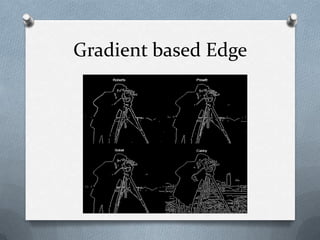
The document discusses edge detection methods including gradient based approaches like Sobel and zero crossing based techniques like Laplacian of Gaussian. It proposes a new algorithm that applies fuzzy logic to the results of gradient and zero crossing edge detection on an image to more accurately identify edges. The algorithm calculates gradient and zero crossings, applies fuzzy rules to classify pixels, and thresholds to determine final edge pixels.

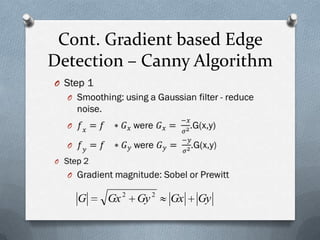
![Cont. Gradient based Edge
Detection - Roberts
O 2X2 Convolution Mask
O Convolution Mask
O Gx Gy
1 0 0 -1
0 -1 1 0
O Differences are computed at the
interpolated points [i+1/2, j+1/2] and not
[i, j].
O Responds to edge with 450.](https://image.slidesharecdn.com/edgedetection-120618113143-phpapp02/85/Edge-detection-12-320.jpg)















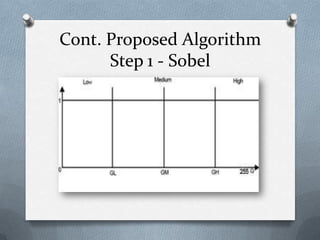
![Cont. Proposed Algorithm
Step 1 - Sobel
O The resulted Gradient are mapped from
[0-255]
O Divide into four regions:
O Low class GL from [0-GL].
O Medium class GM
O from [GL-GM] .
O From [GM-GH] .
O High class GH from [GH-255].](https://image.slidesharecdn.com/edgedetection-120618113143-phpapp02/85/Edge-detection-34-320.jpg)

![Cont. Proposed Algorithm
Step 3 – Fuzzy sets
O Pixel (PG), zero crossing value (PZ), and
probability of a pixel corresponds to an edge
{EL, EM, EH}.
O If PG is in GL and PZ equals to 1, then P belongs to EL.
O If PG is in GL and PZ equals to a zero, then P belongs to EL.
O If PG is in [GL-GM] and PZ equals to 1, then P belongs to EM.
O If PG is in [GL-GM] and PZ equals to zero, then P belongs to
EL.
O If PG is in [GM-GH] and PZ equals to 1, then P belongs to EH.
O If PG is in [GM-GH] and PZ equals to zero, then P belongs to
EM.
O If PG is in GH and PZ equals to 1, then P belongs to EH.
O If PG is in GH and PZ equals to zero, then P belongs to EM.](https://image.slidesharecdn.com/edgedetection-120618113143-phpapp02/85/Edge-detection-38-320.jpg)