Downloaded 460 times
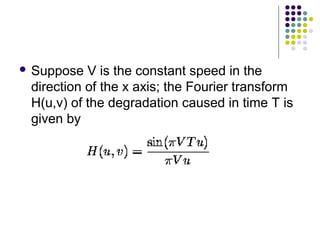
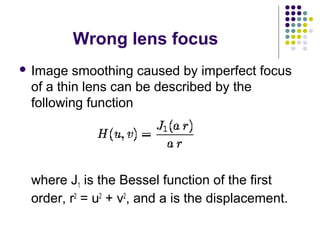
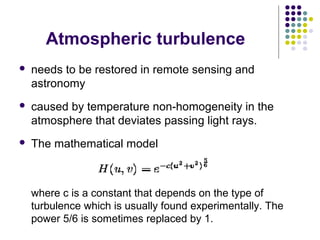

This document discusses image restoration techniques. It describes how image degradation occurs through various processes and the goal of image restoration is to reconstruct the original image from its degraded version. There are two main categories of restoration techniques - deterministic and stochastic. Deterministic techniques use an inverse transformation when the degradation function is known, while stochastic techniques estimate the best restoration according to some criterion. Common degradation functions include relative motion, lens focus issues, and atmospheric turbulence. Inverse filtration and Wiener filtration are two restoration methods described, with Wiener filtration taking noise into account to minimize mean square error.