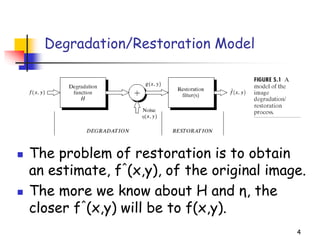
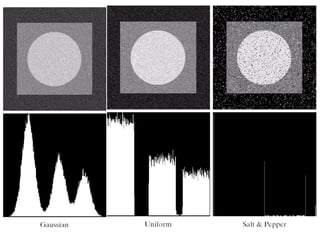
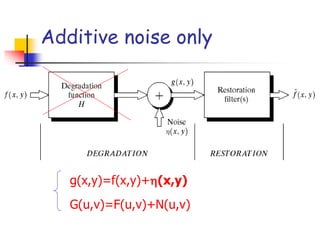
Image restoration is a process of reconstructing an image that has been degraded to recover the original image using knowledge of the degradation process. The goal is to estimate the original image by modeling the degradation and applying the inverse process. Common degradations include noise, which can be modeled statistically. Restoration techniques include spatial filters like mean, median filters to reduce additive noise, and frequency domain filters to reduce periodic noise. The degradation function must be estimated from the image, experimentally, or by modeling before applying inverse or Wiener filtering for restoration.