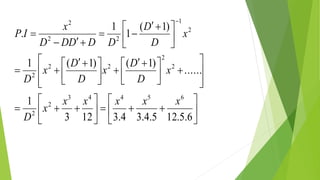
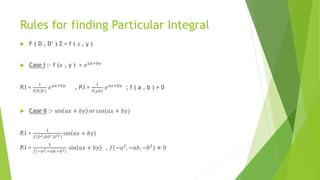
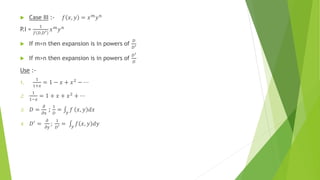
The document discusses higher-order non-homogeneous partial differential equations (PDEs), providing definitions, general forms, and methods for finding solutions. It highlights the role of complementary functions and particular integrals in obtaining complete solutions, with examples illustrating these concepts. Additionally, the applications of PDEs in various scientific fields, including heat and wave equations, are mentioned, showcasing their significance in modeling complex phenomena.





![P.I = 𝐷2
− 𝐷𝐷′
𝑍 = −
1
2 2𝑠𝑖𝑛𝑥𝑠𝑖𝑛2𝑦
P.I= −
1
2 cos 𝑥+2𝑦 −cos 𝑥−2𝑦
P.I =
1
𝐷−𝐷𝐷′ −
1
2
cos 𝑥 + 2𝑦 − cos 𝑥1 − 2𝑦
P.I= [−
1
2
1
D2−DD’
cos 𝑥 + 2𝑦 −
1
𝐷2−𝐷𝐷′ cos 𝑥 − 2𝑦 ]
P.I= −
1
2
1
1 2− 1 2
cos 𝑥 + 2𝑦 −
1
1 2− 1 −2
cos 𝑥 − 2𝑦
P.I= −
1
2
cos 𝑥 + 2𝑦 −
1
3
cos 𝑥 − 2𝑦
P.I=
1
2
cos 𝑥 + 2𝑦 −
1
6
cos 𝑥 − 2𝑦
Solution is Z = C.F + P.I
Z = 𝑓1 𝑦 + 𝑓2 𝑦 + 𝑥 +
1
2
cos 𝑥 + 2𝑦 −
1
6
cos 𝑥 − 2𝑦](https://image.slidesharecdn.com/aem-170330212922/85/Higherorder-non-homogeneous-partial-differrential-equations-Maths-3-Power-Point-representation-13-320.jpg)