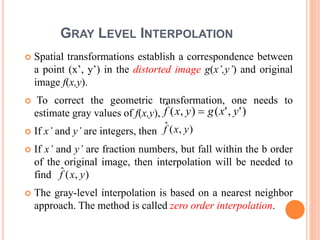
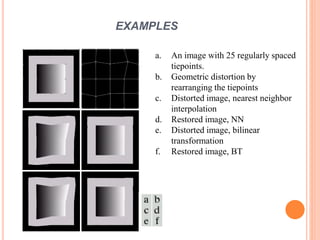
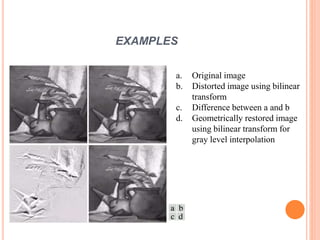
This document summarizes techniques for least mean square filtering and geometric transformations. It discusses minimum mean square error (Wiener) filtering, constrained least squares filtering, and geometric mean filtering for noise removal. It also covers spatial transformations, nearest neighbor gray level interpolation, and bilinear interpolation for geometric correction of distorted images. Examples are provided to demonstrate geometric distortion, nearest neighbor interpolation, and bilinear transformation.


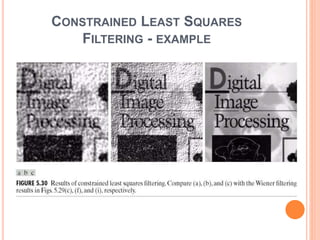
![CONSTRAINED LEAST SQUARES
FILTERING
Only the mean and variance of the noise is required
g-vector by using the image elements in first row of g(x,y)
-dimensions
H –The matrix H then has dimensions MNX MN
The degradation model in vector-matrix form
The objective function
Subject to the constraint
111 MNMNMNMNMN ηfHg
21
0
1
0
2
)],([
M
x
N
y
yxfC
ηHfg
ηf,
22
ηHfg ](https://image.slidesharecdn.com/dip-180827010515/85/Digital-Image-Processing-9-320.jpg)