Download as PDF, PPTX
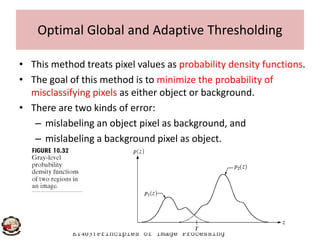
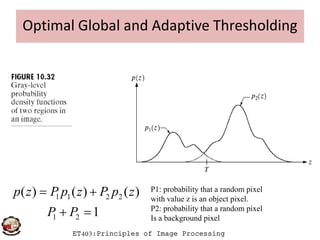

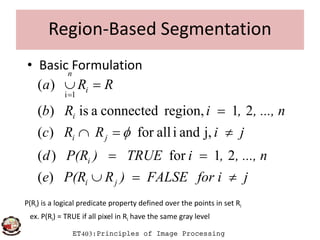
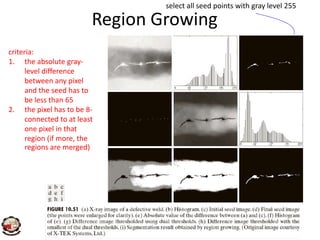
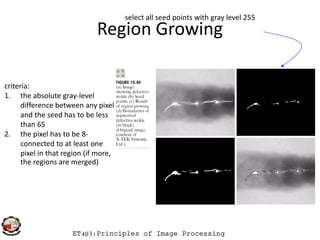
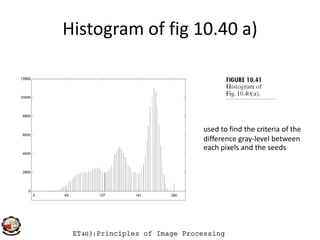
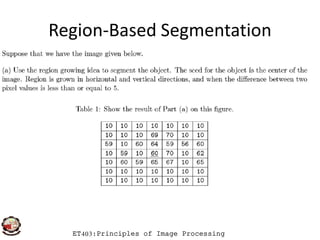
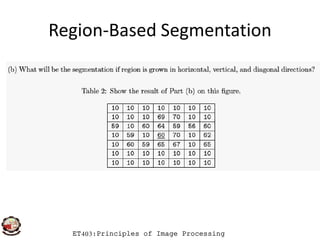
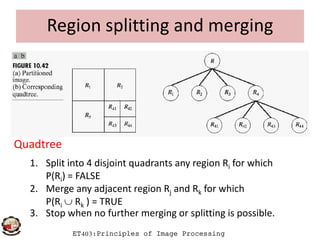
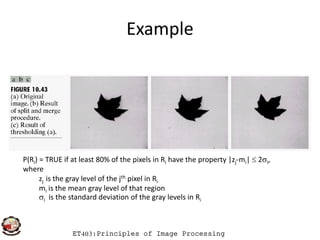
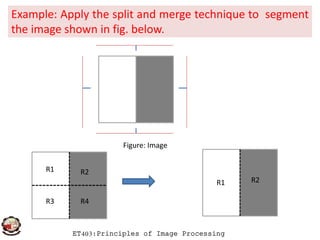
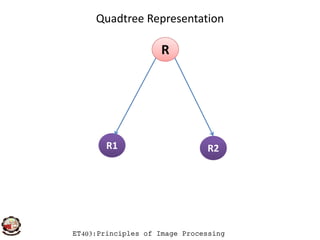
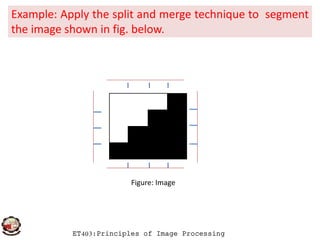
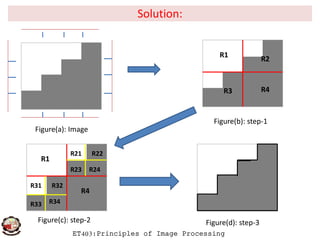
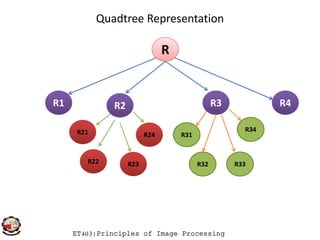
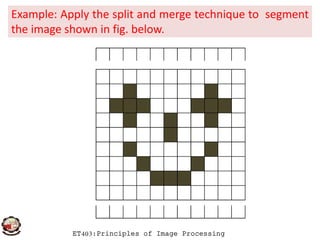
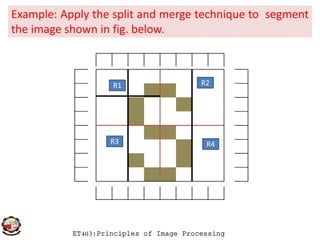
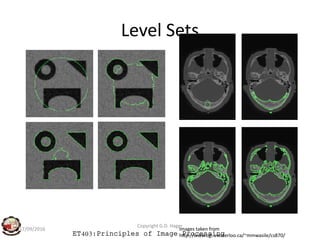
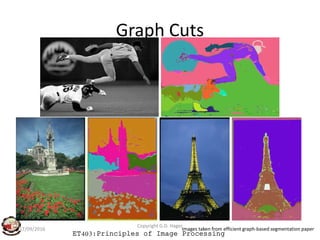
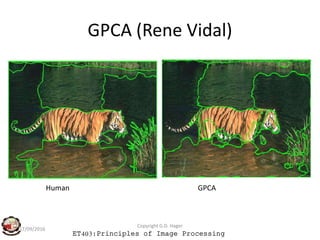
Unit 3 discusses image segmentation techniques. Similarity based techniques group similar image components, like pixels or frames, for compact representation. Common applications include medical imaging, satellite images, and surveillance. Methods include thresholding and k-means clustering. Segmentation of grayscale images is based on discontinuities in pixel values, detecting edges, or similarities using thresholding, region growing, and splitting/merging. Region growing starts with seed pixels and groups neighboring pixels with similar properties. Region splitting starts with the full image and divides non-homogeneous regions, while region merging combines small similar regions.