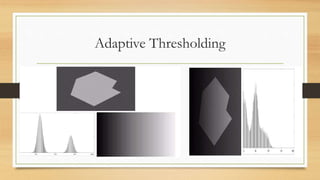
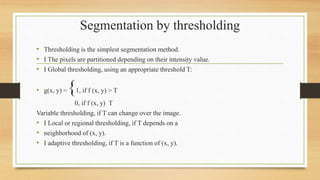
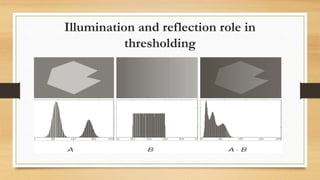
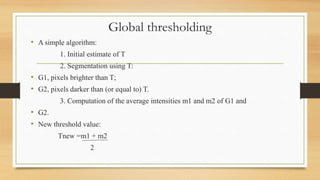
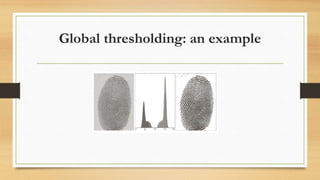
The document discusses different methods of thresholding for image segmentation. It begins by introducing thresholding as a simple segmentation technique that separates pixels into binary regions based on intensity values. It then describes several types of thresholding including global, variable, local/regional, and adaptive thresholding. The document also discusses challenges of thresholding, such as not considering pixel relationships, and methods for choosing optimal threshold values including analyzing the image histogram and using Otsu's method to maximize inter-class variance. It concludes by introducing local and adaptive thresholding techniques to address issues with uneven illumination.

![Otsu’s method
• Otsu’s method is aimed in finding the optimal value for the global
threshold.
• It is based on the interclass variance maximization.
• Well thresholded classes have well discriminated intensity values.
• M × N image histogram:
• L intensity levels, [0, . . . , L − 1];
• ni #pixels of intensity i :](https://image.slidesharecdn.com/dip-180830170110/85/Digital-Image-Processing-12-320.jpg)