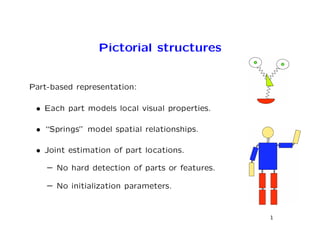
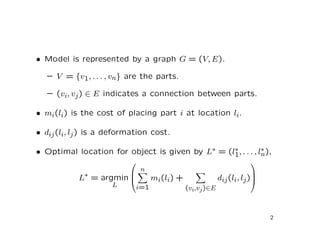
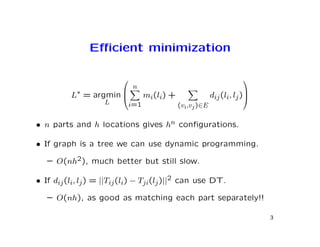
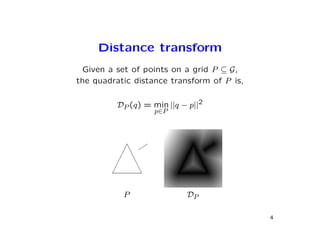
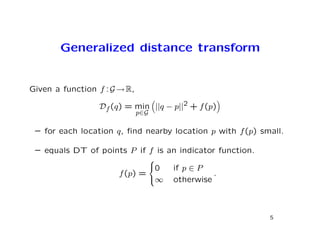
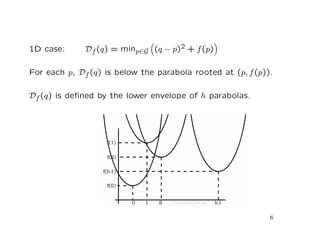
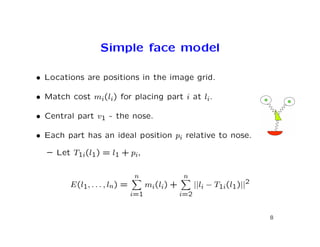
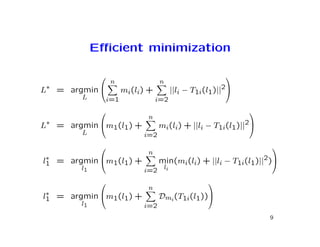
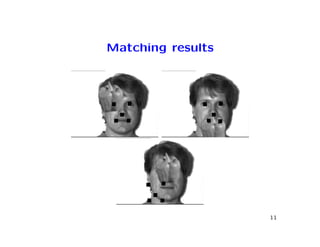
This document describes an efficient framework for part-based object recognition using pictorial structures. The framework represents objects as graphs of parts with spatial relationships. It finds the optimal configuration of parts through global minimization using distance transforms, allowing fast computation despite modeling complex spatial relationships between parts. This enables soft detection to handle partial occlusion without early decisions about part locations.








































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)













