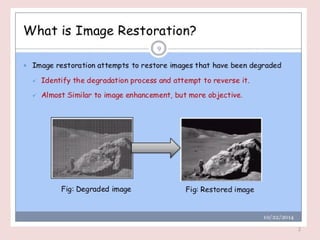
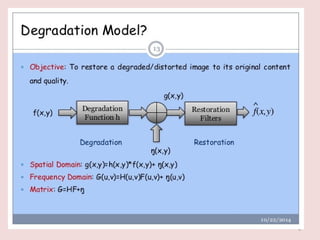
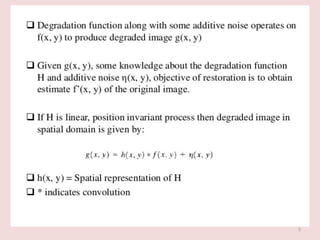
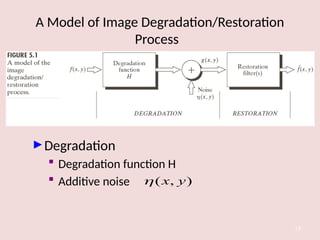
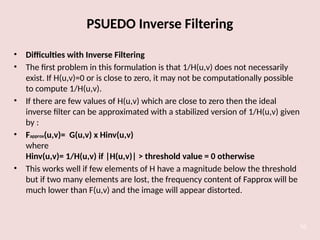
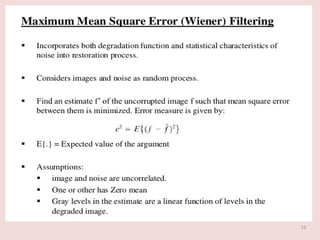
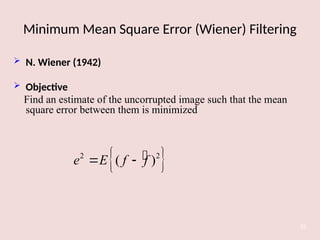
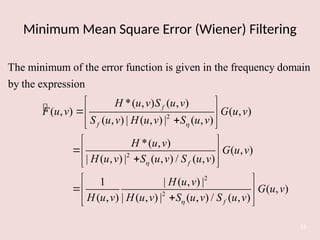
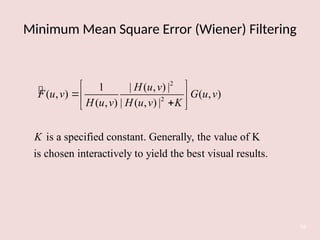
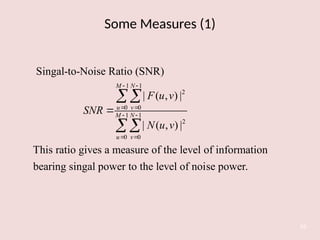
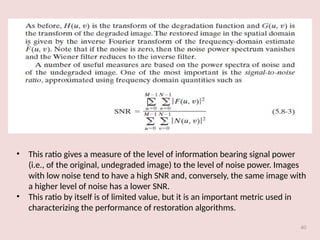
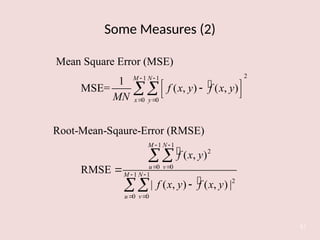
The document discusses image restoration techniques aimed at recovering degraded images using knowledge of degradation phenomena, focusing on objective processes unlike the subjective nature of image enhancement. It outlines methods such as spatial filtering, inverse filtering, and Wiener filtering, and addresses issues related to noise and degradation models. Key metrics for evaluating restoration performance are also mentioned, including the signal-to-noise ratio and mean square error.