Downloaded 2,175 times

















![Gaussian Noise
Gaussian noise is caused by random fluctuations in the
signal , its modeled by random values add to an image
This noise has a probability density function [pdf] of the
normal distribution. It is also known as Gaussian
distribution.](https://image.slidesharecdn.com/noisefiltering-131223205009-phpapp02/85/Noise-filtering-21-320.jpg)

































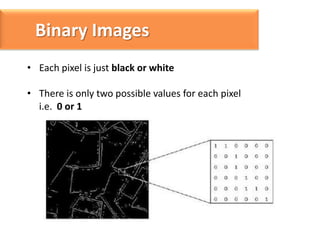
This document discusses noise addition and filtering in images. It begins by introducing different types of digital images like binary, grayscale, and color images. It then discusses various sources of image noise like sensor heat, ISO settings, and memory failures. The main types of noise covered are salt and pepper noise, Gaussian noise, speckle noise, and uniform noise. Linear and non-linear filtering techniques are described for removing each noise type, including median filtering, Wiener filtering, and mean/Gaussian filtering. Performance of filters is evaluated using measures like mean squared error and peak signal-to-noise ratio. Matlab is mentioned for implementing noise addition and filtering.