when roots are complex.](https://image.slidesharecdn.com/laplacetransform-180227070254/85/Laplace-transform-16-320.jpg)