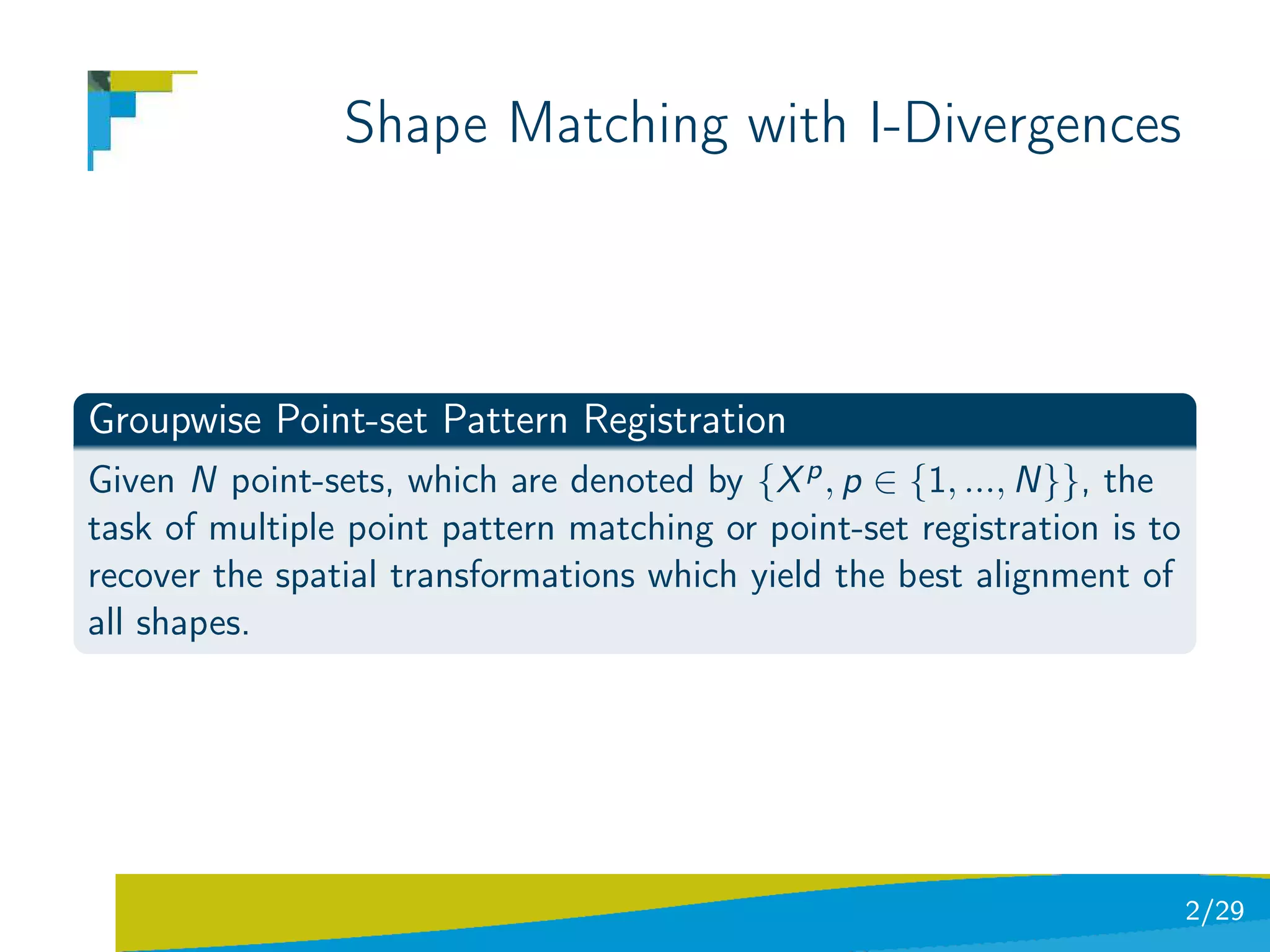
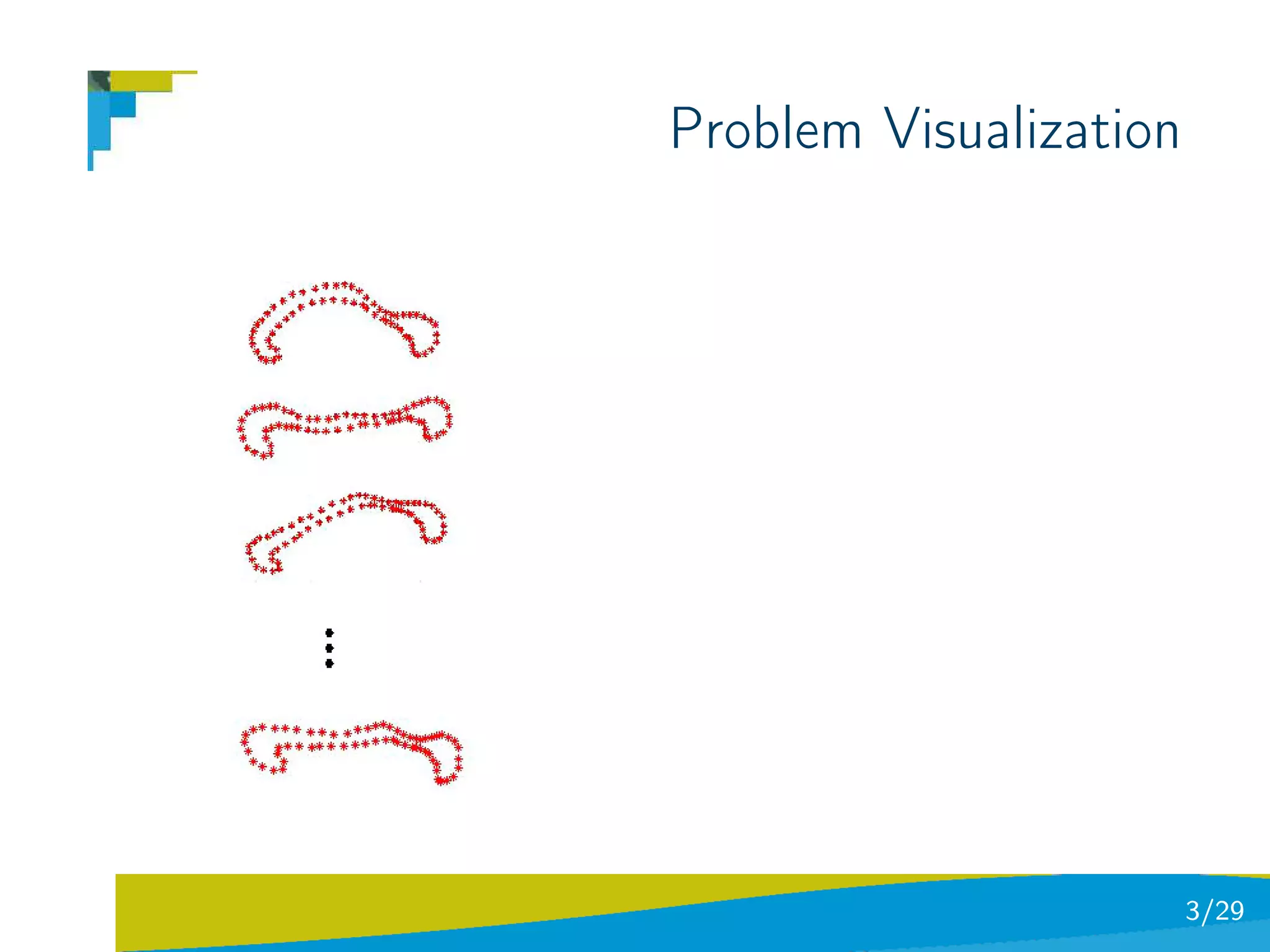
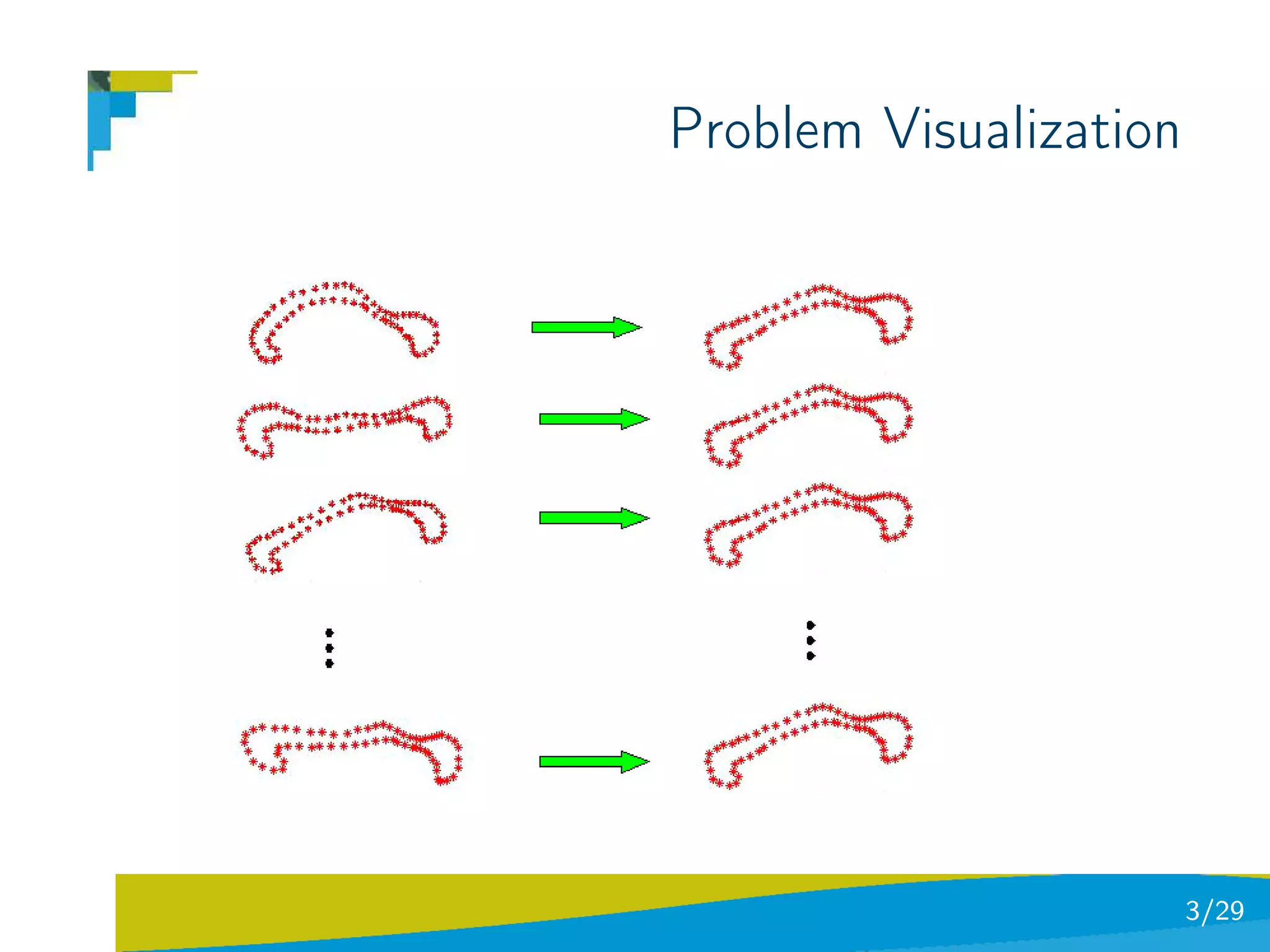
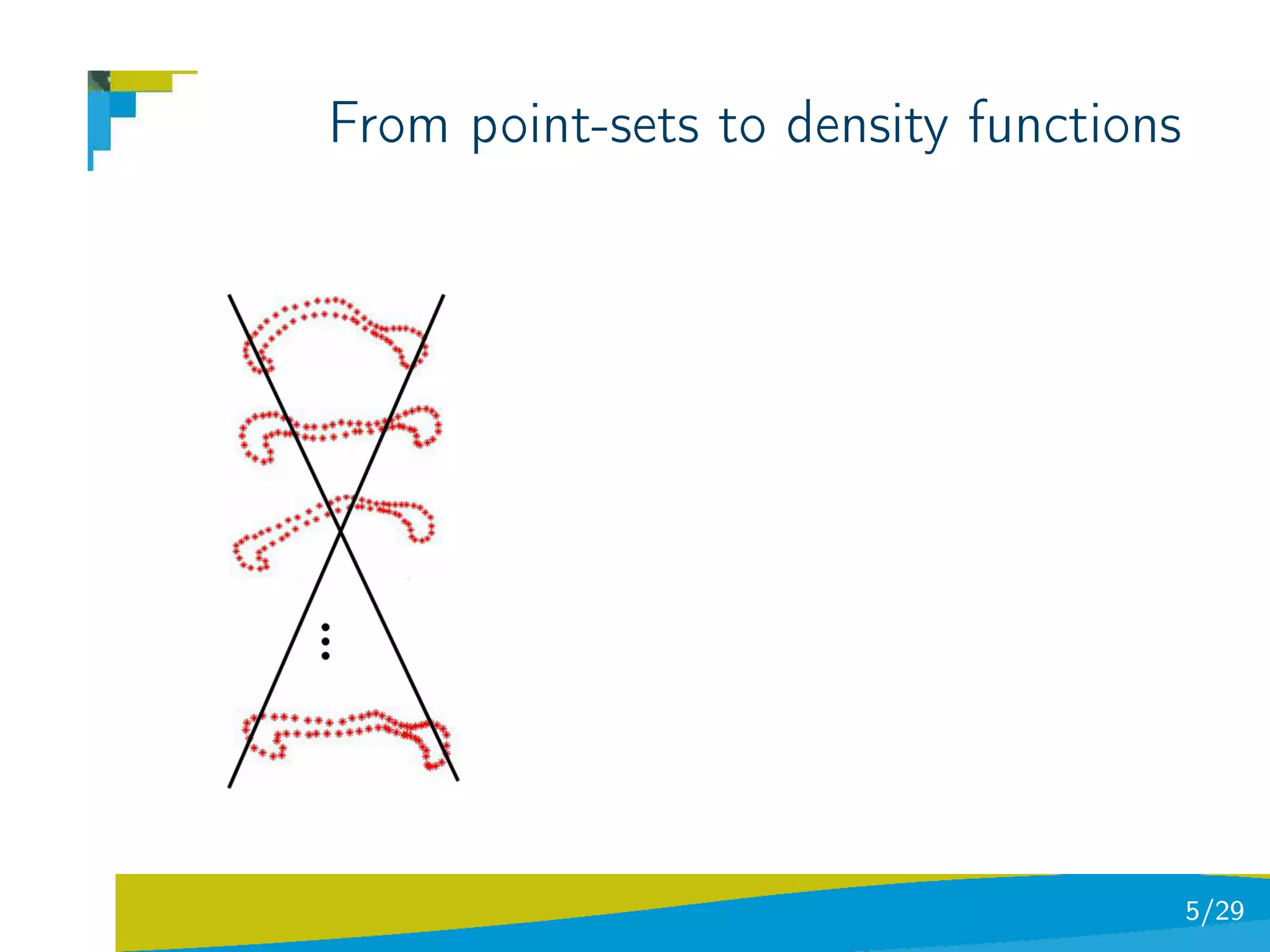
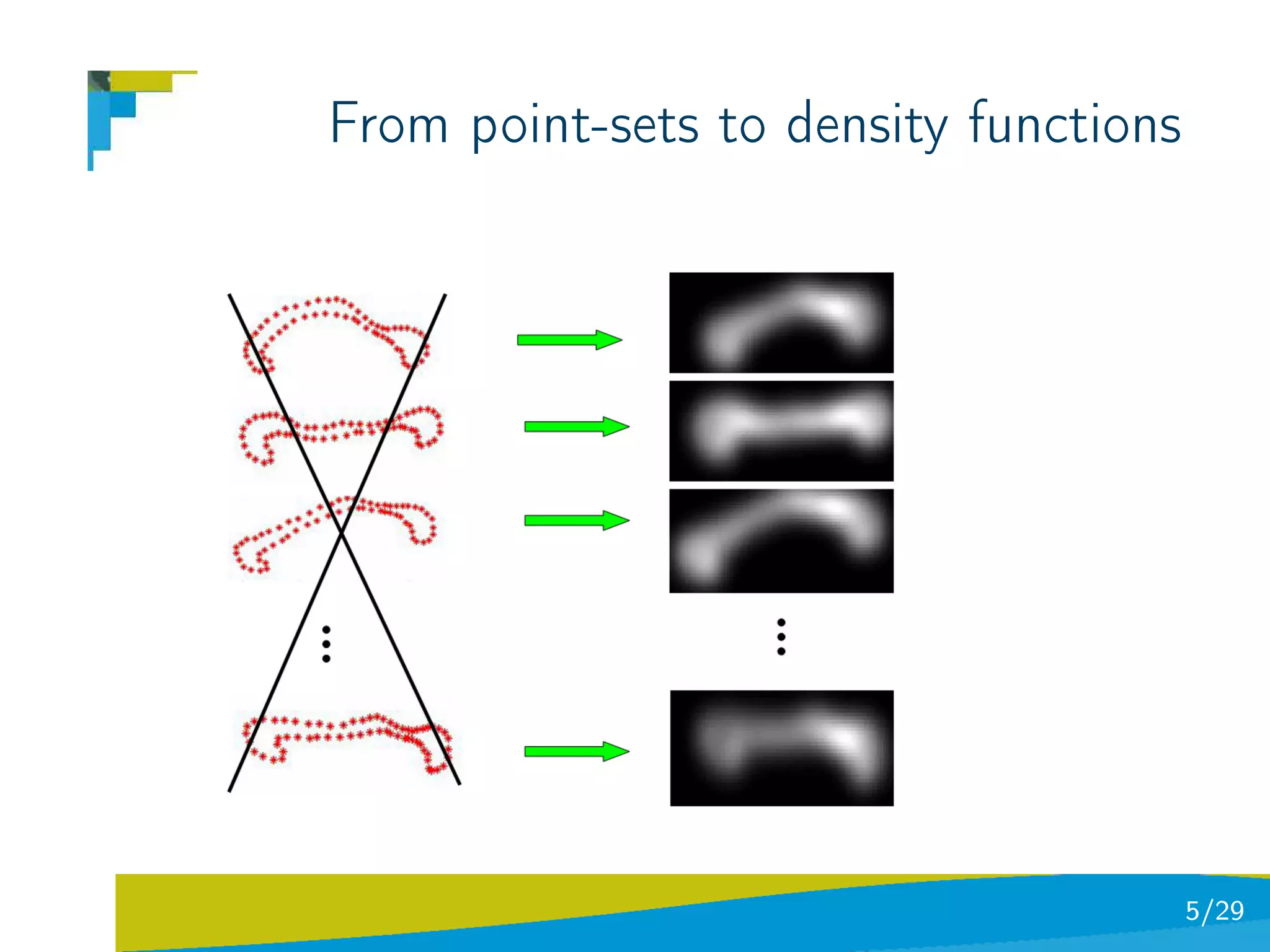
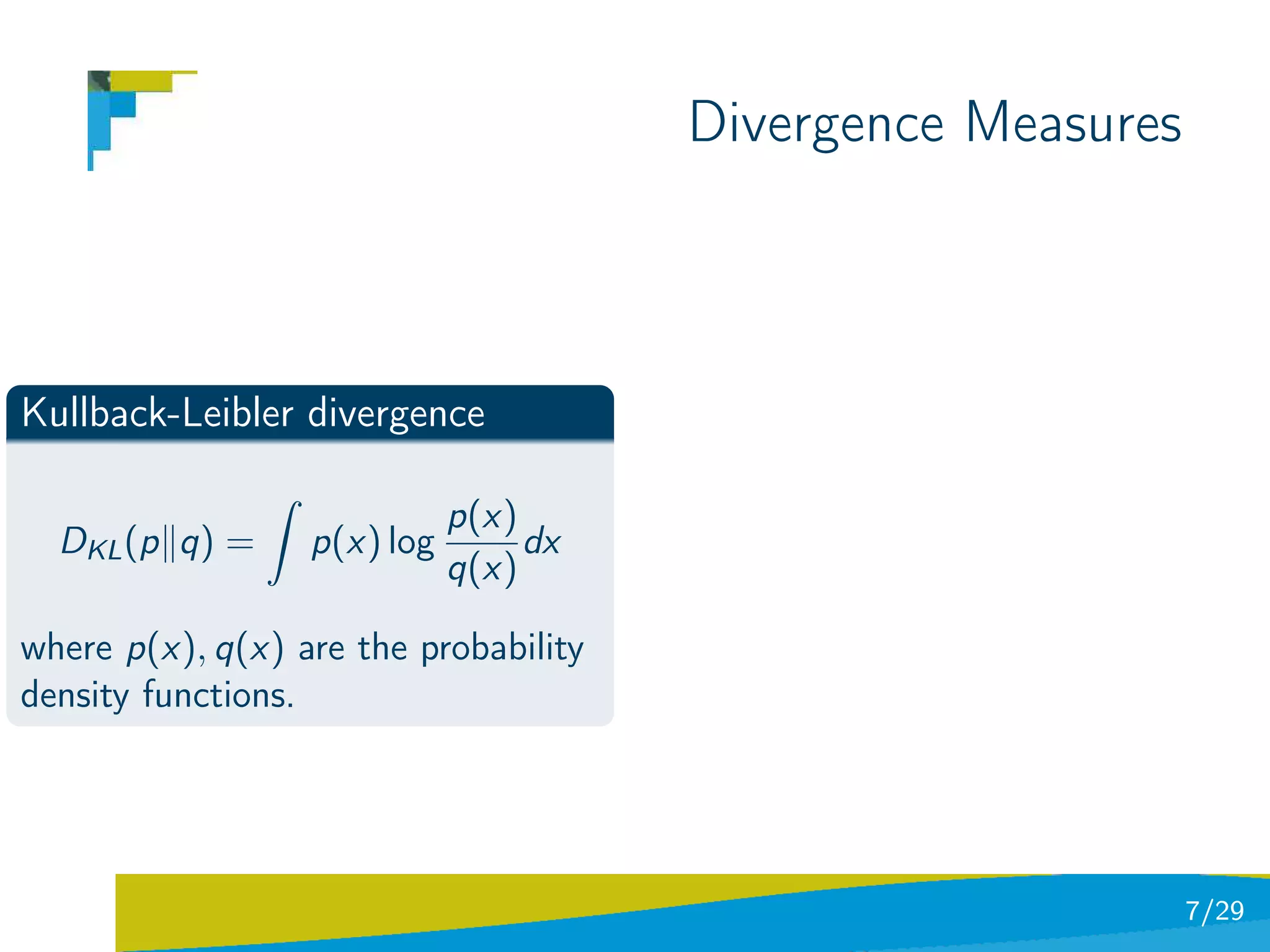
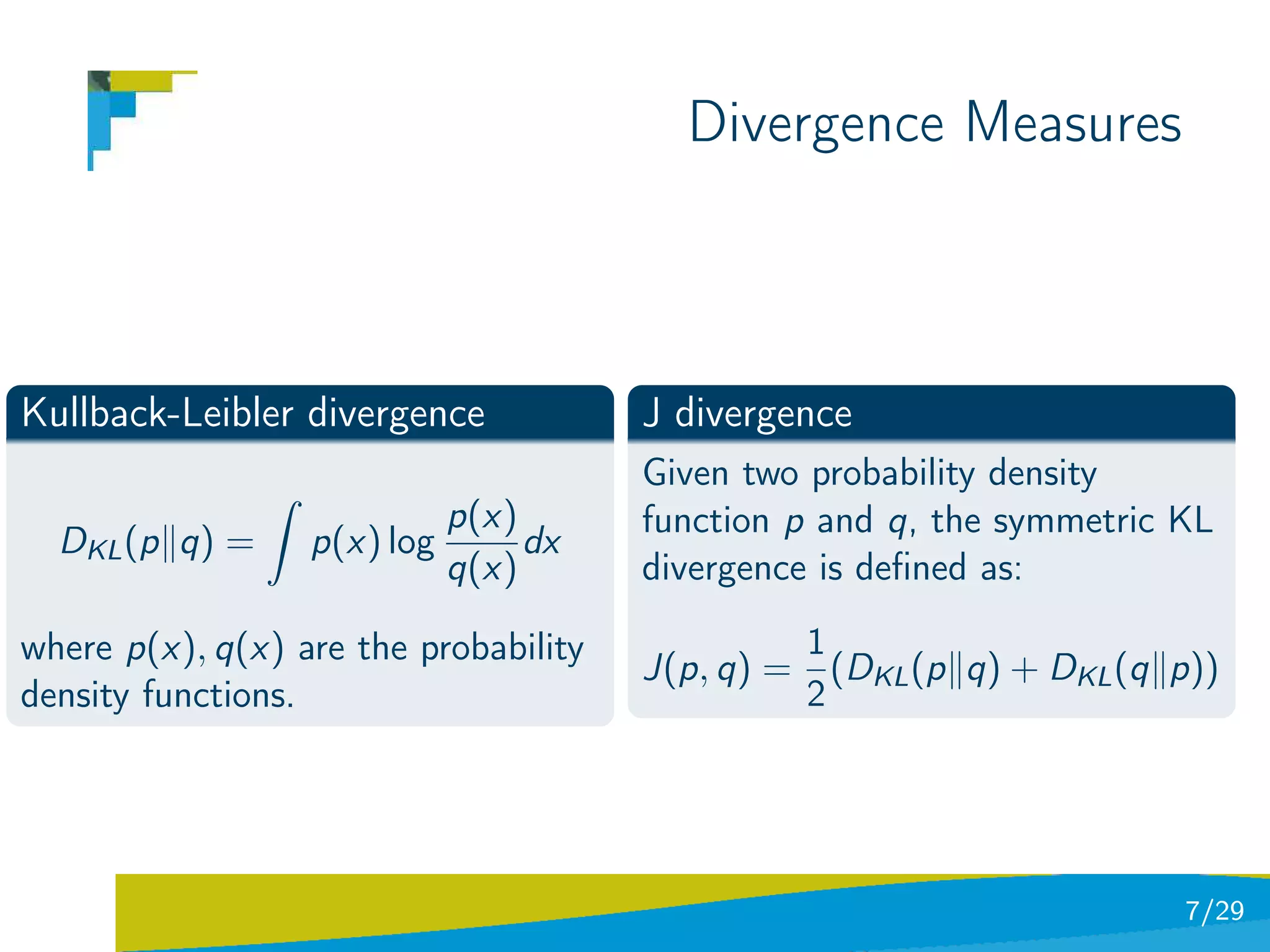
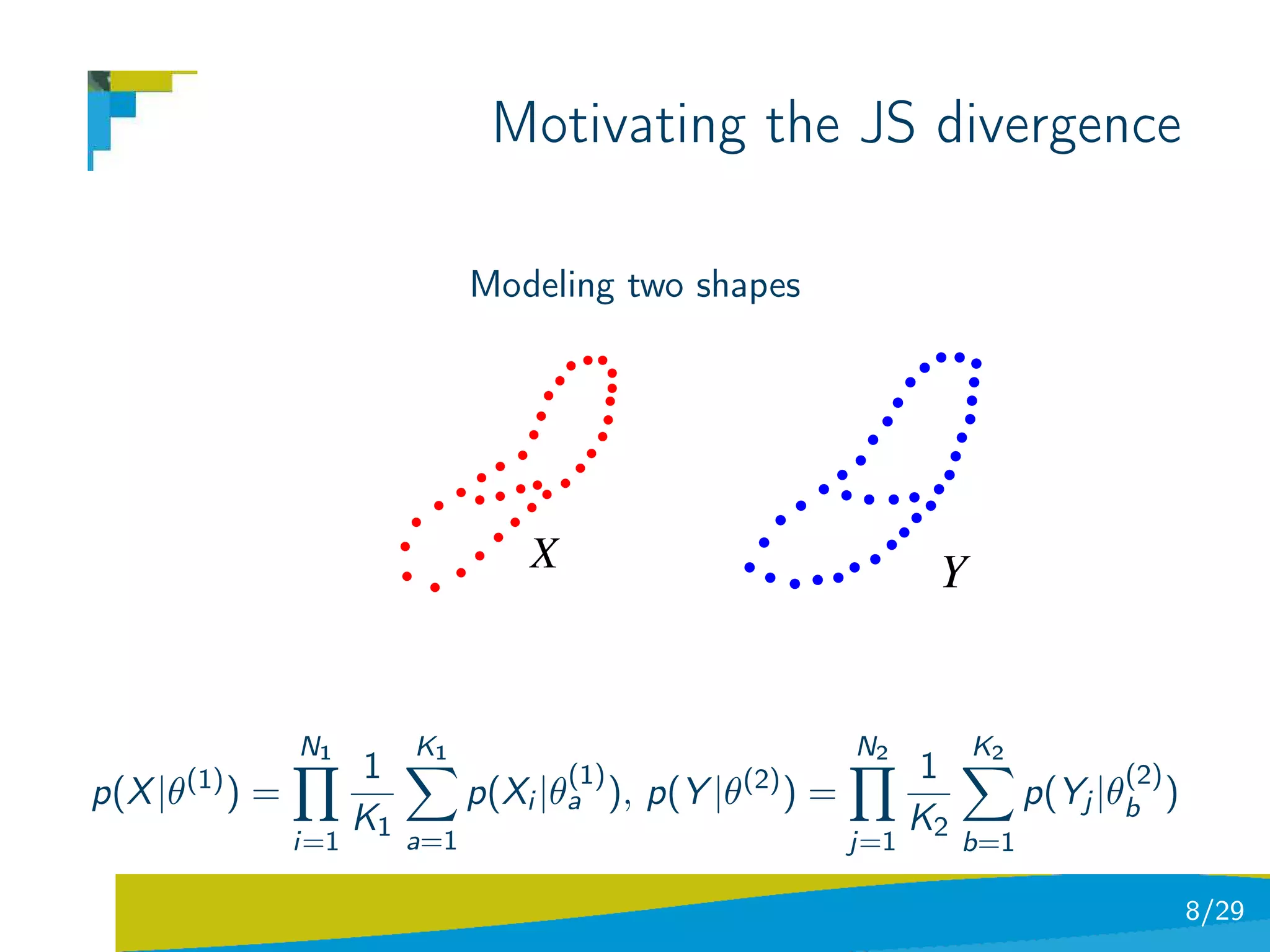
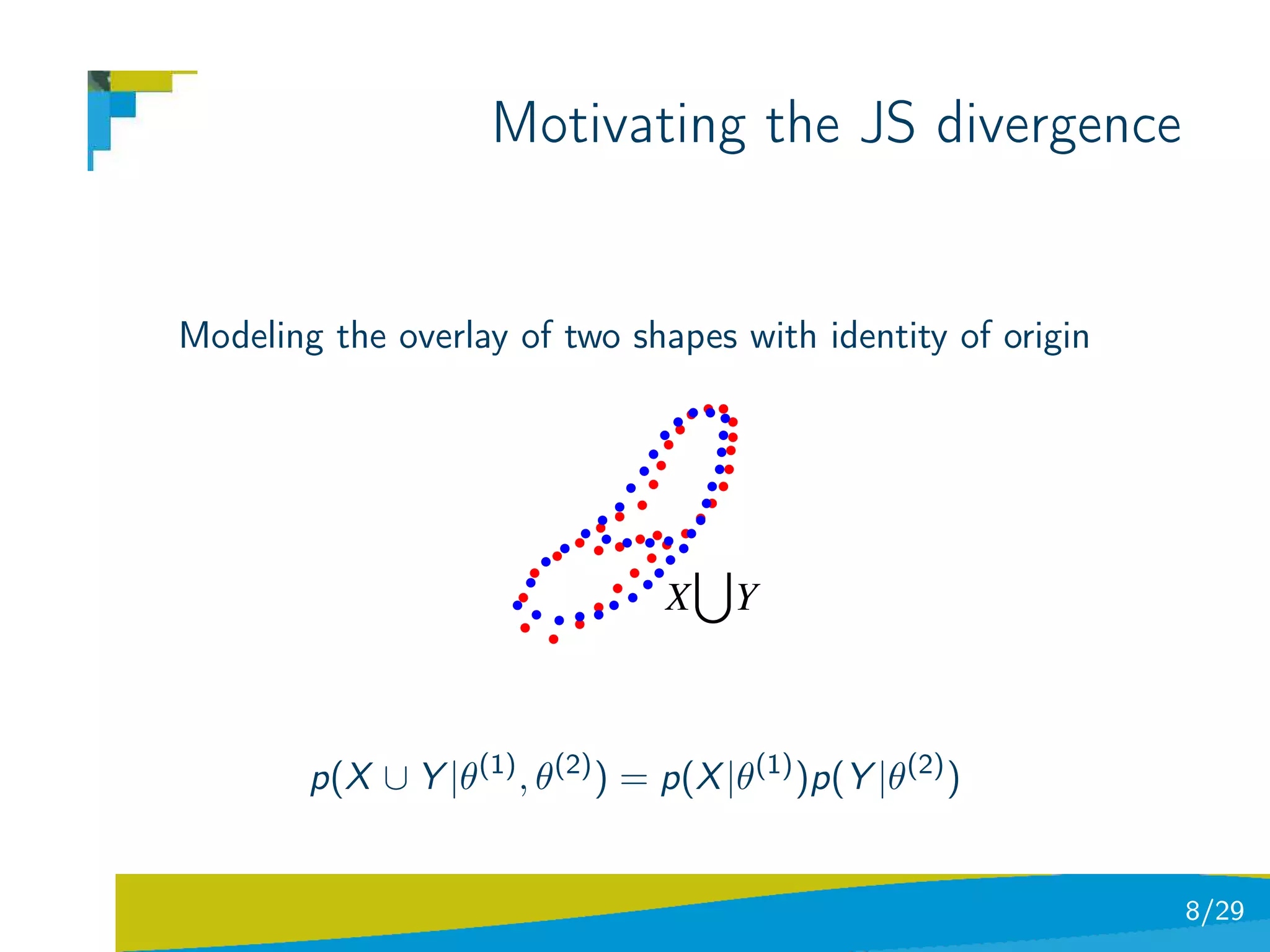
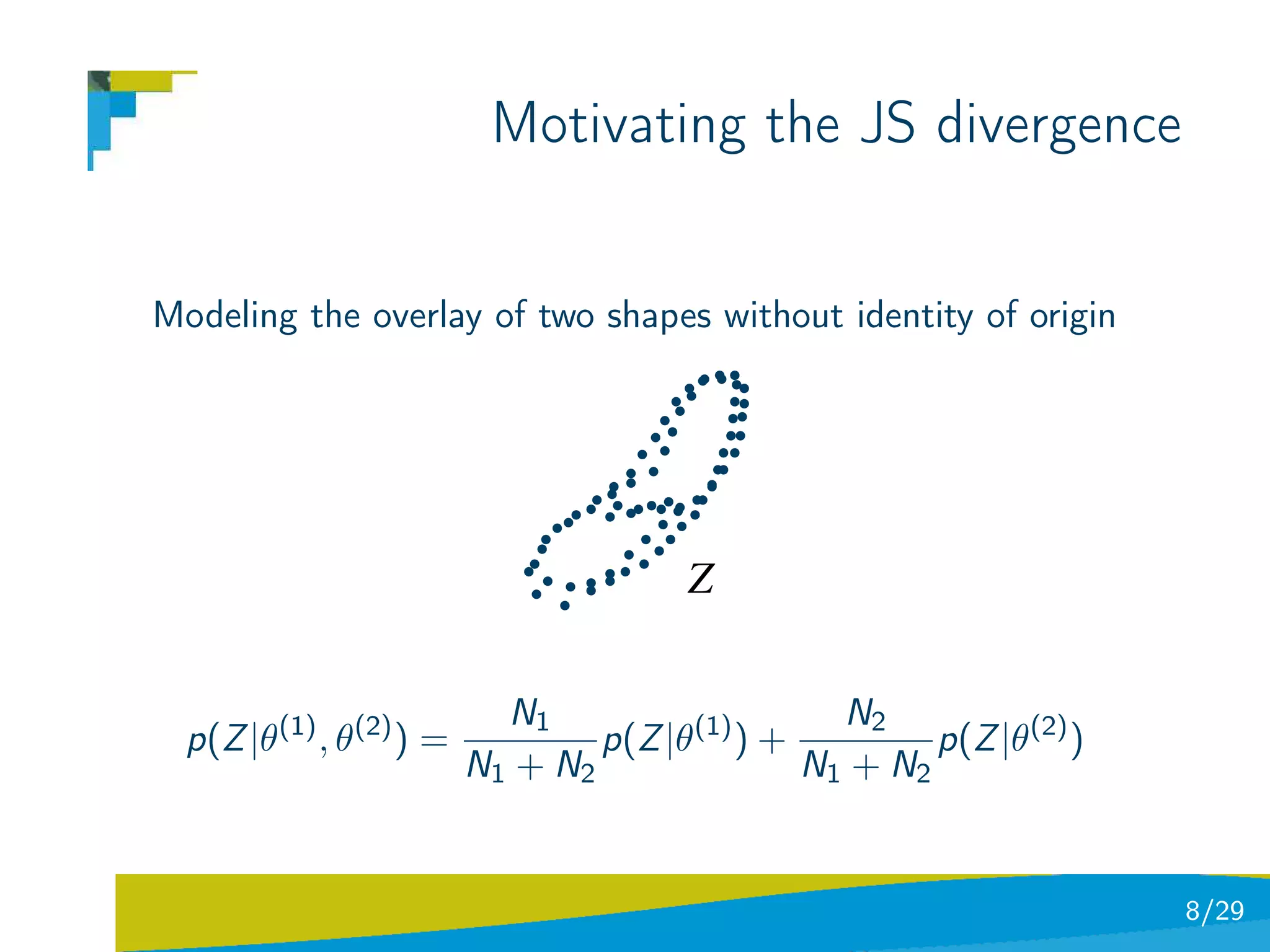
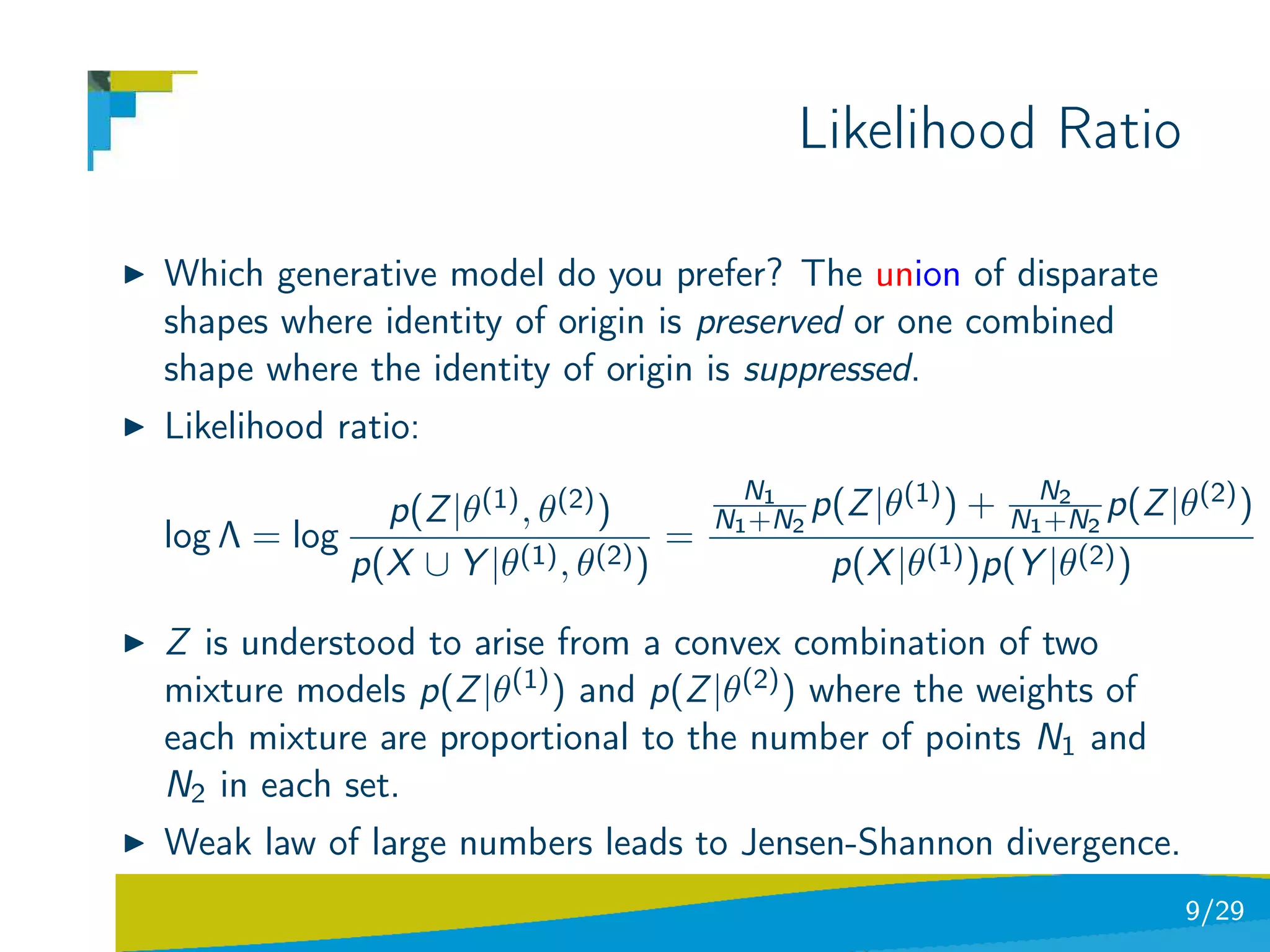
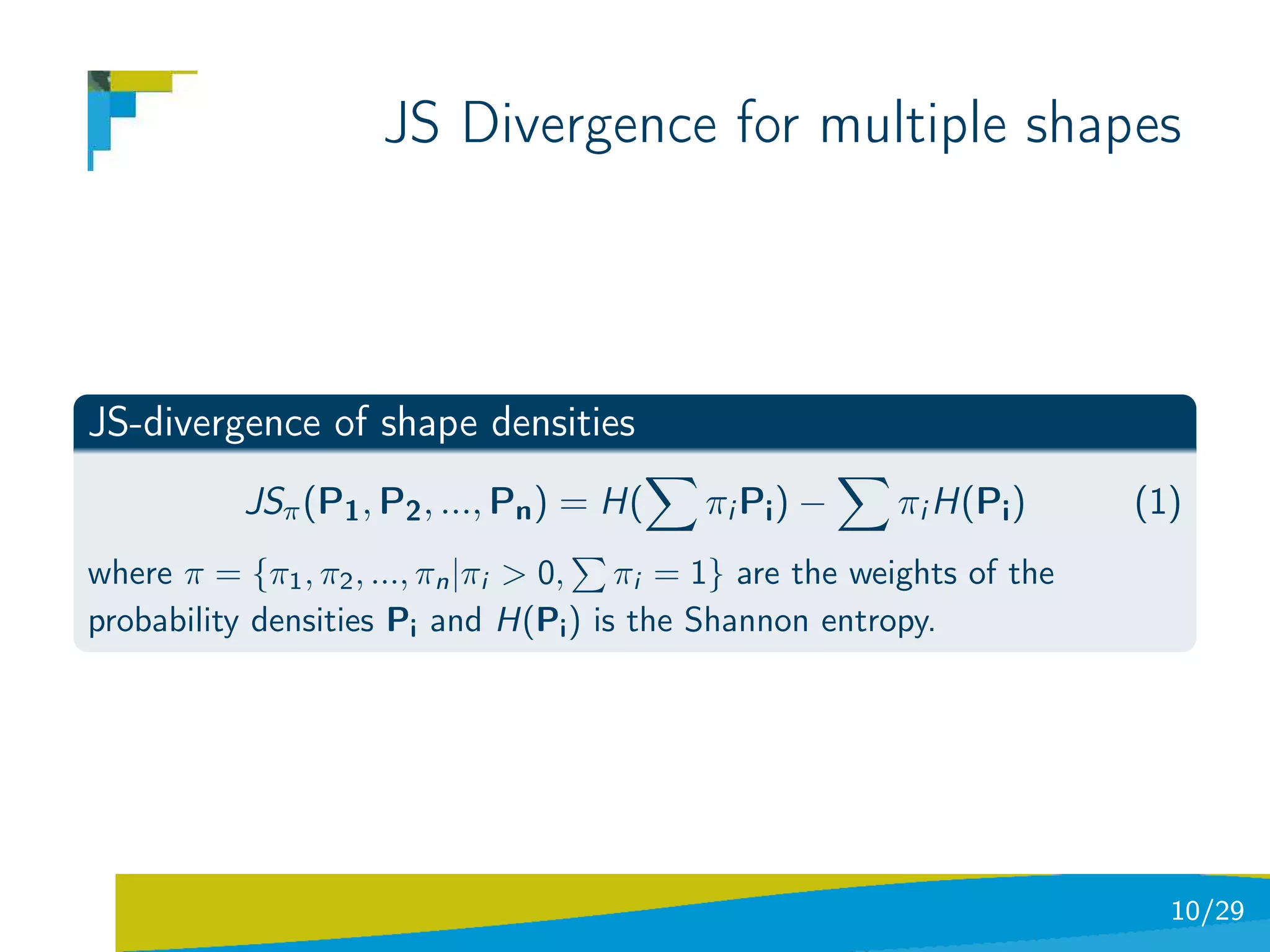
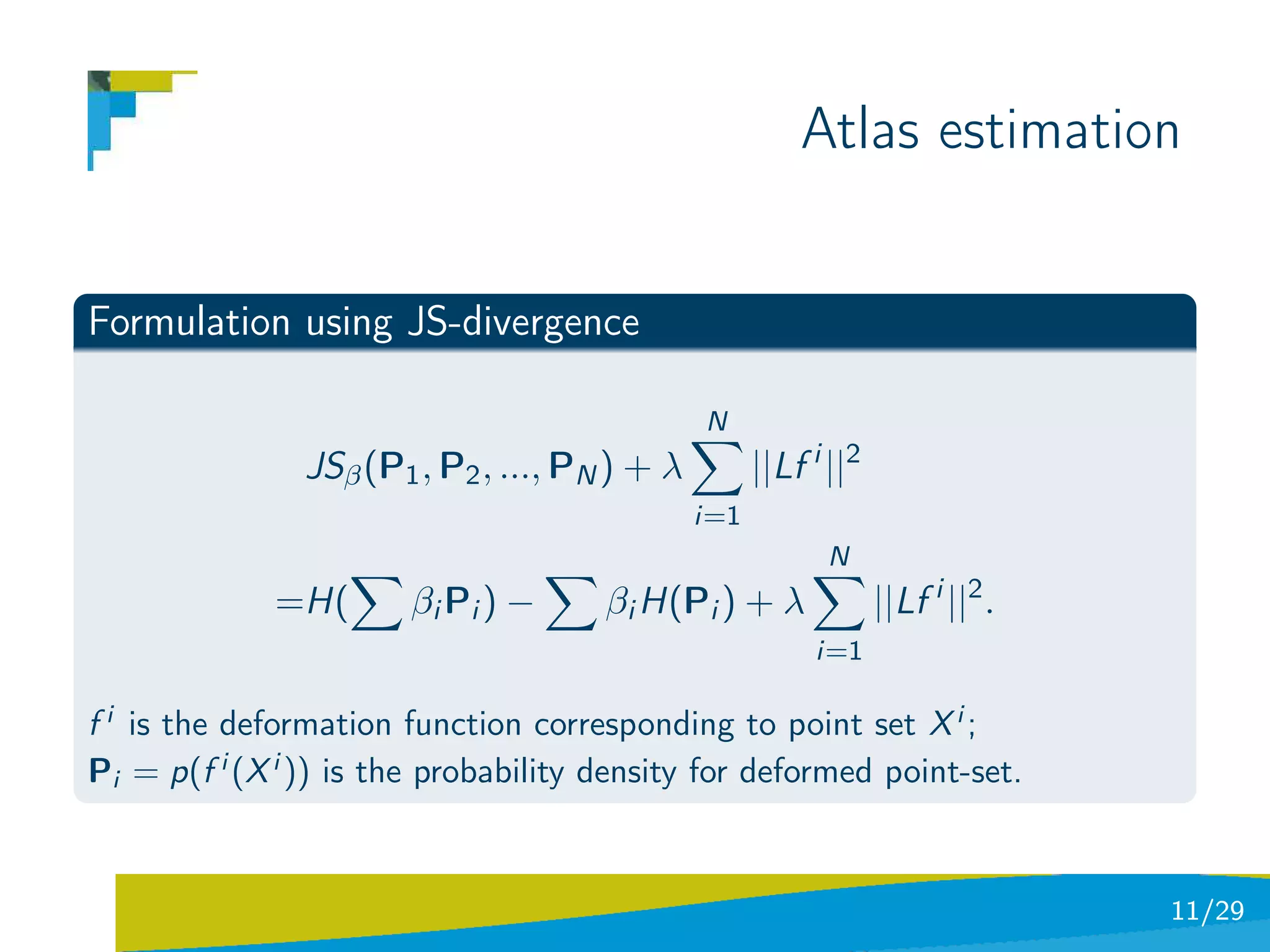
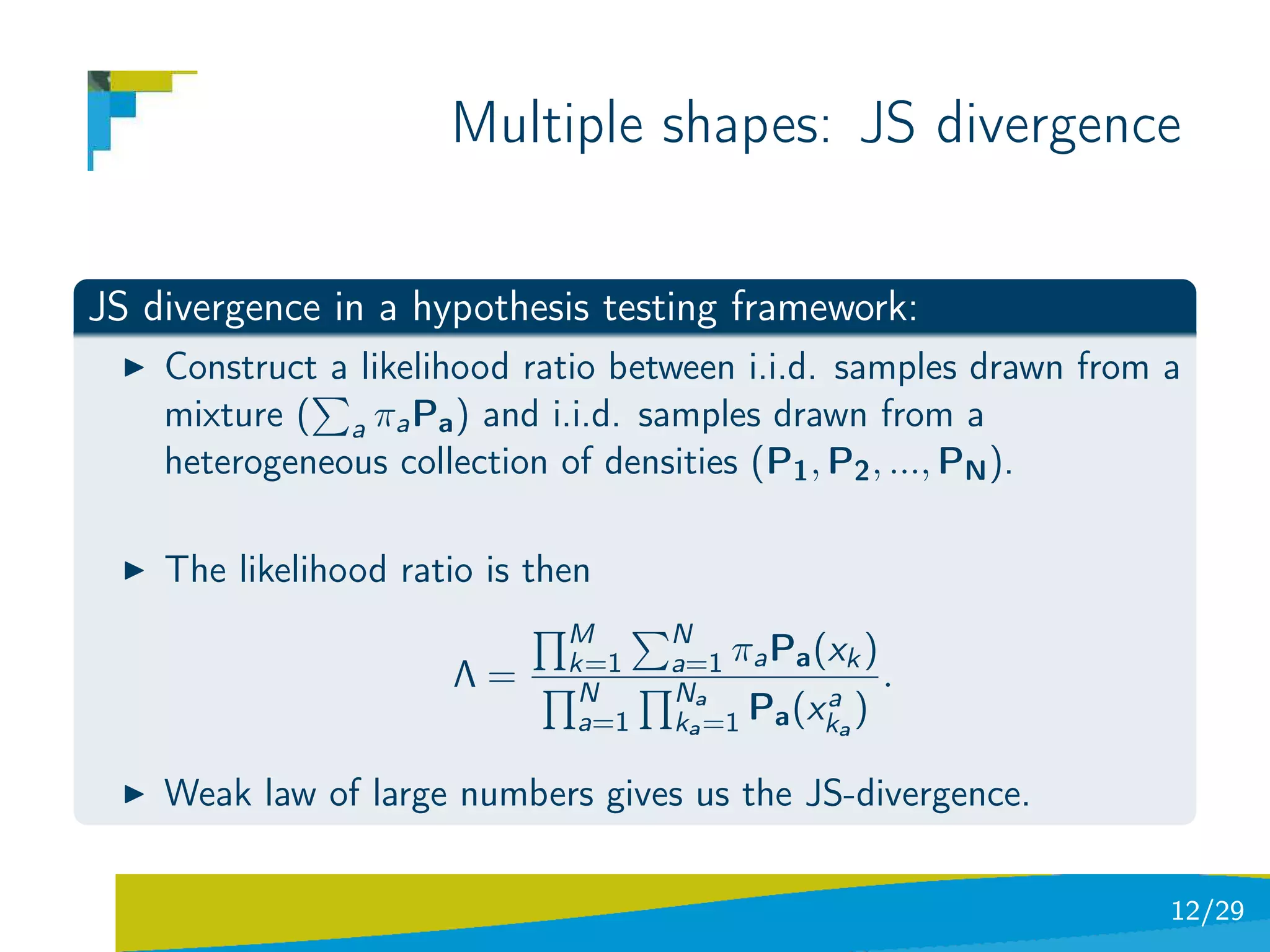
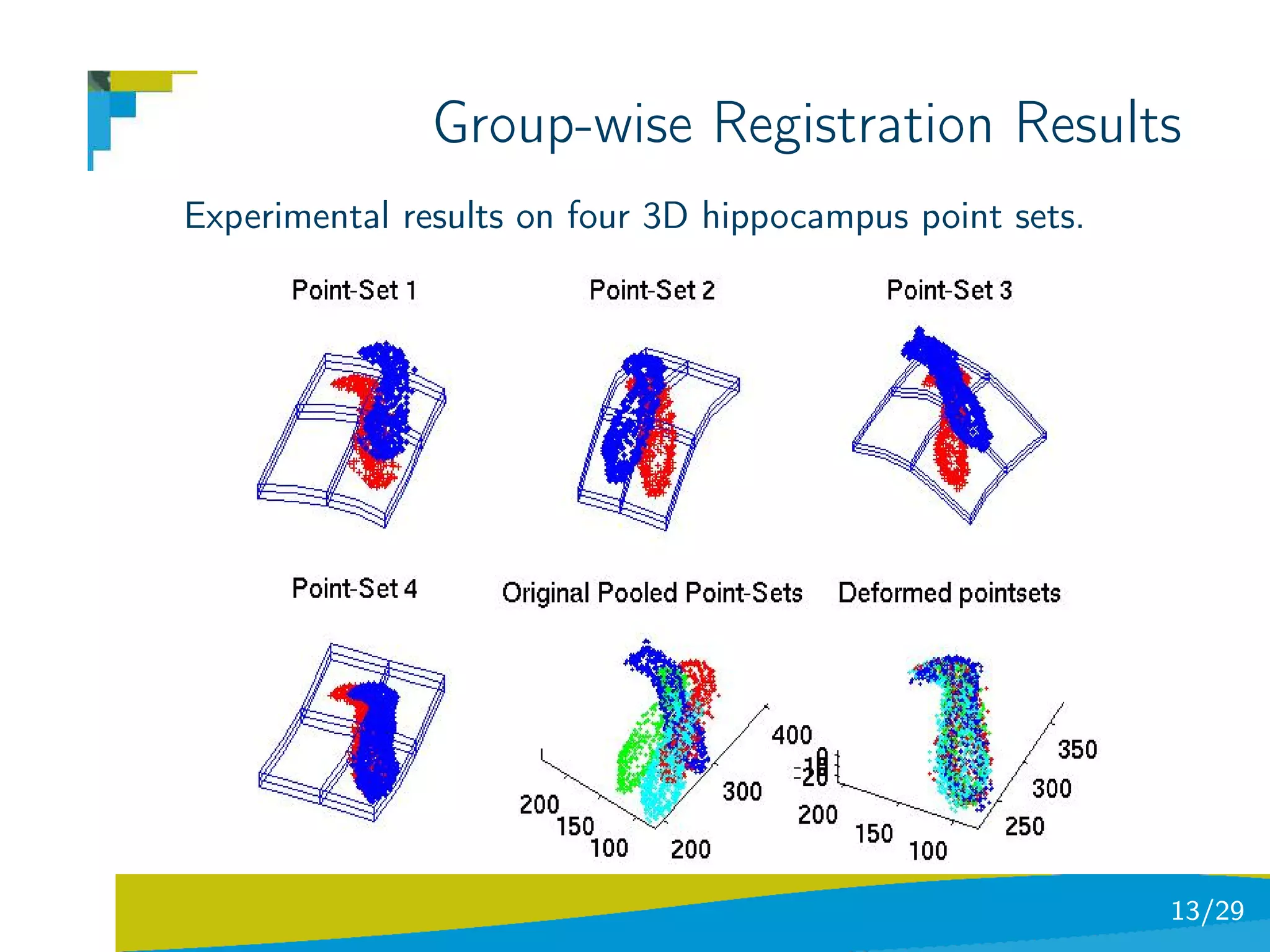
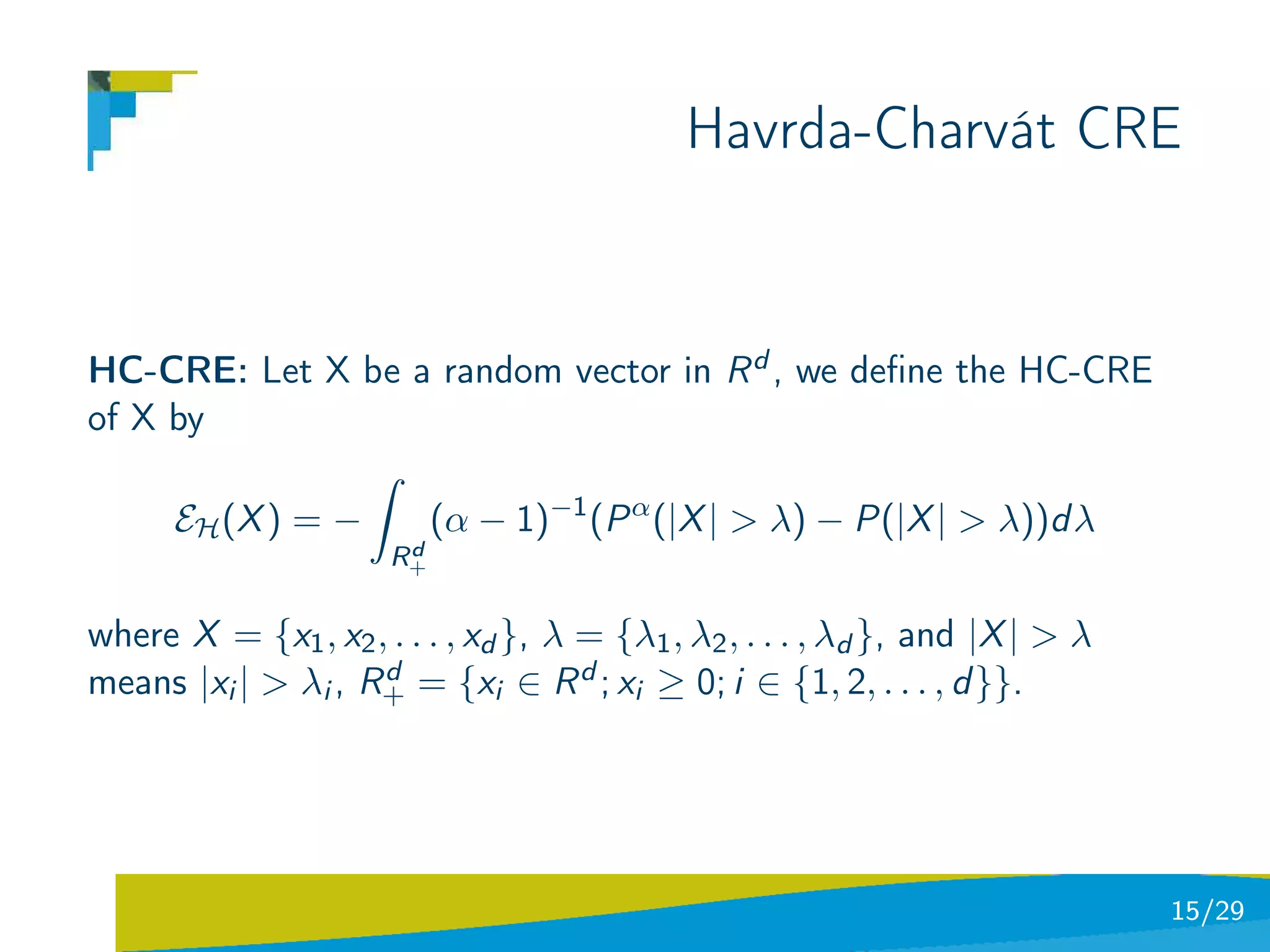
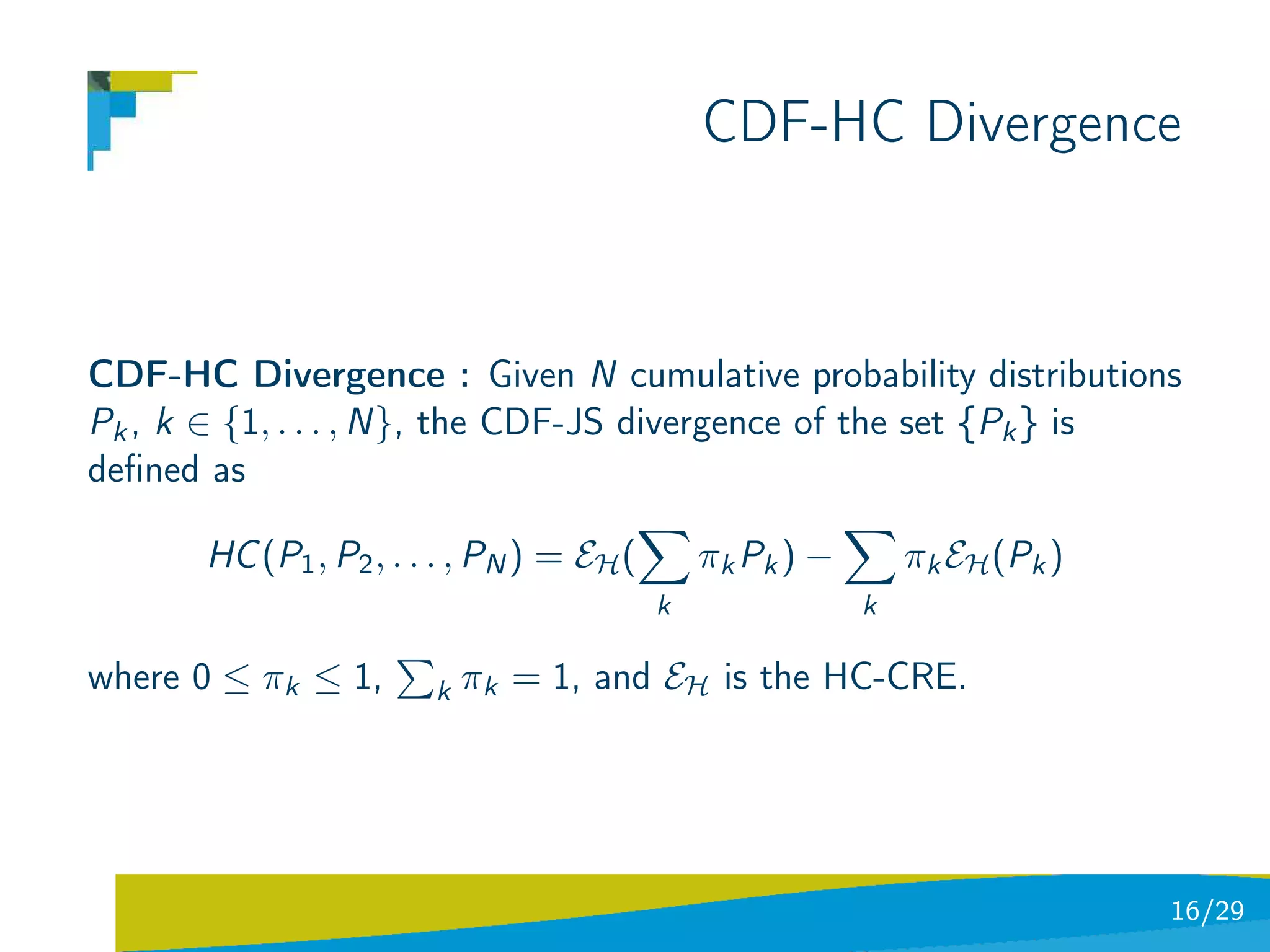
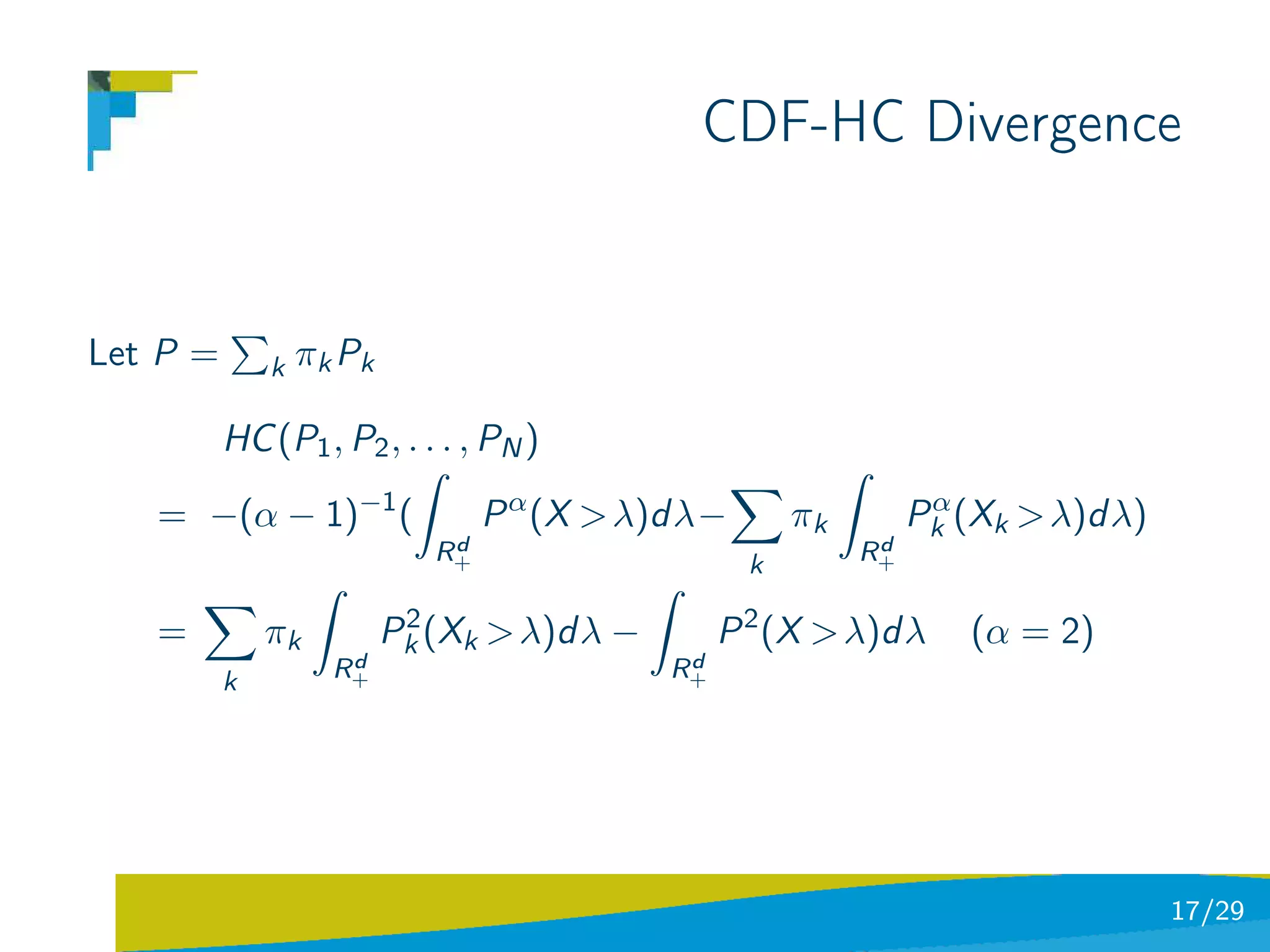
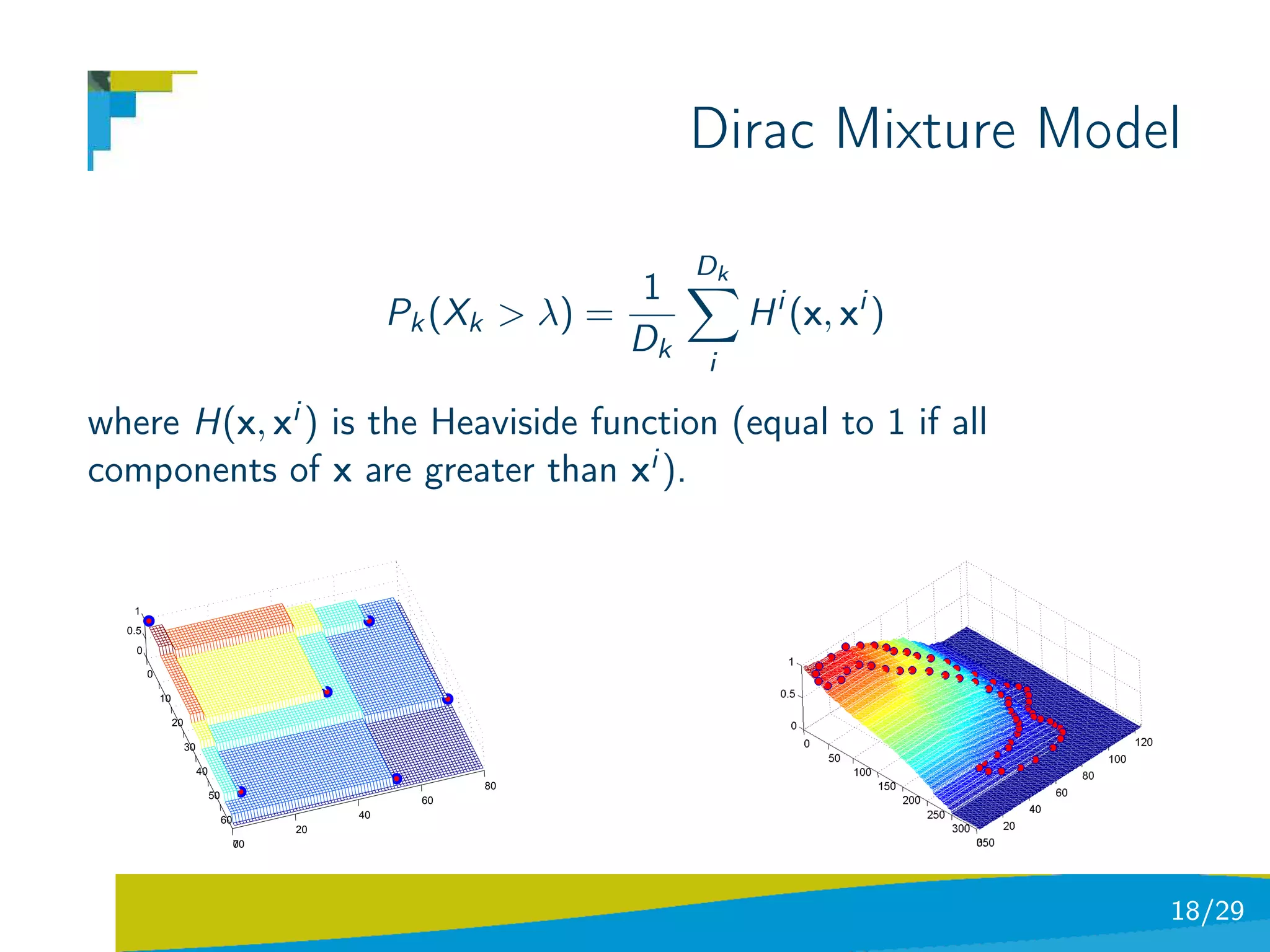
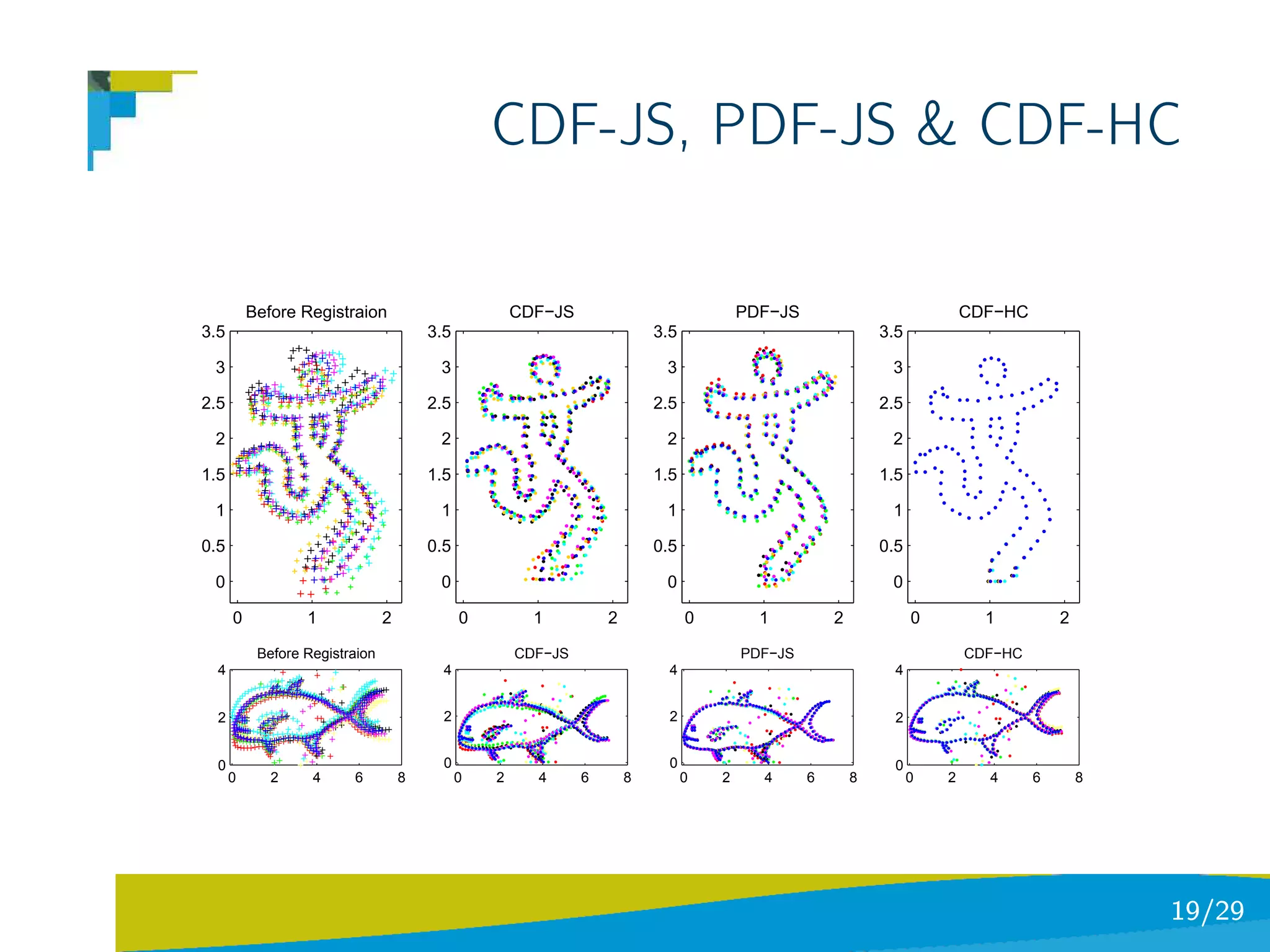
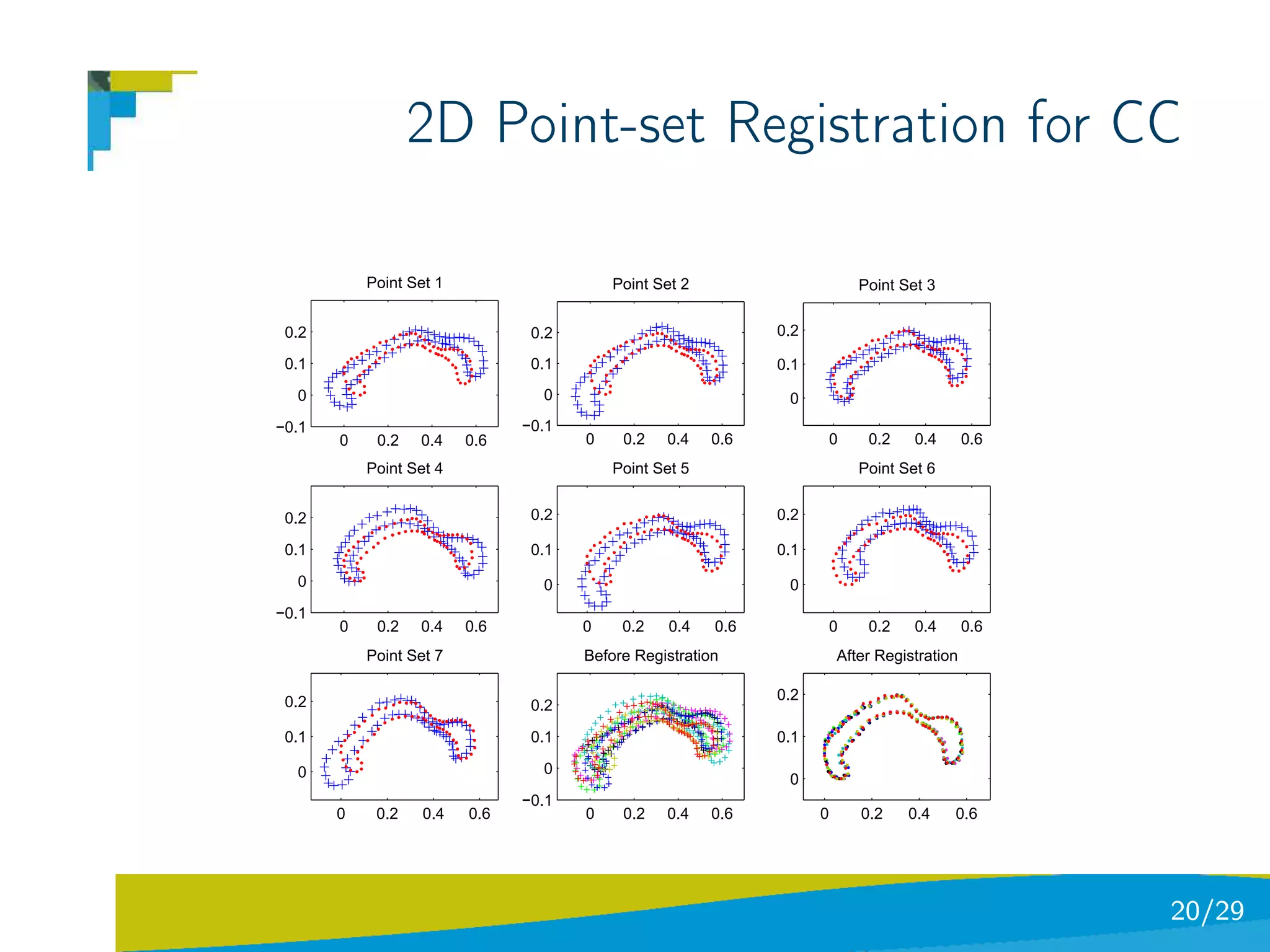
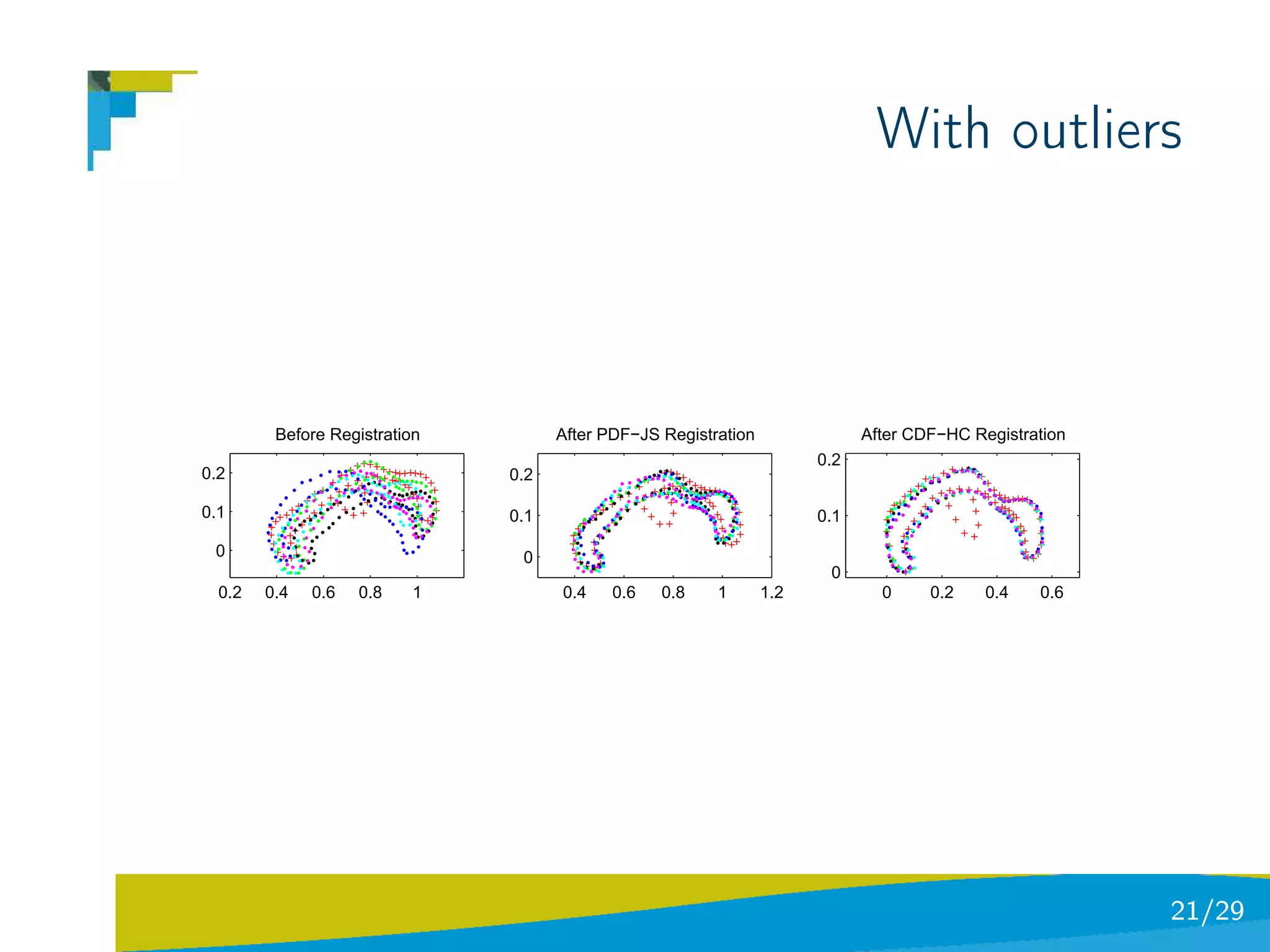
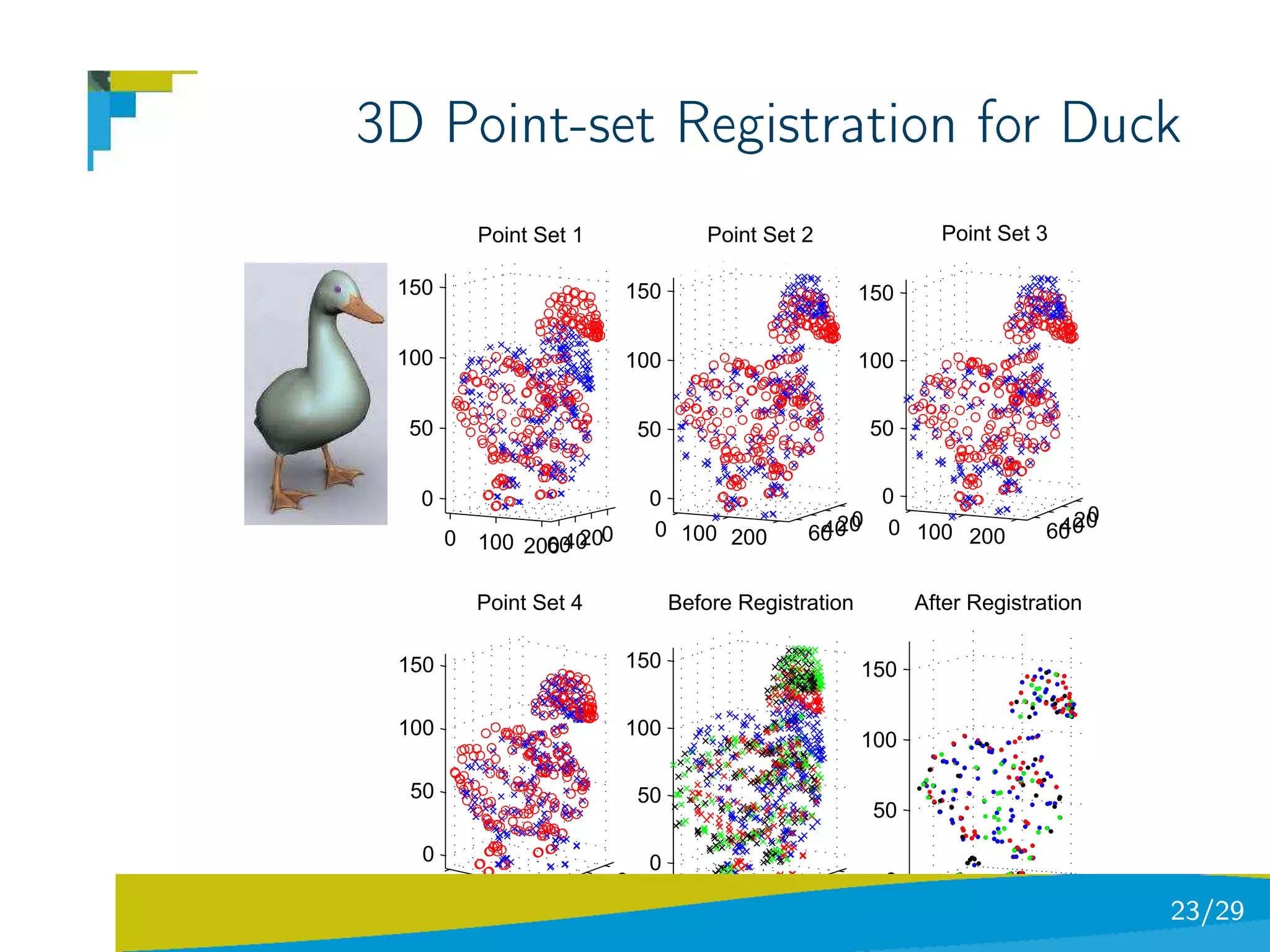
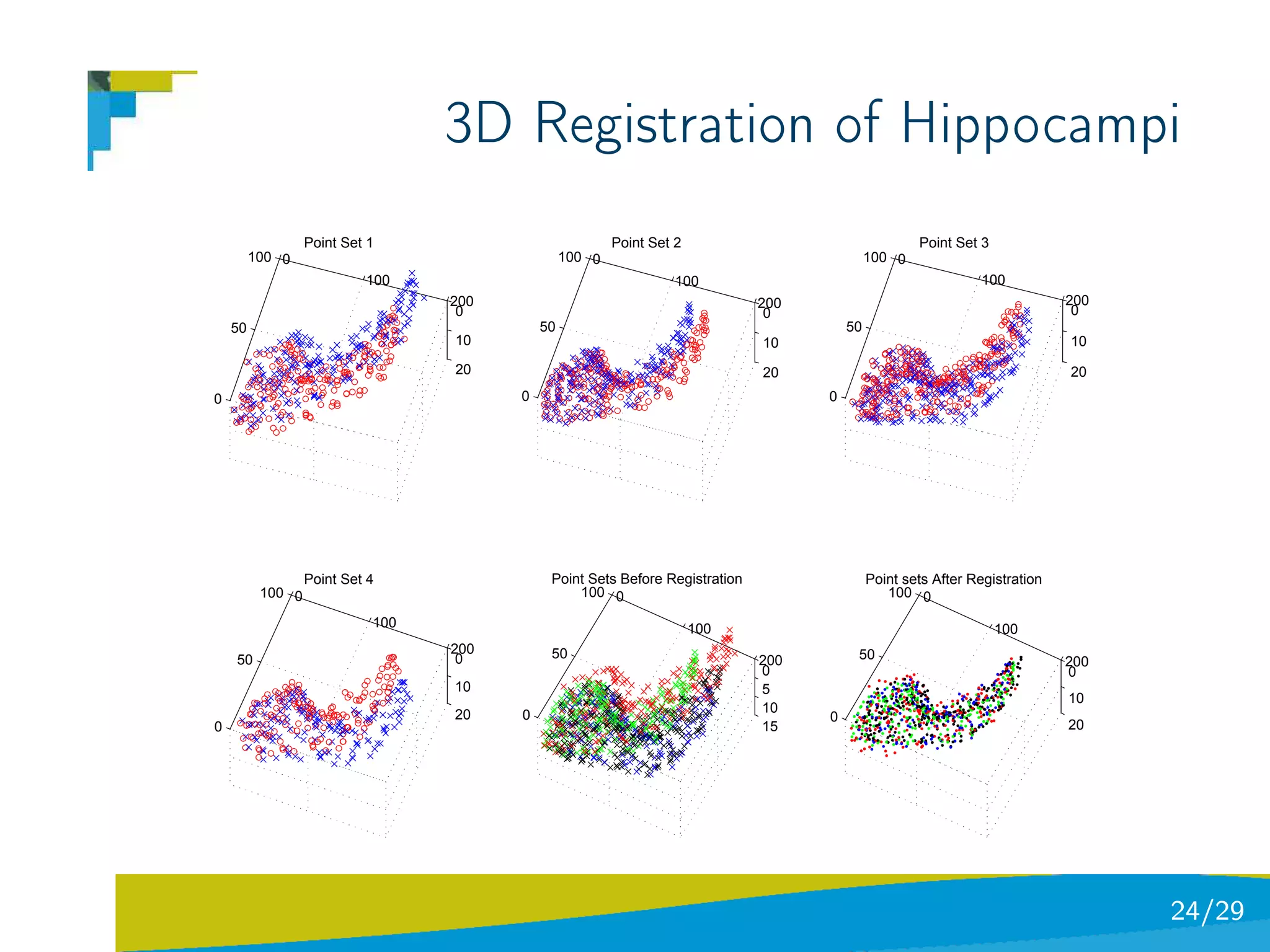
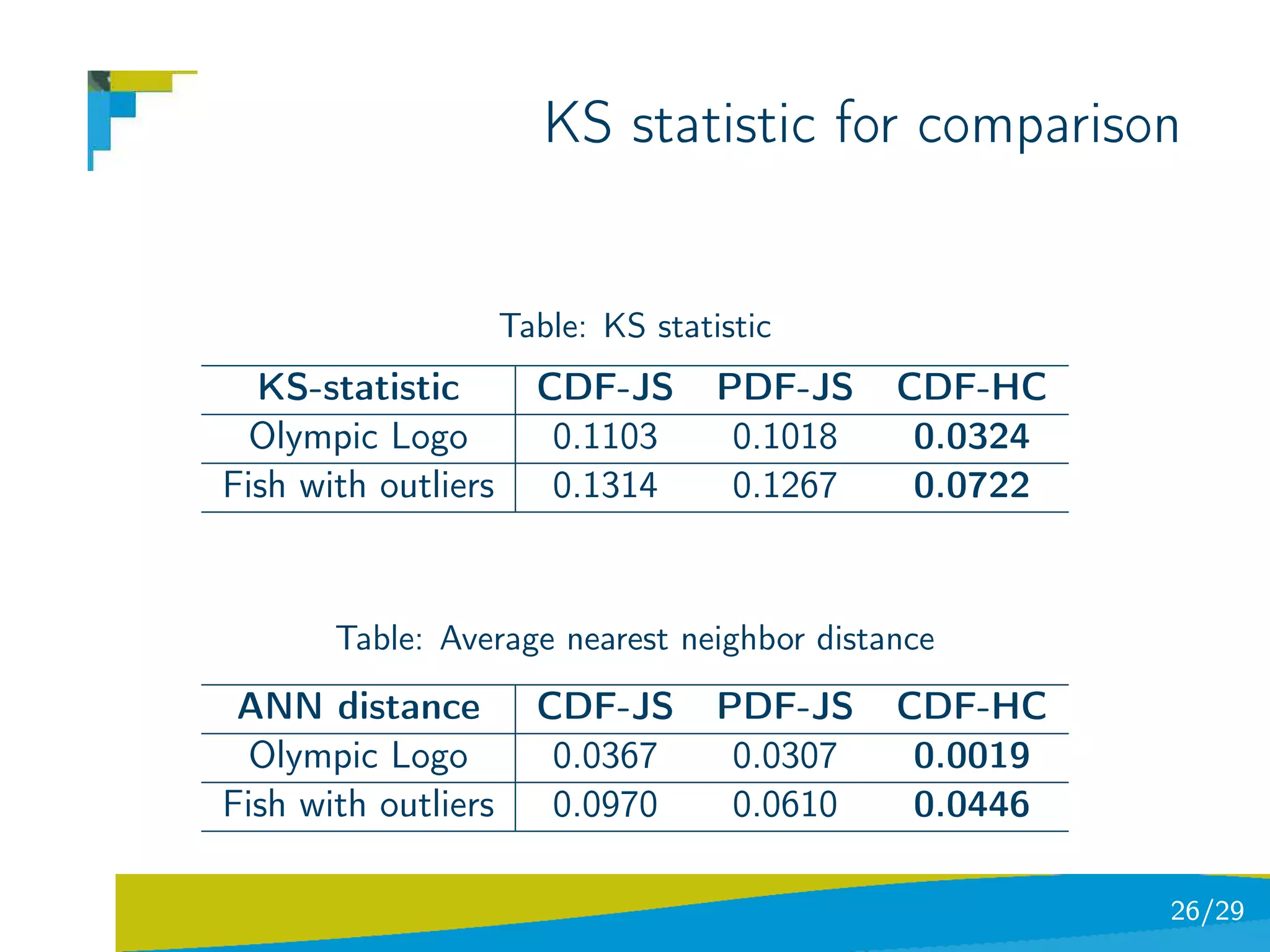
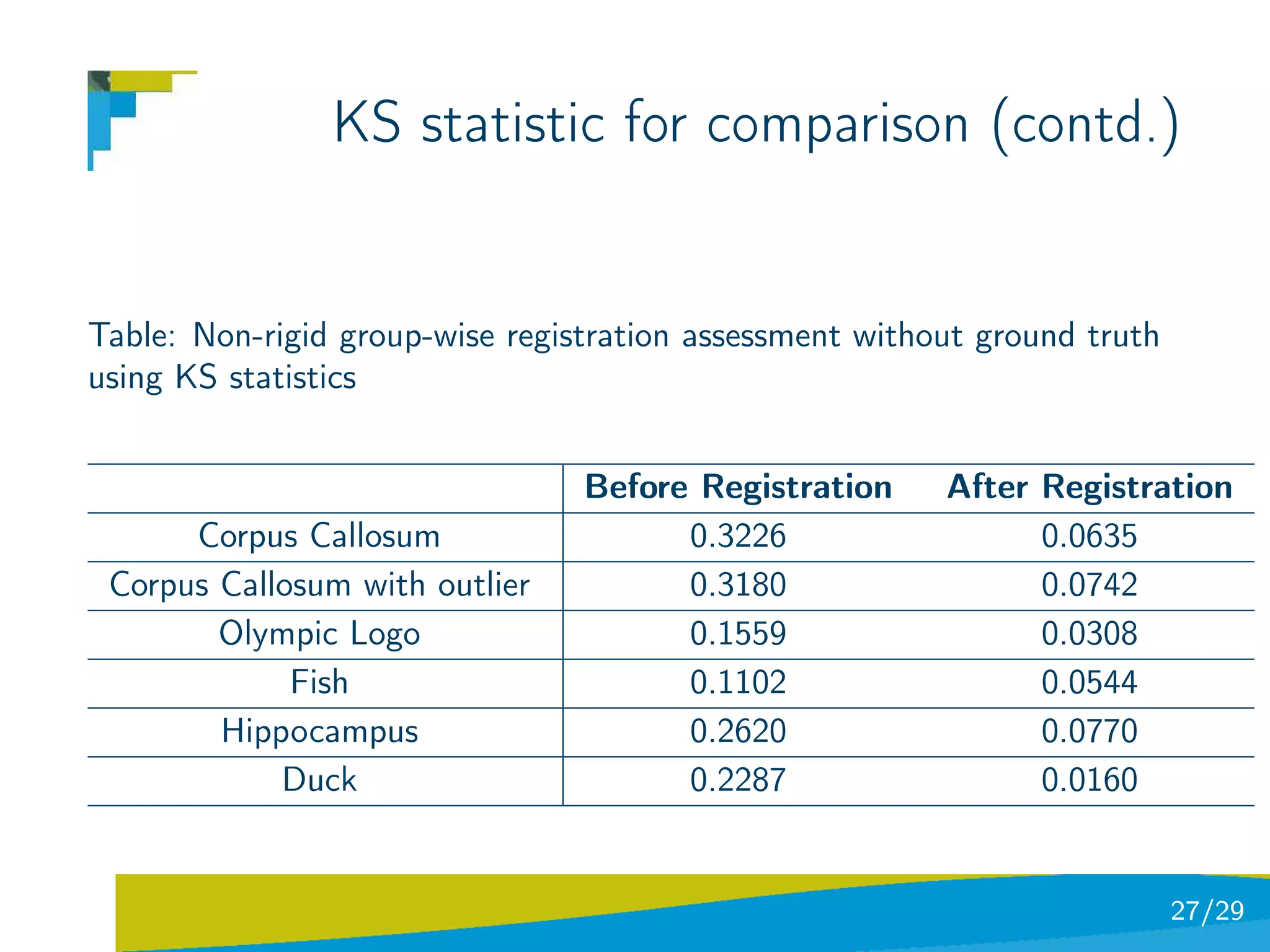
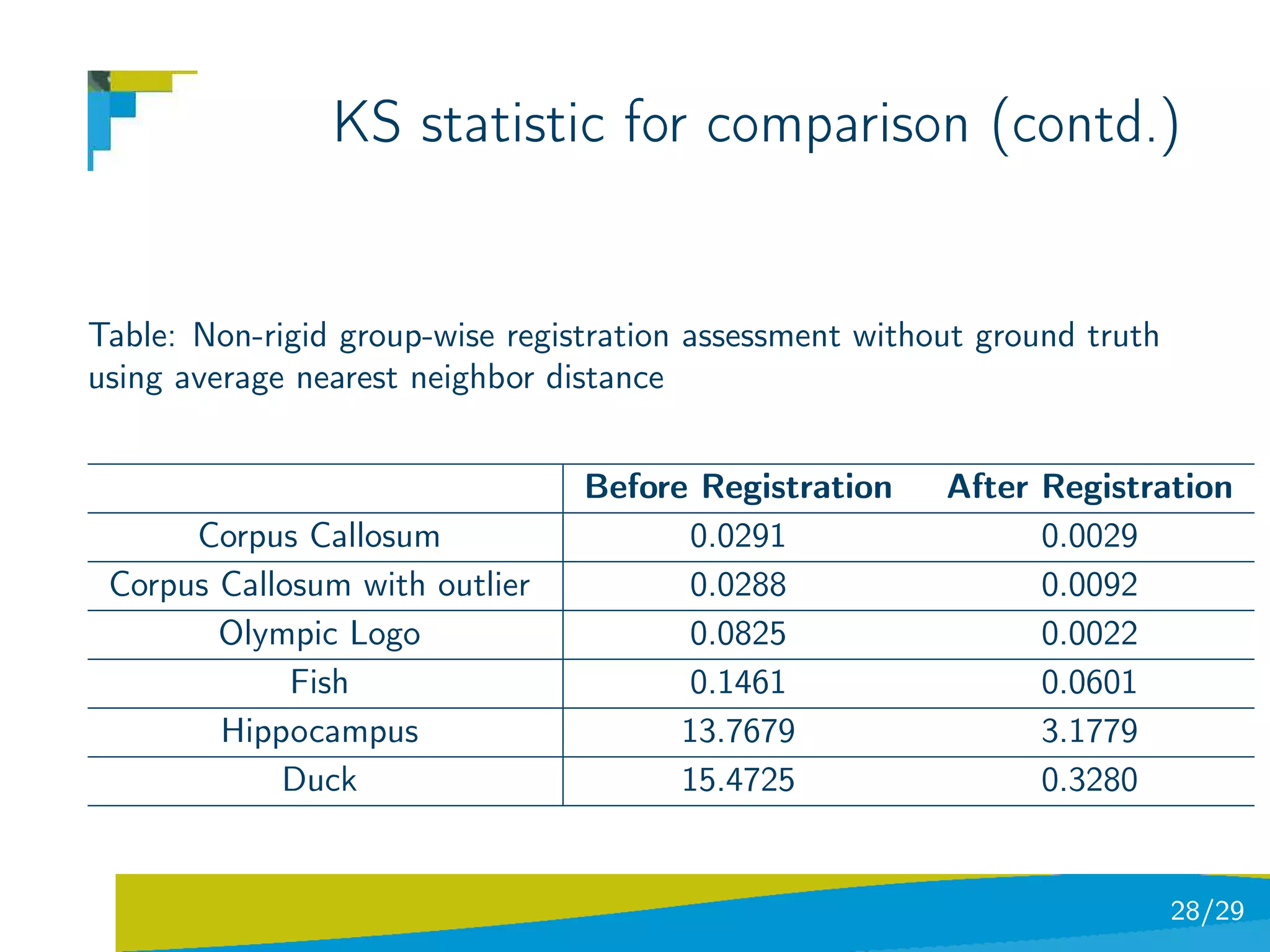
The document discusses using divergence measures like the Jensen-Shannon divergence to align multiple point sets represented as probability density functions. It motivates using the JS divergence by modeling point sets as mixtures of density functions, and shows how the likelihood ratio between models leads to the JS divergence. It then formulates the problem of group-wise point set registration as minimizing the JS divergence between density functions, combined with a regularization term. Experimental results on aligning multiple 3D hippocampus point sets are also presented.
![Shape matching via CDF I-divergences
Model each point-set by a cumulative distribution function
(CDF)
Quantify the distance among cdfs via an information-theoretic
measure [typically the cumulative residual entropy (CRE)]
Minimize the dis-similarity measure over the space of
coordinate transformation parameters
14/29](https://image.slidesharecdn.com/l5shape-matching-idivergencescvpr-110515222124-phpapp02/75/CVPR2010-Advanced-ITinCVPR-in-a-Nutshell-part-5-Shape-Matching-and-Divergences-20-2048.jpg)








































![Power%20 point[1]](https://cdn.slidesharecdn.com/ss_thumbnails/power20point1-100625081647-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)