Downloaded 45 times
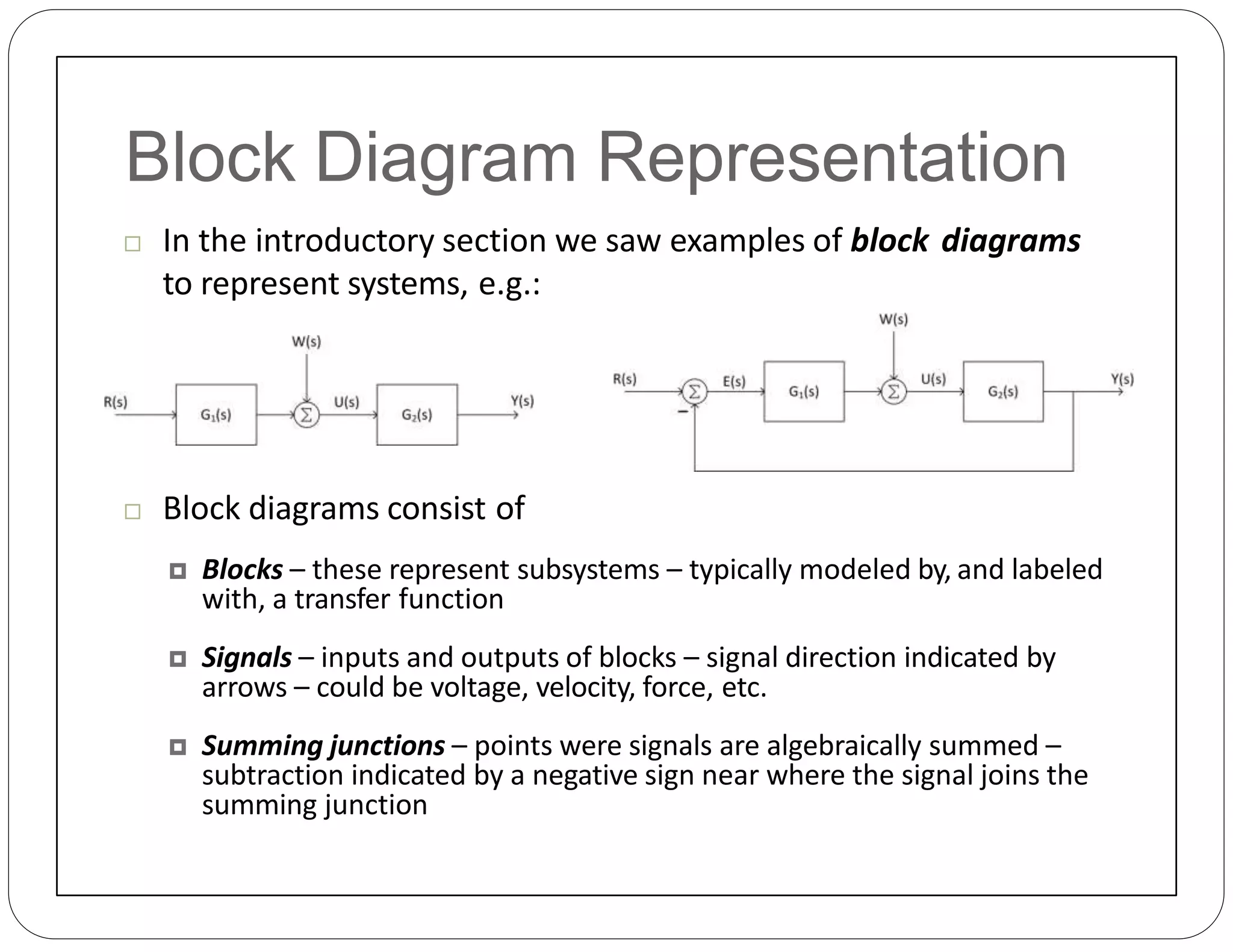
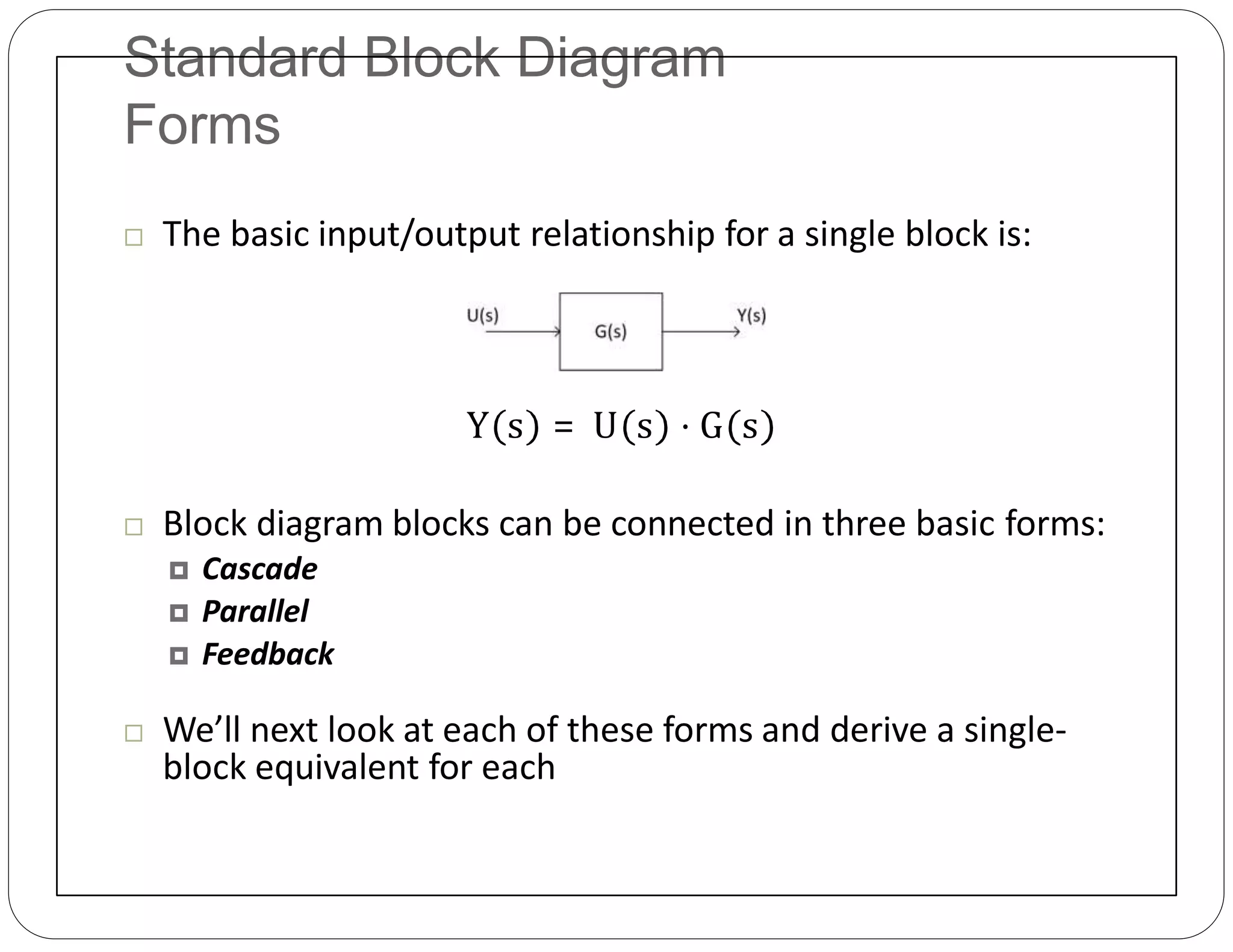
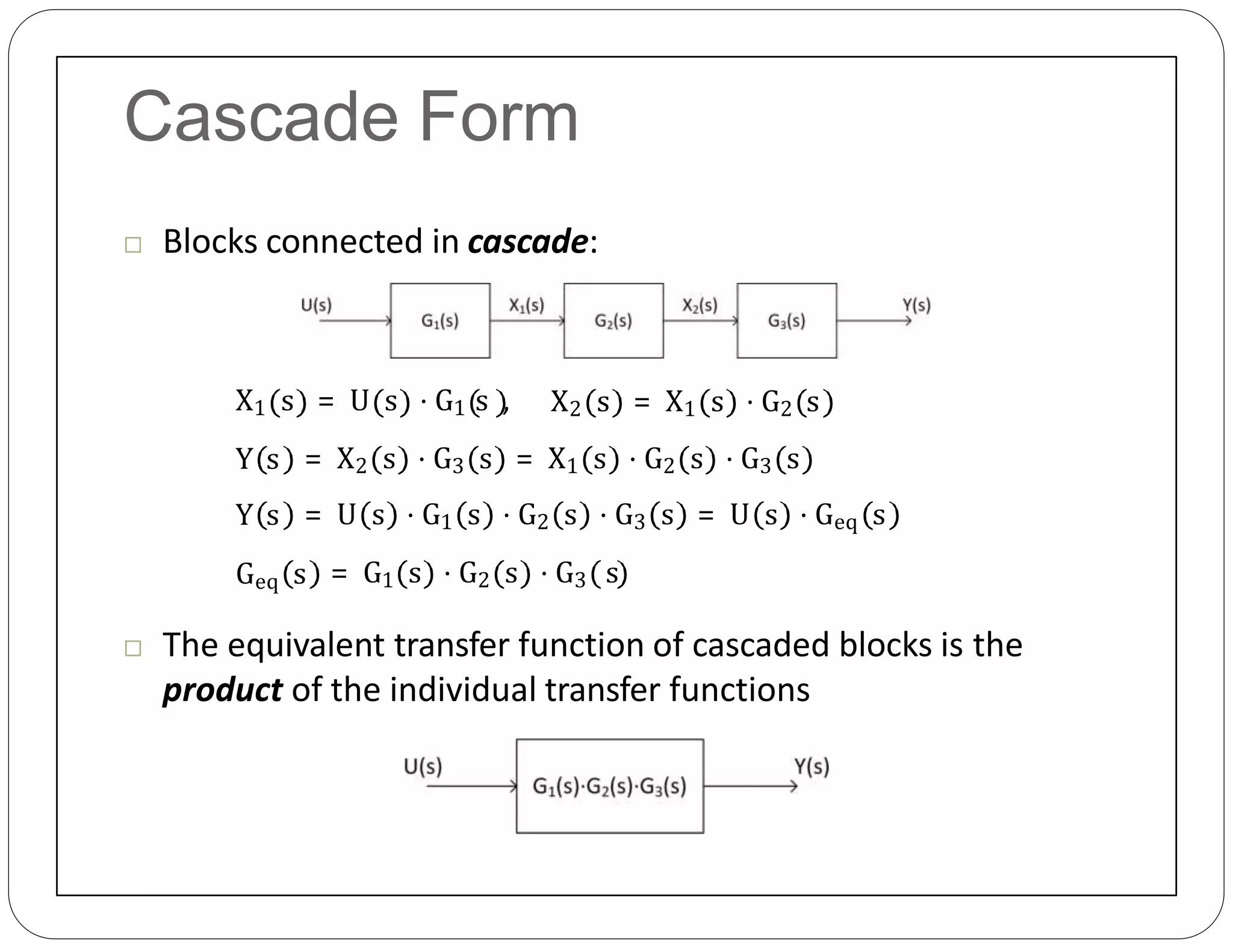
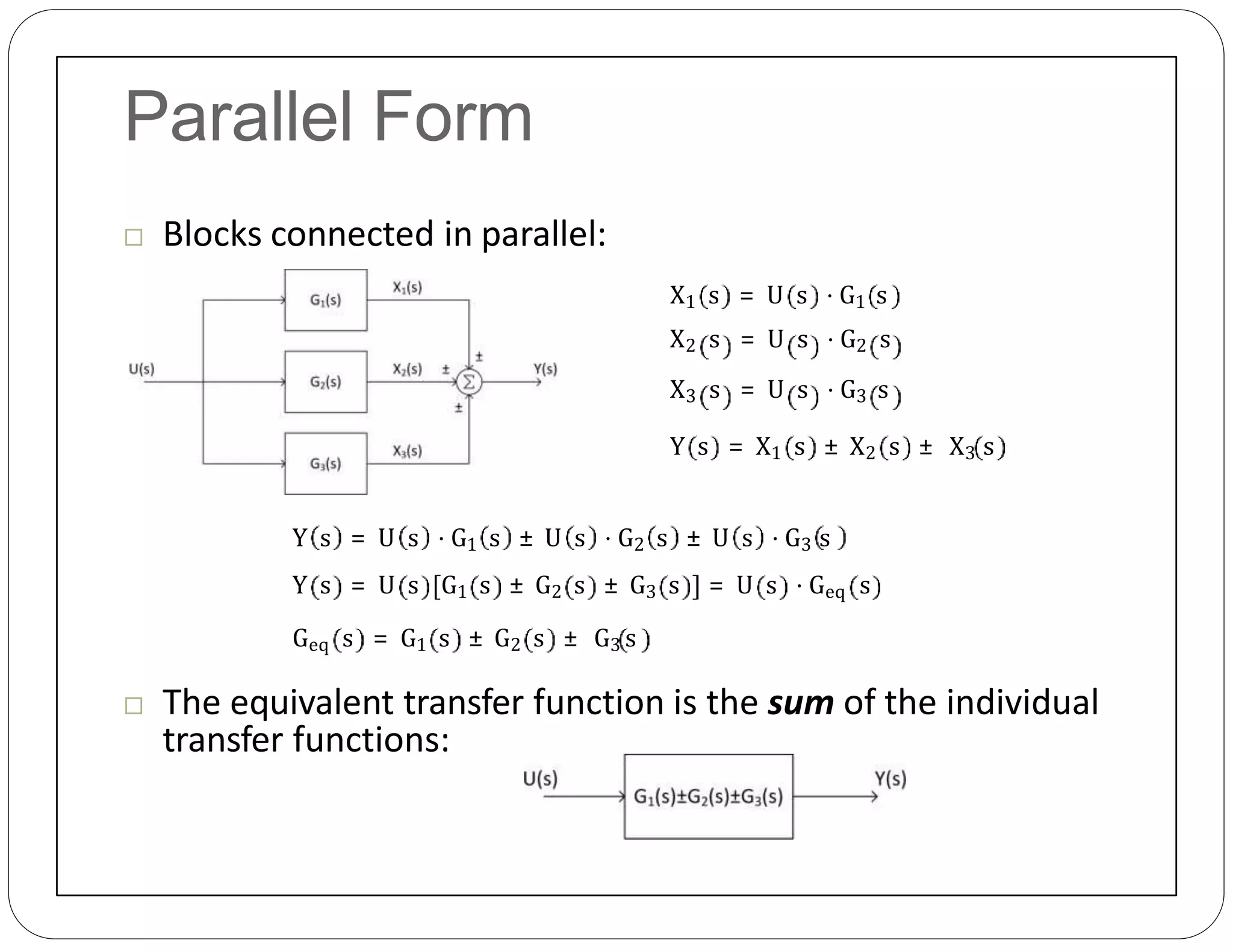
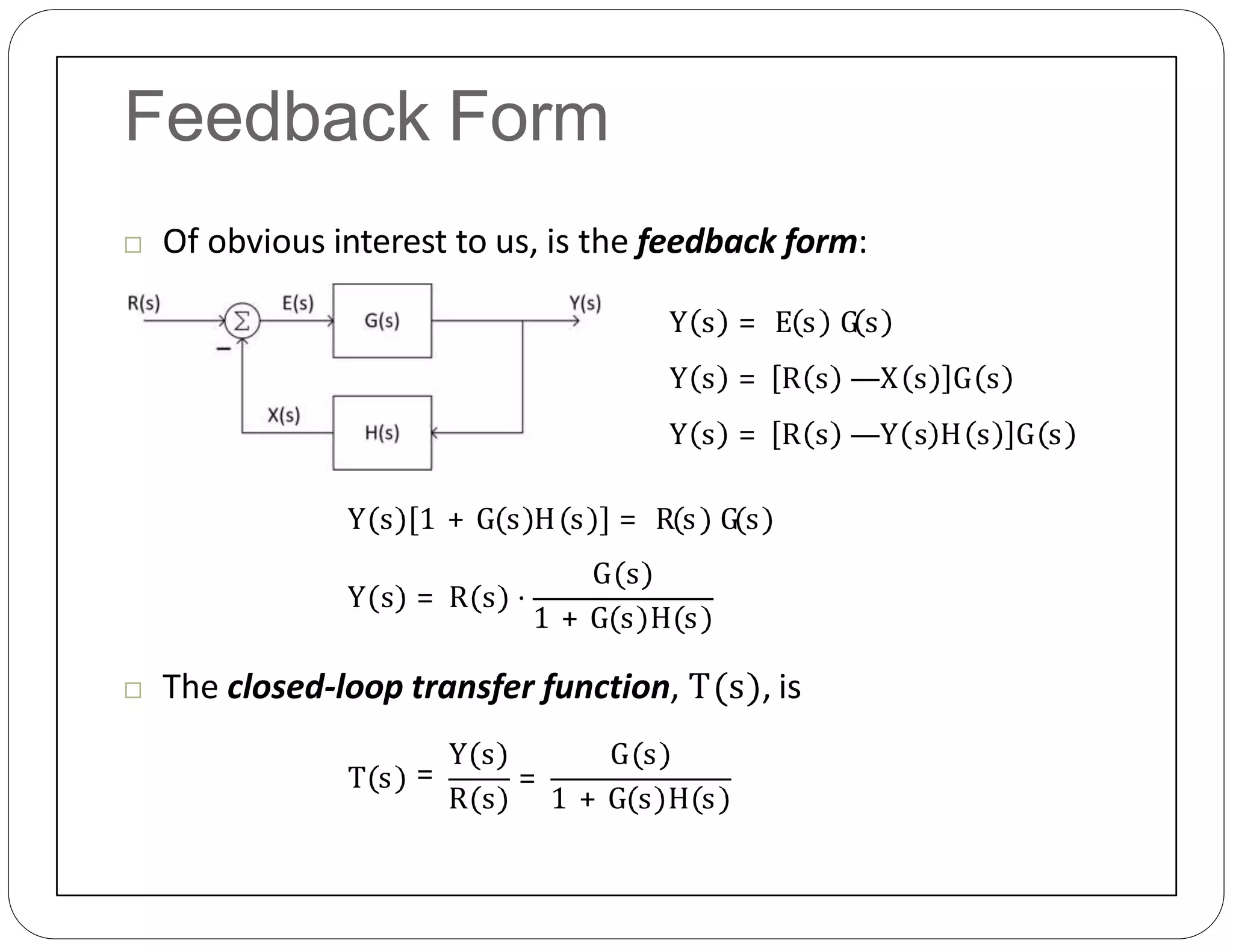
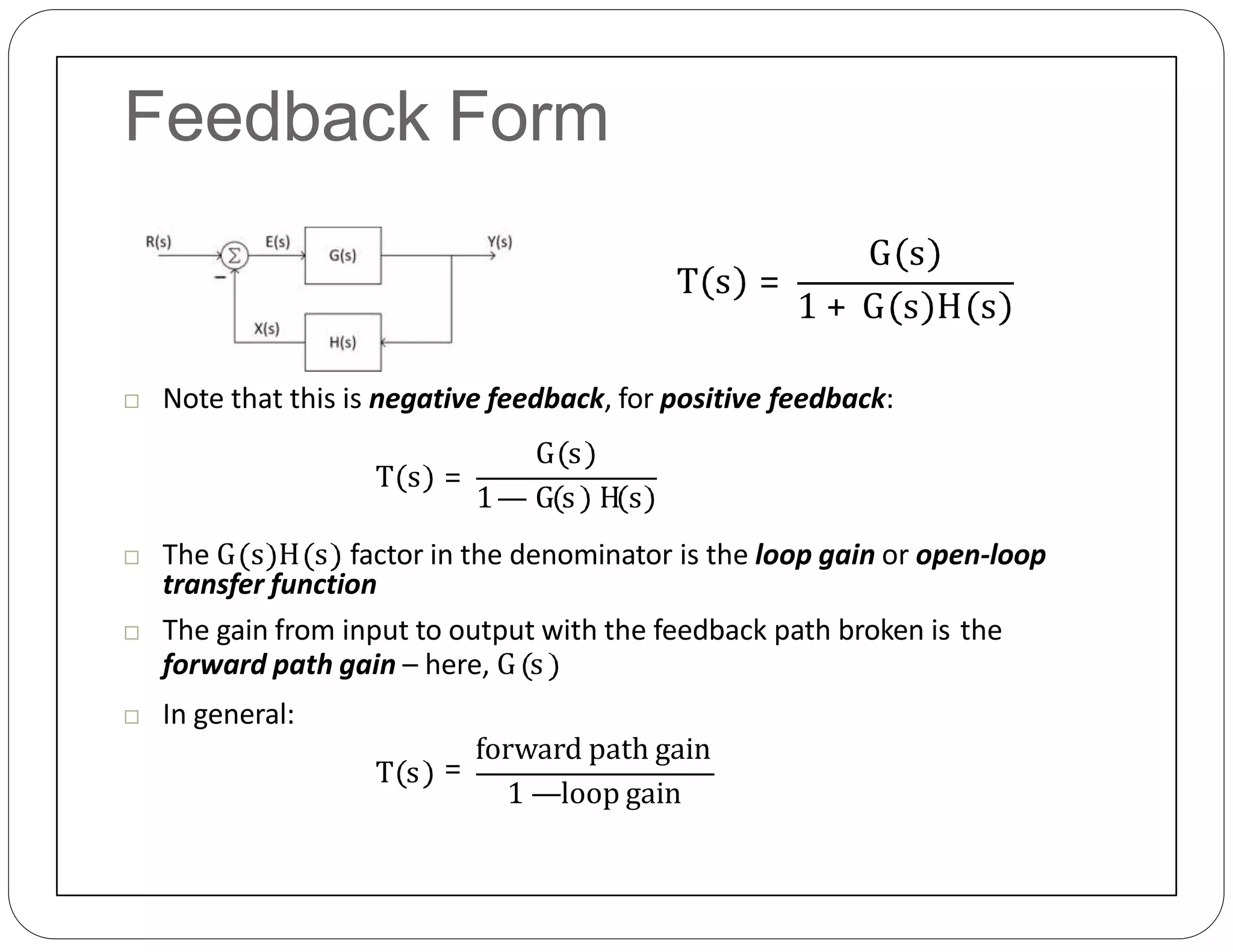
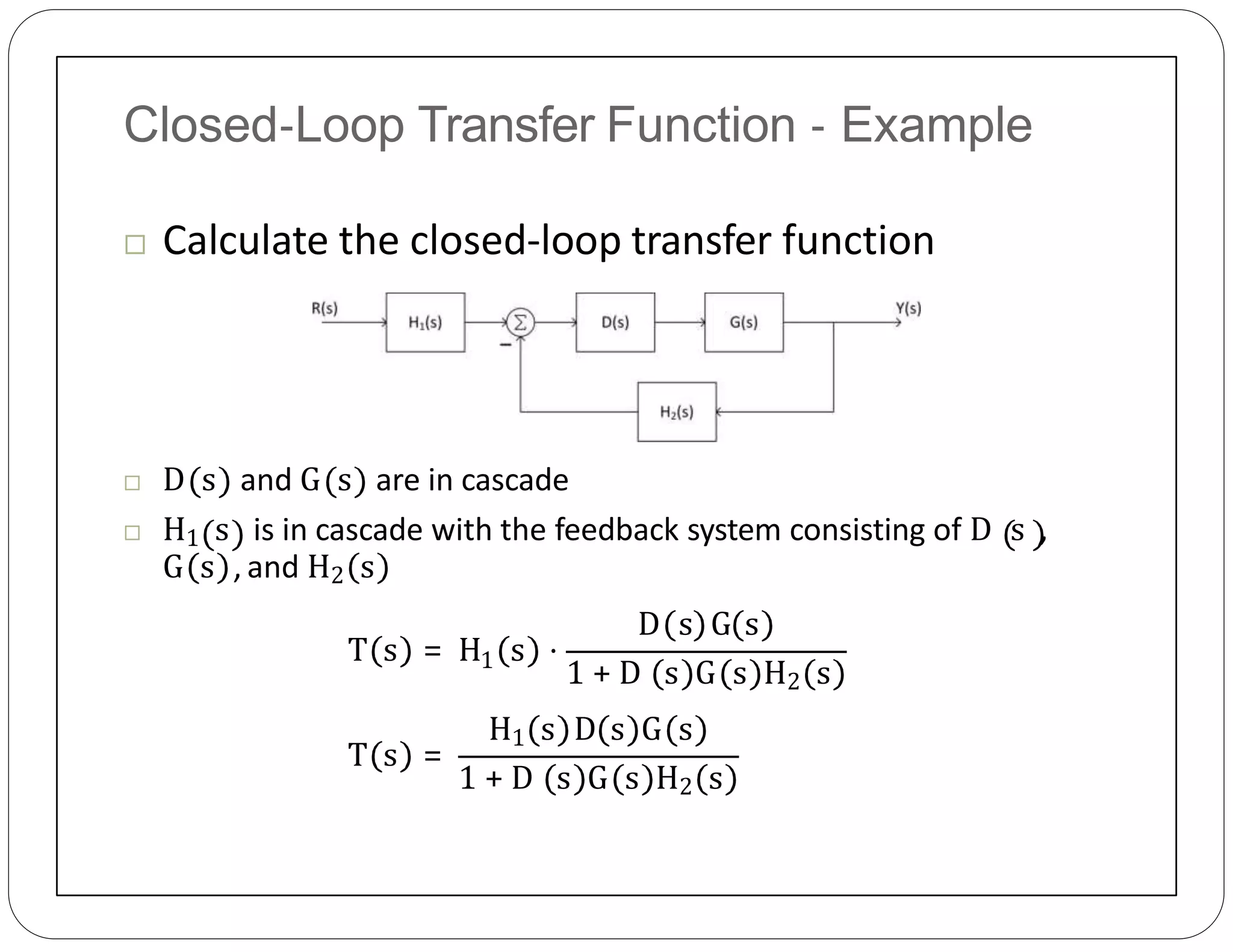
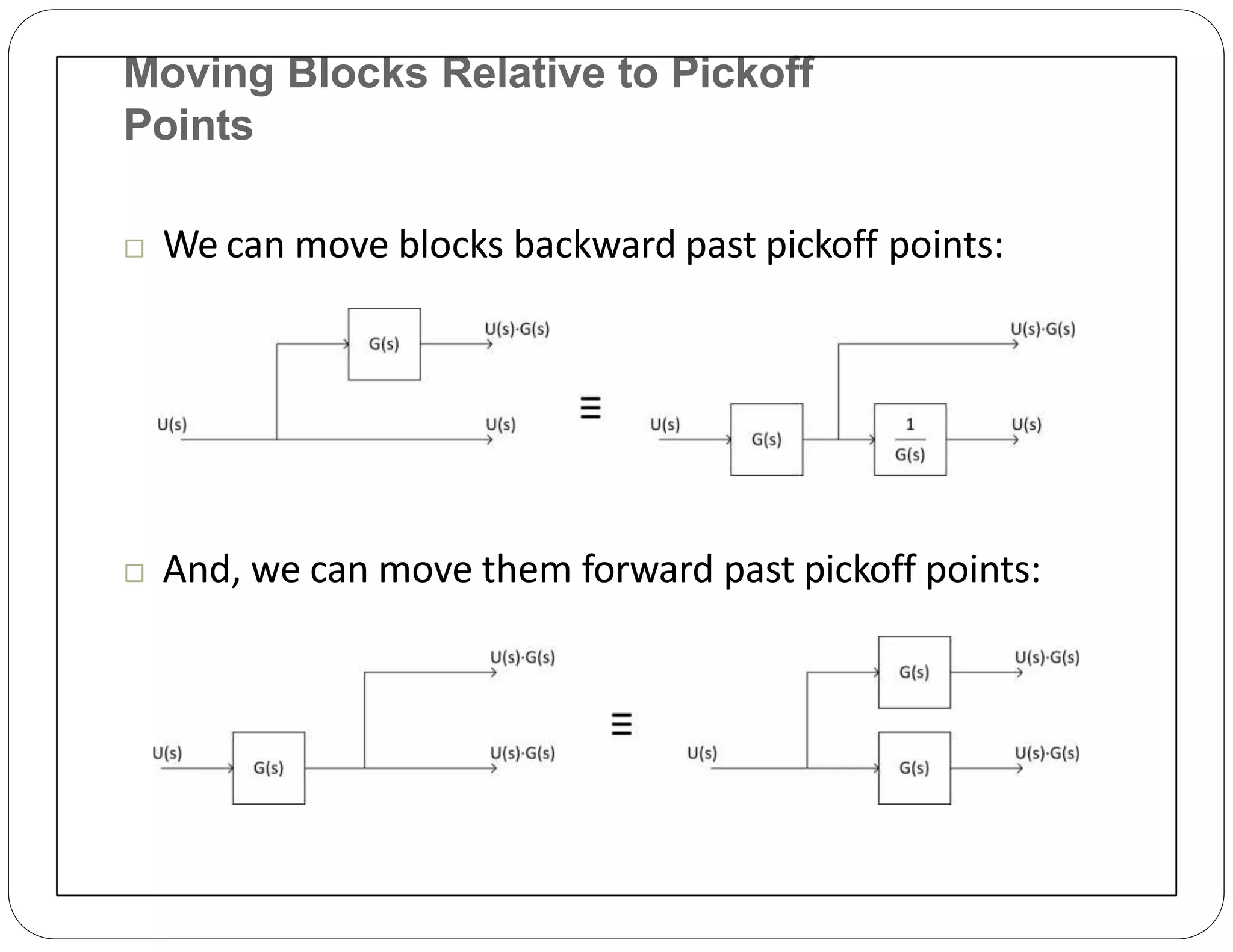
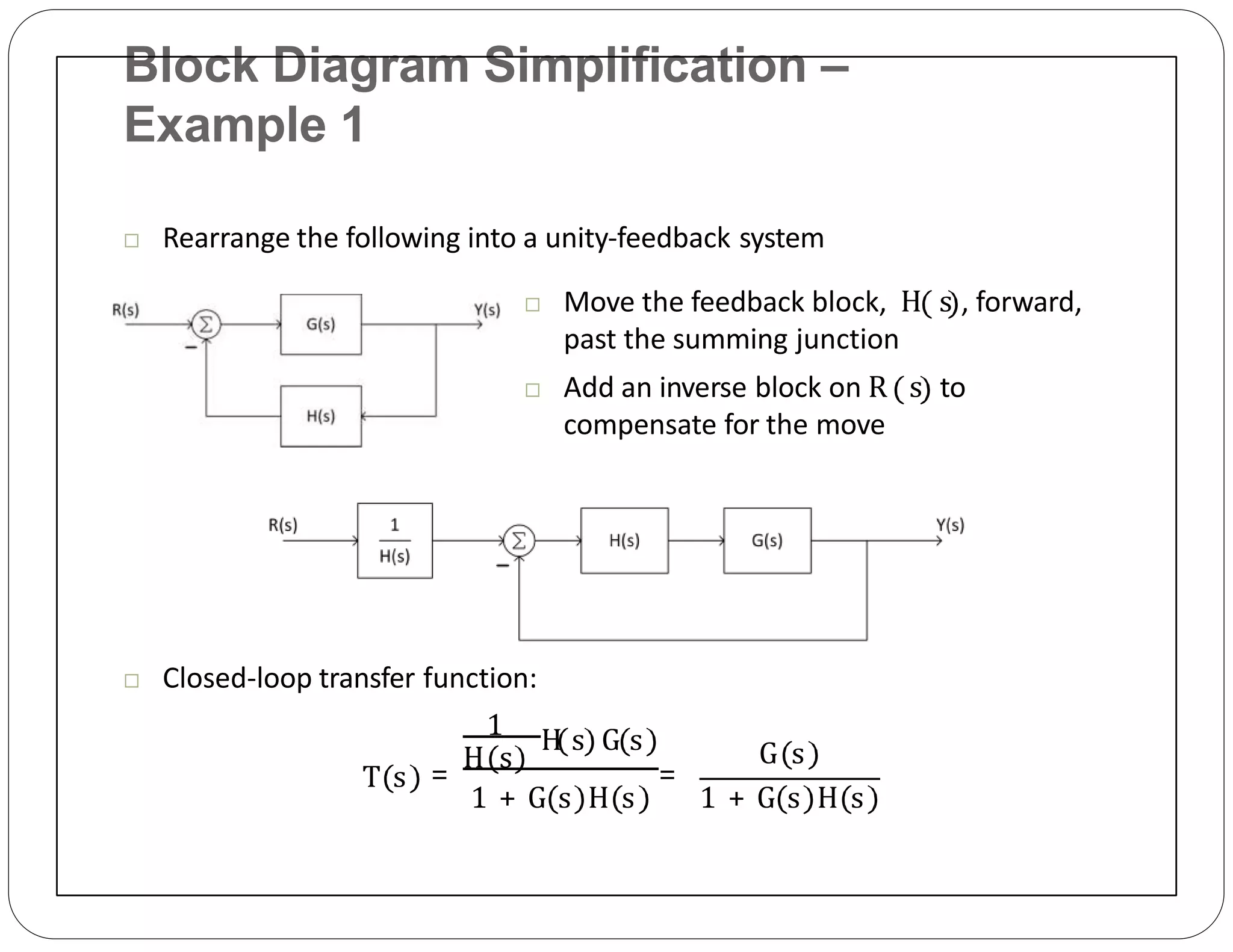
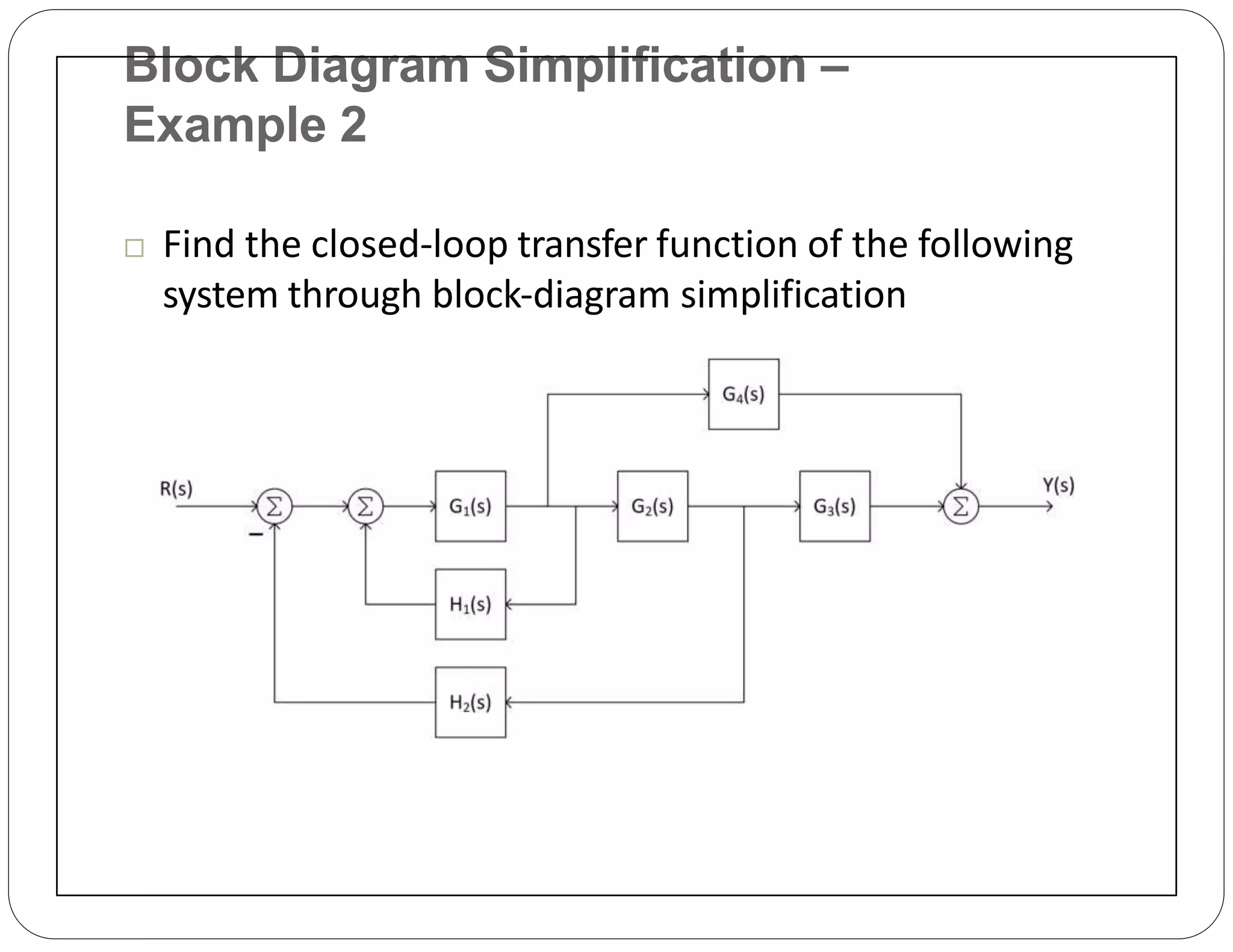
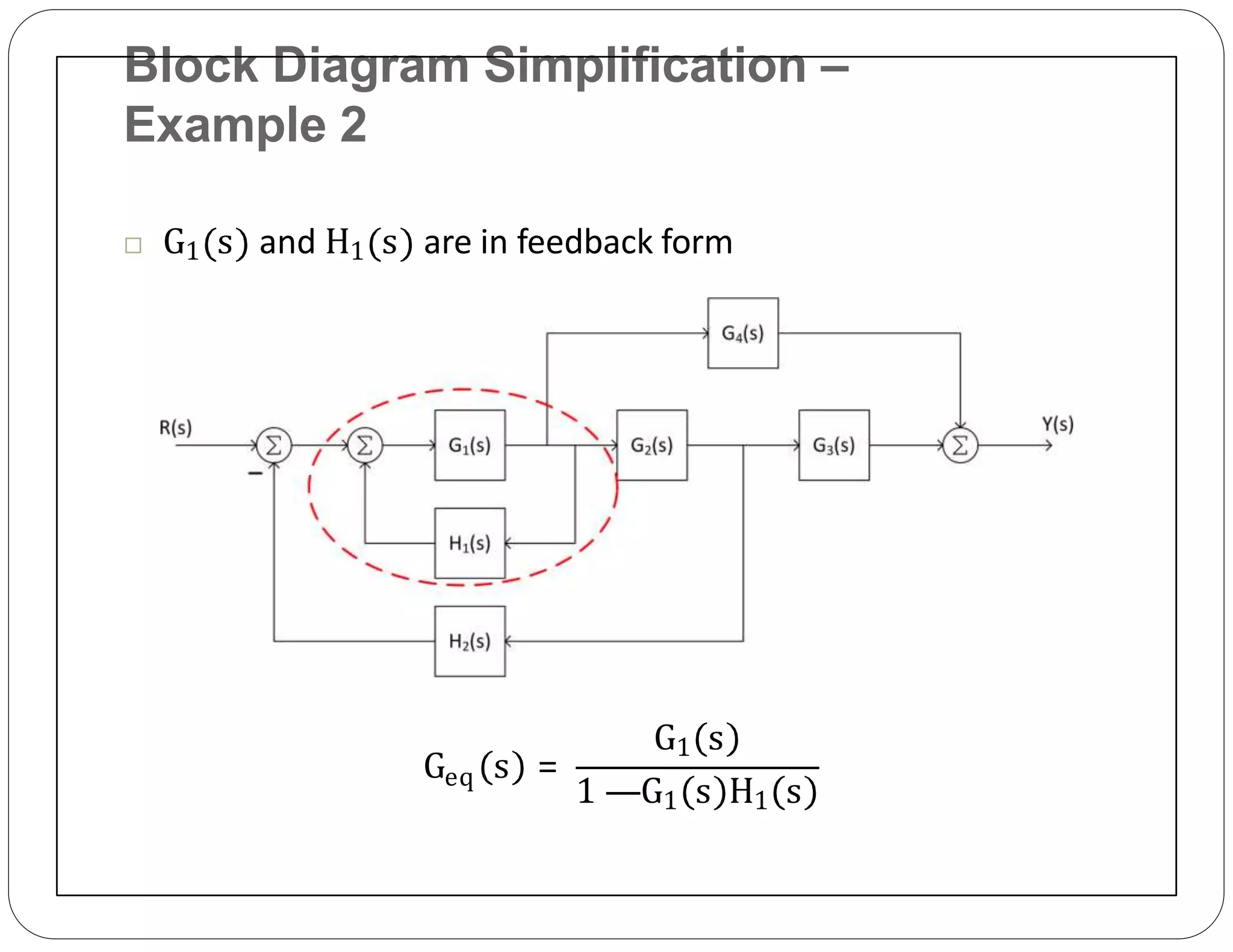
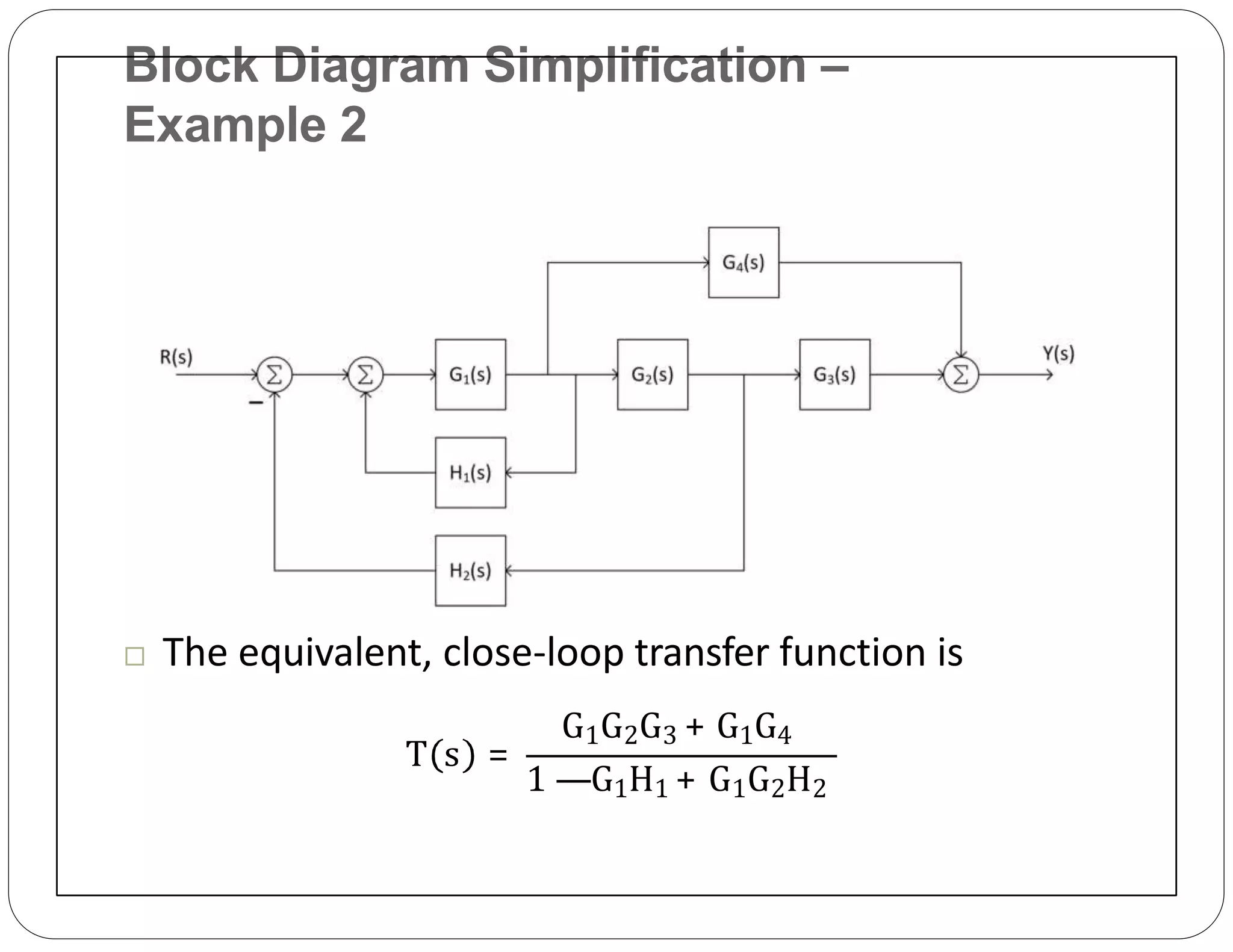
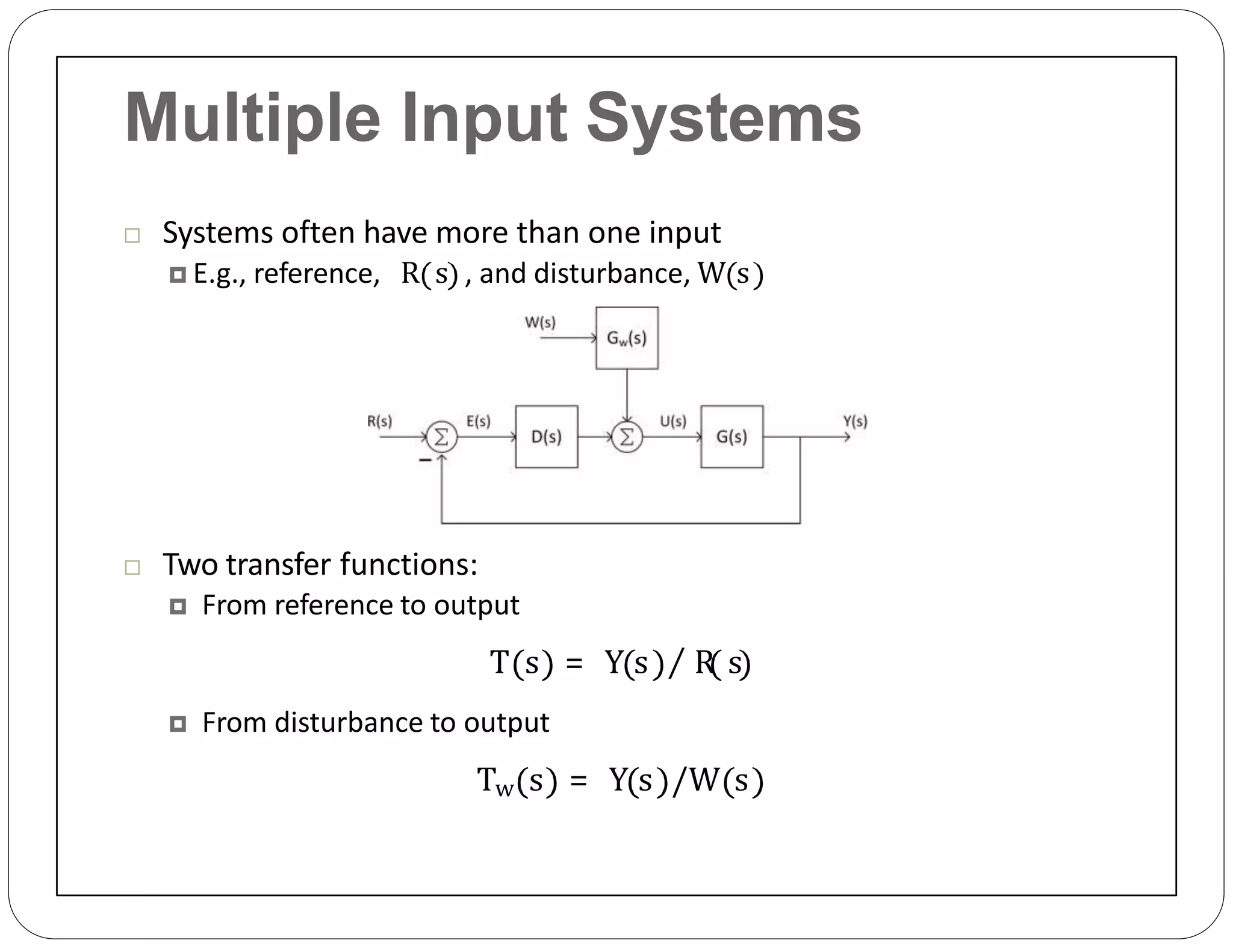
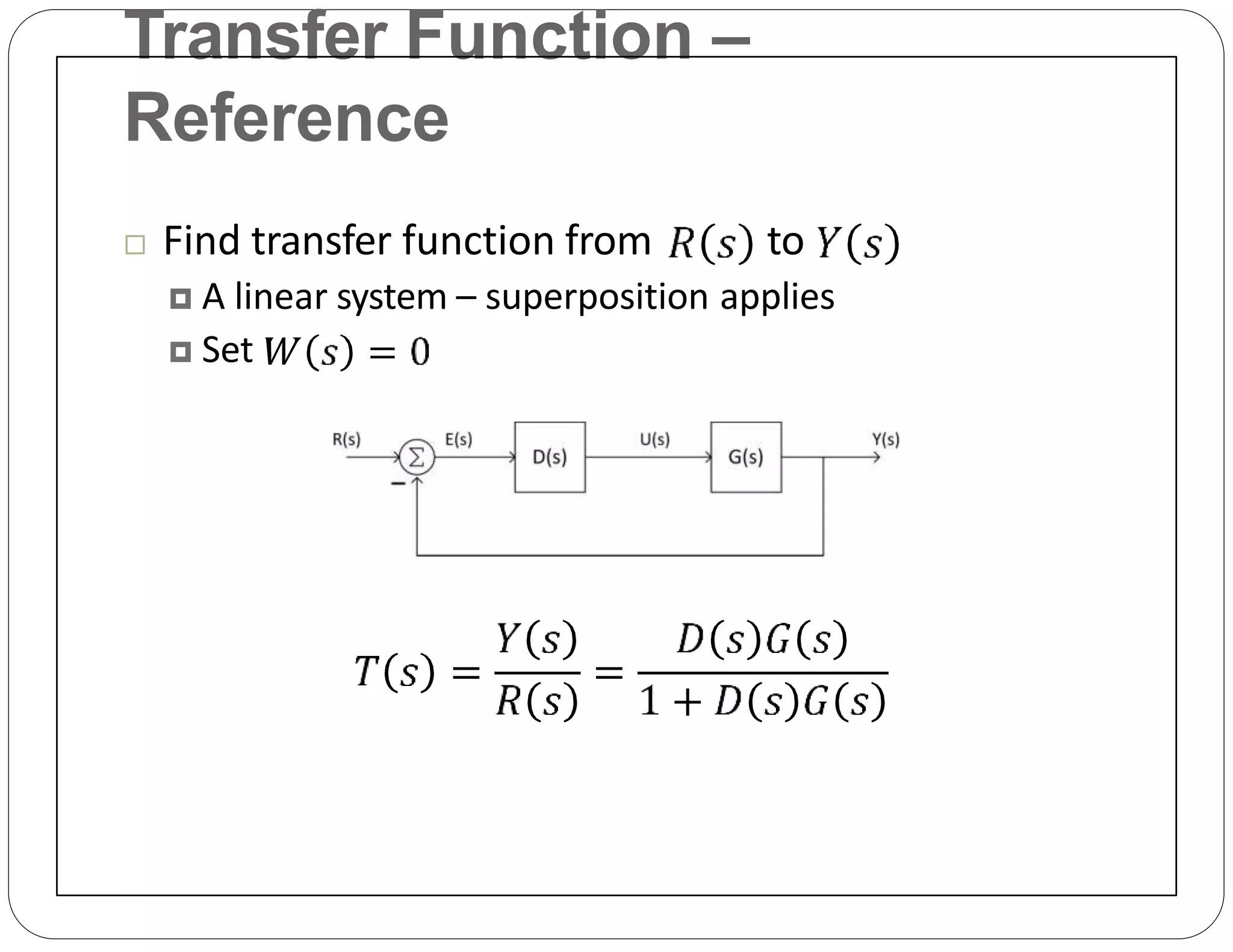
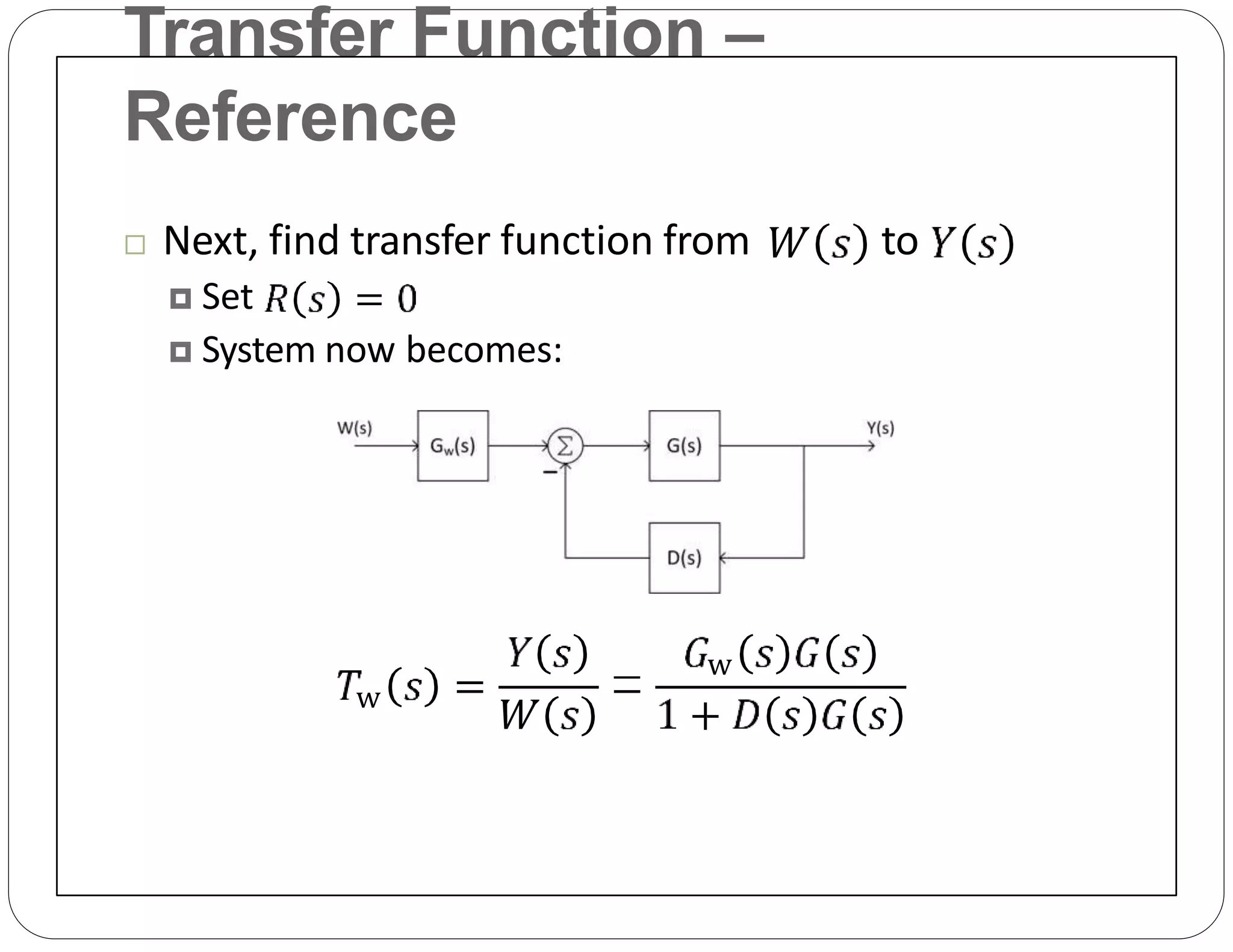
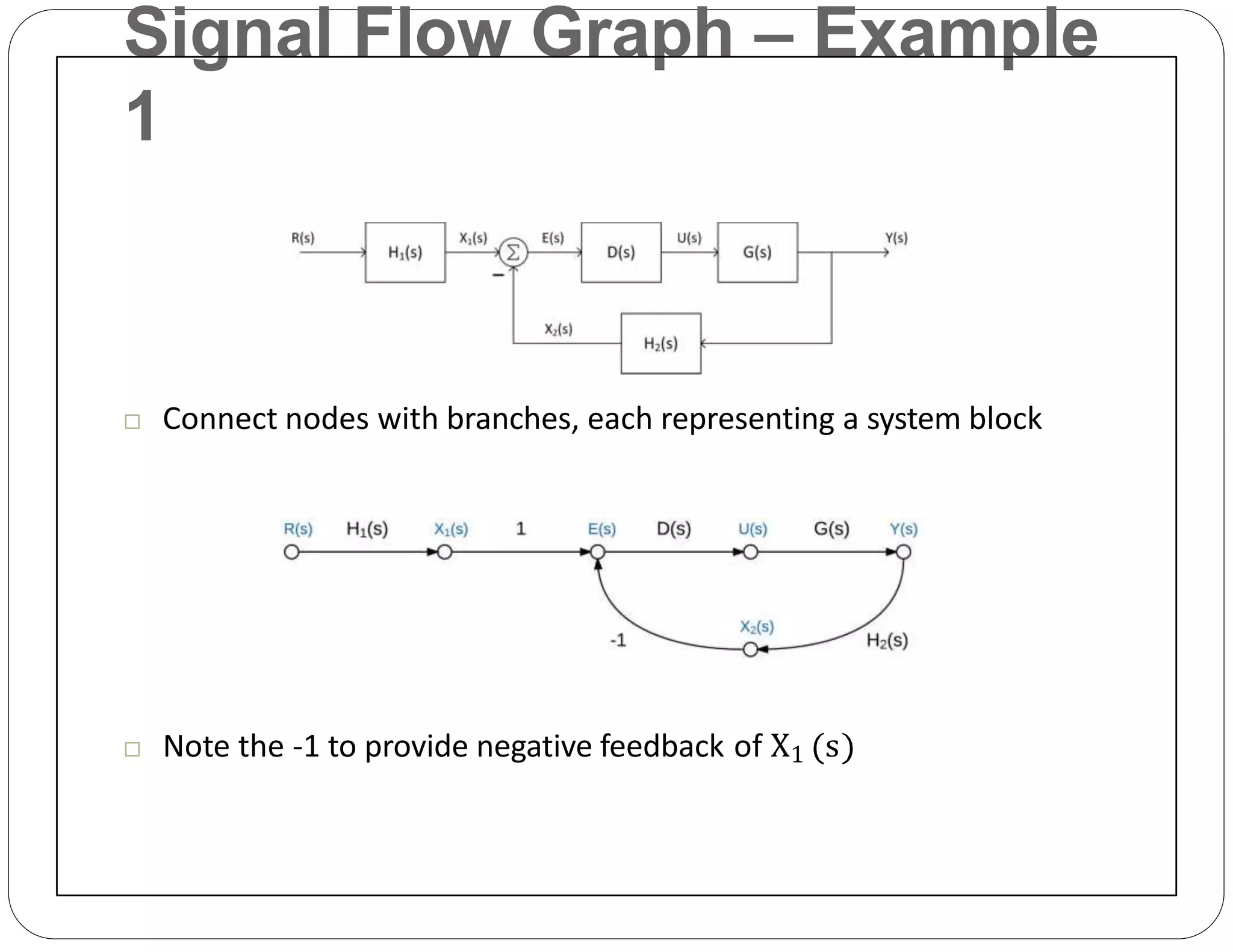
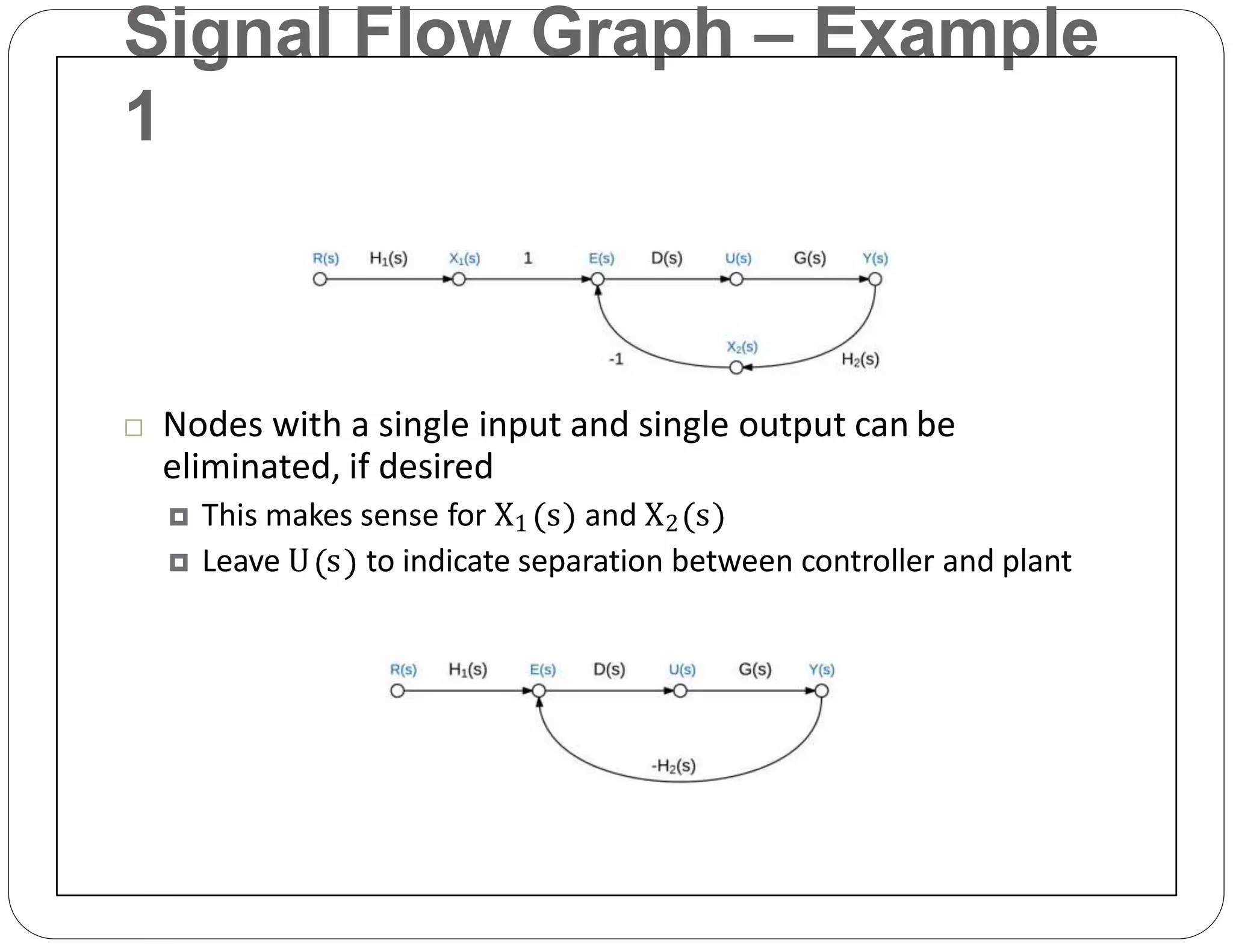
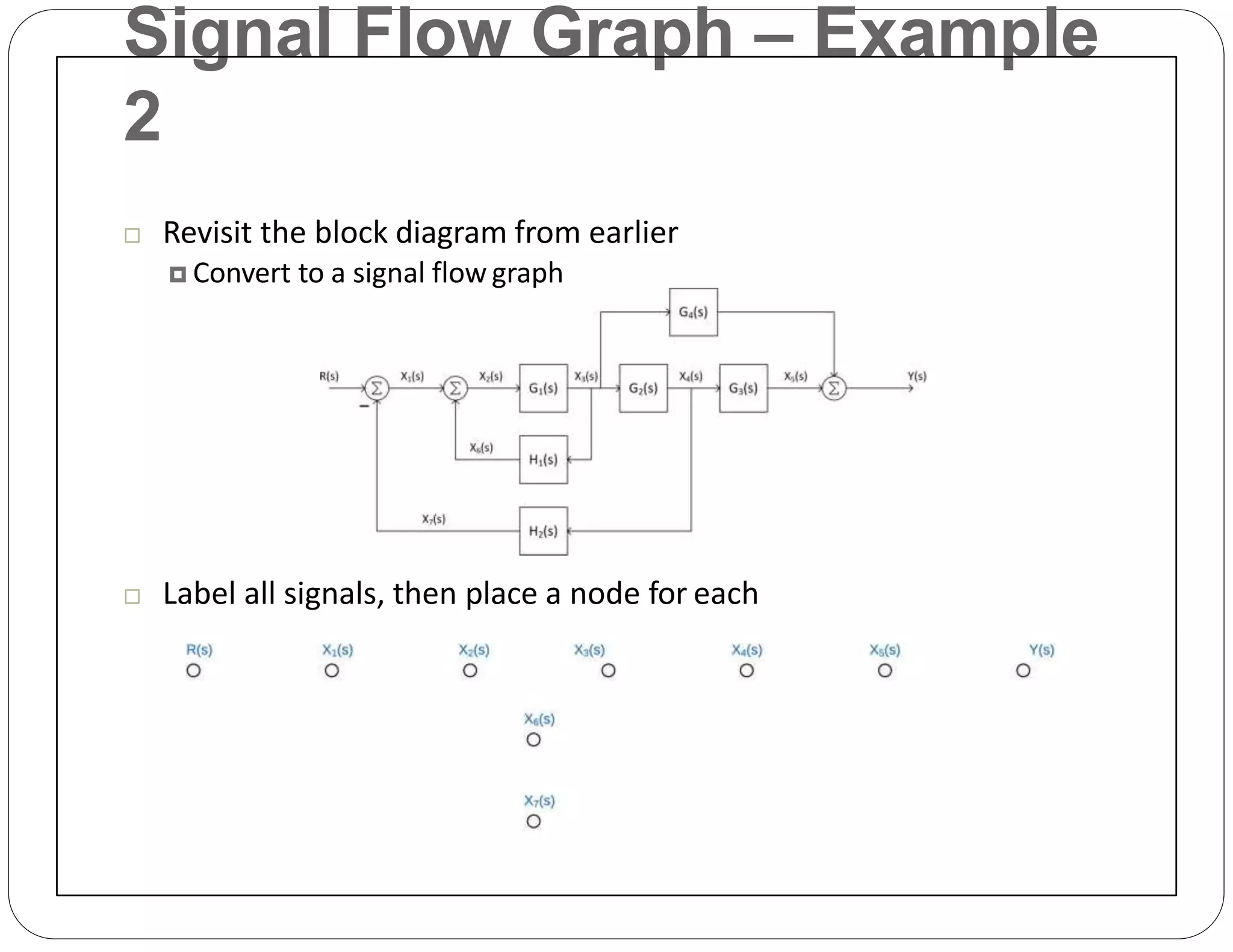
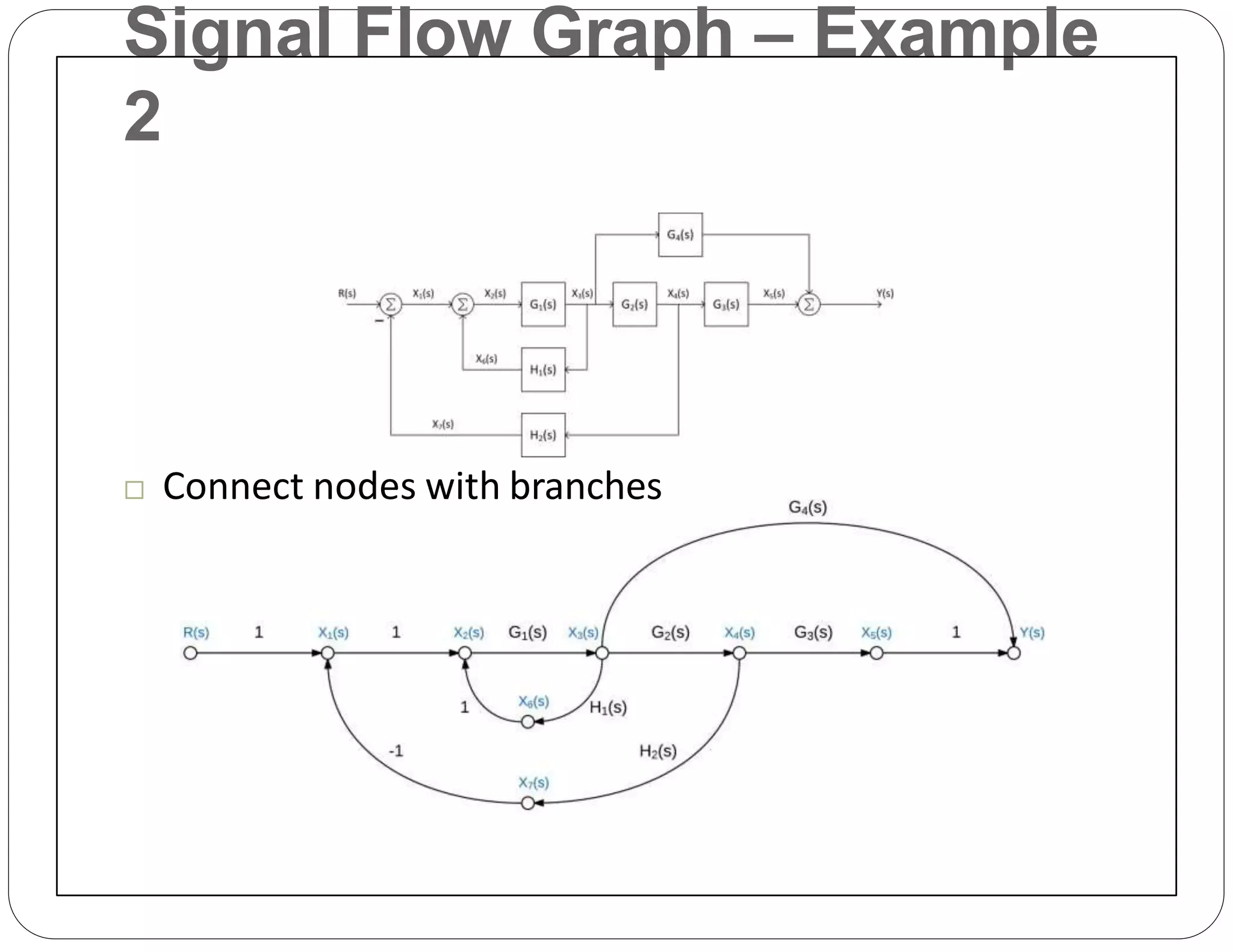
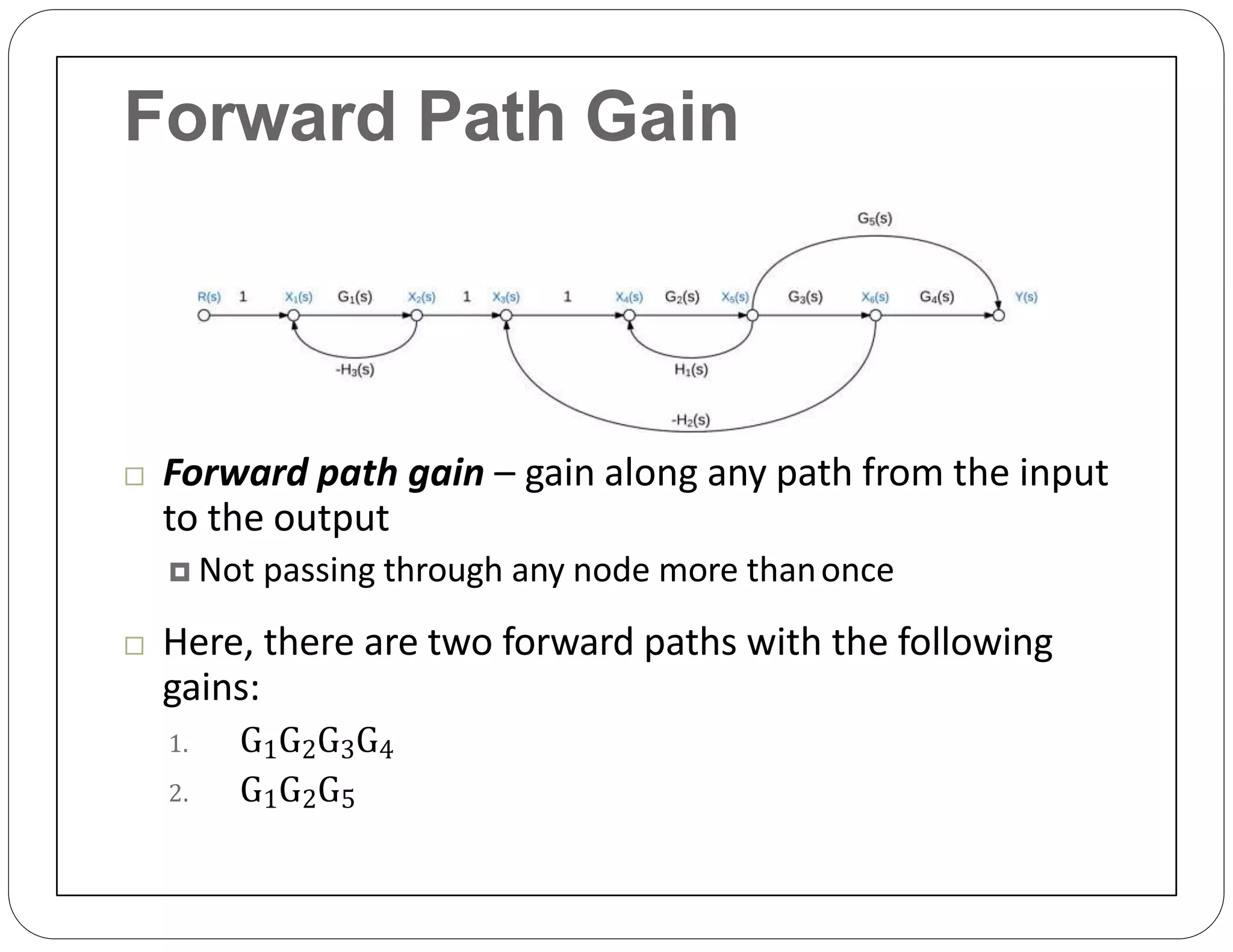
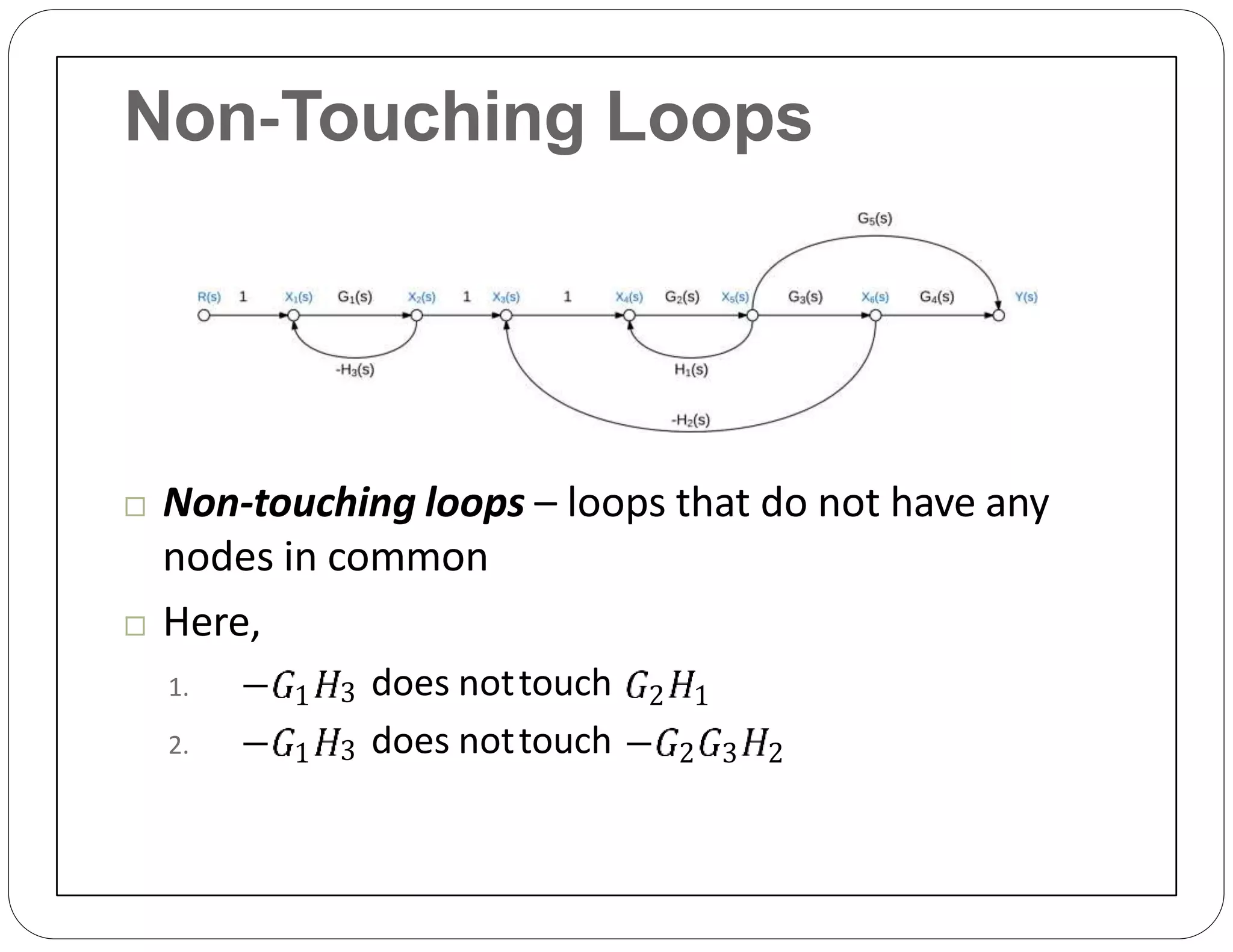
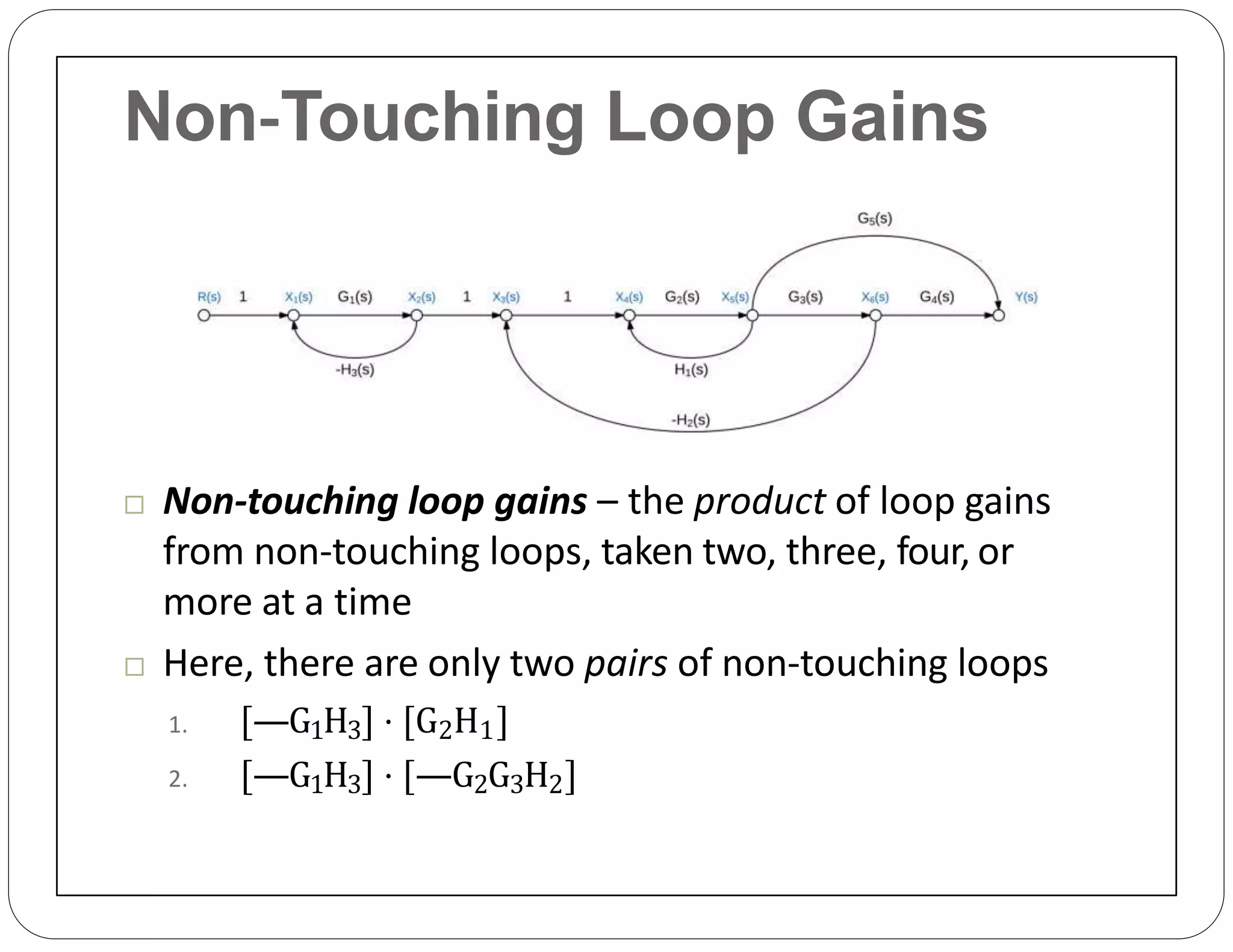
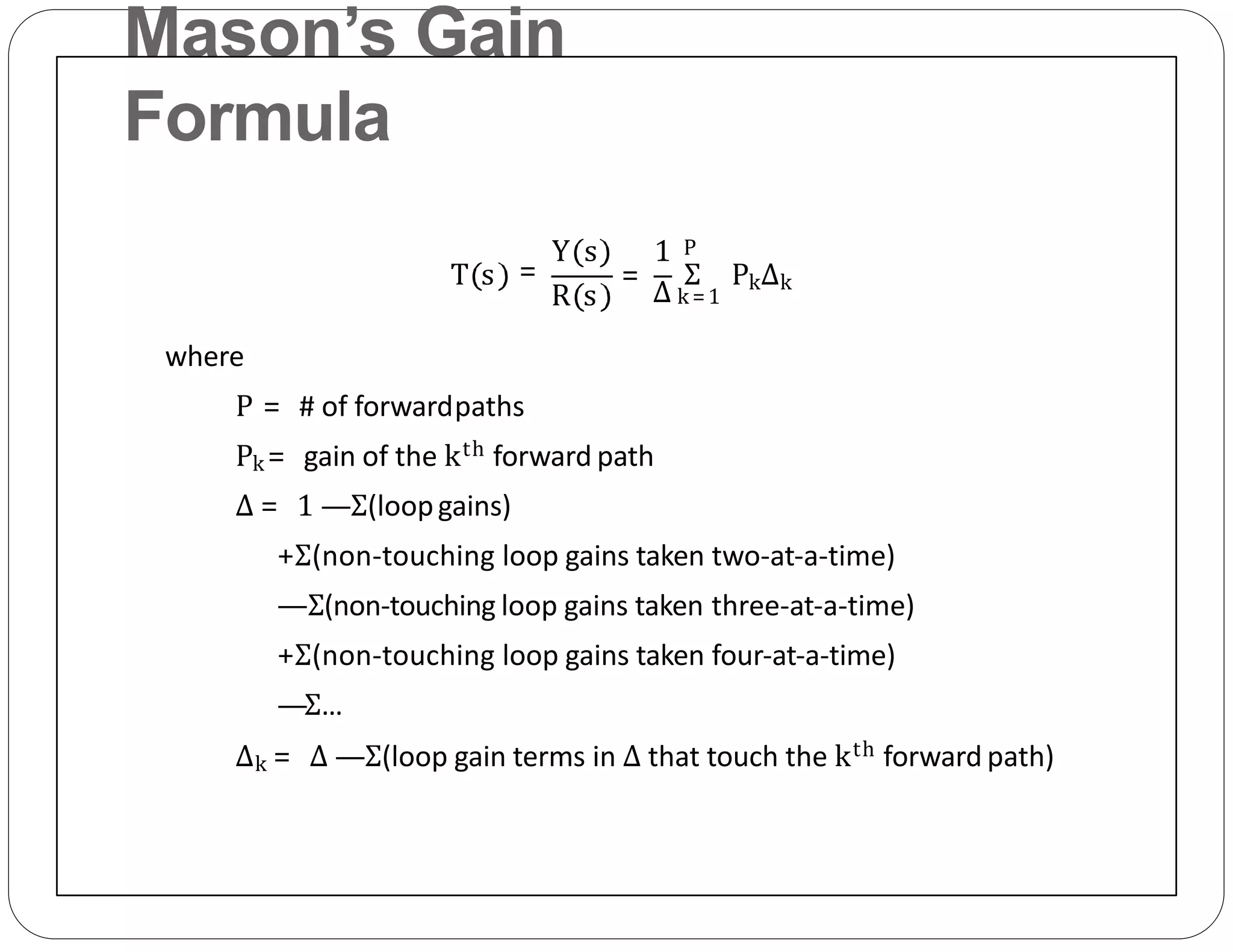
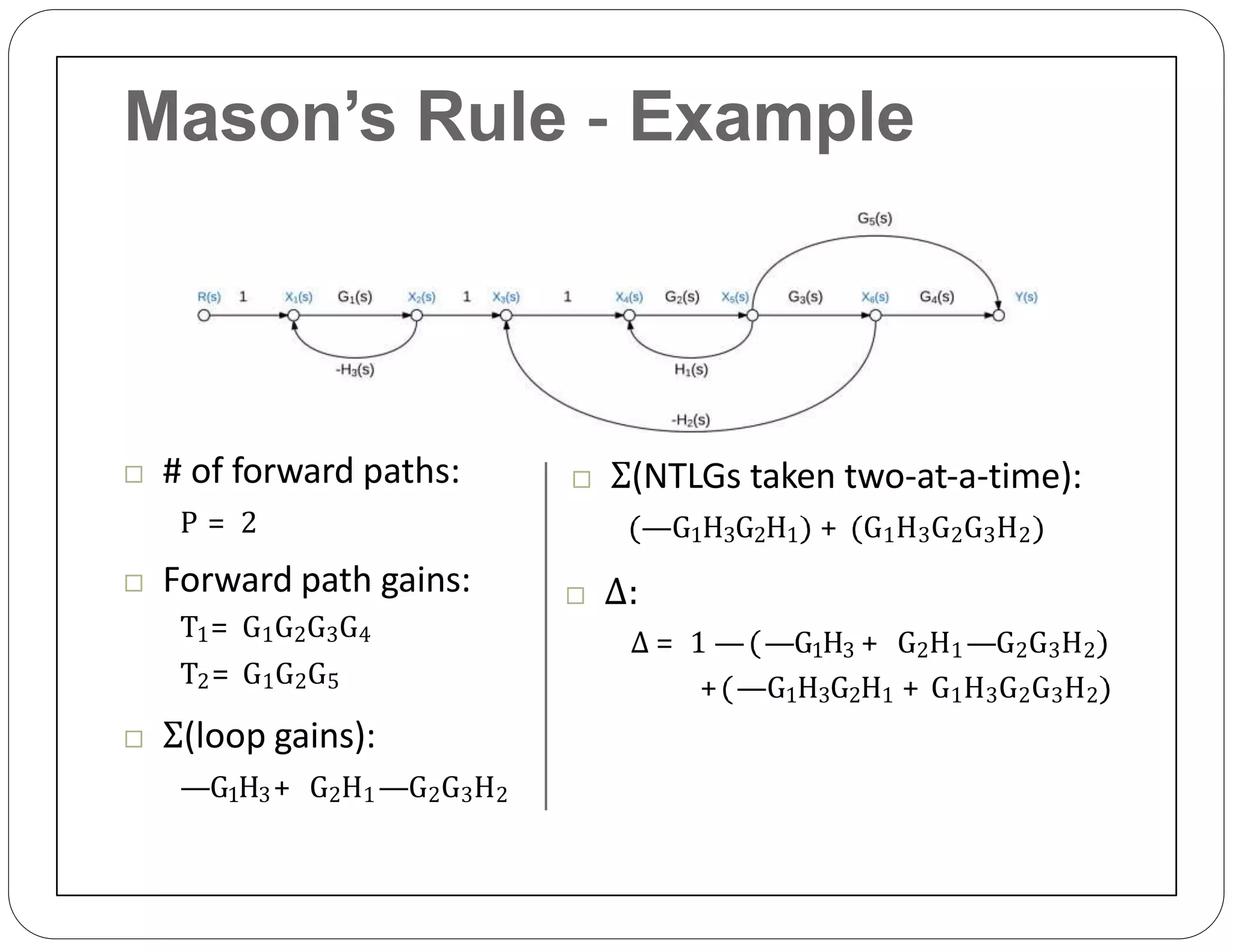
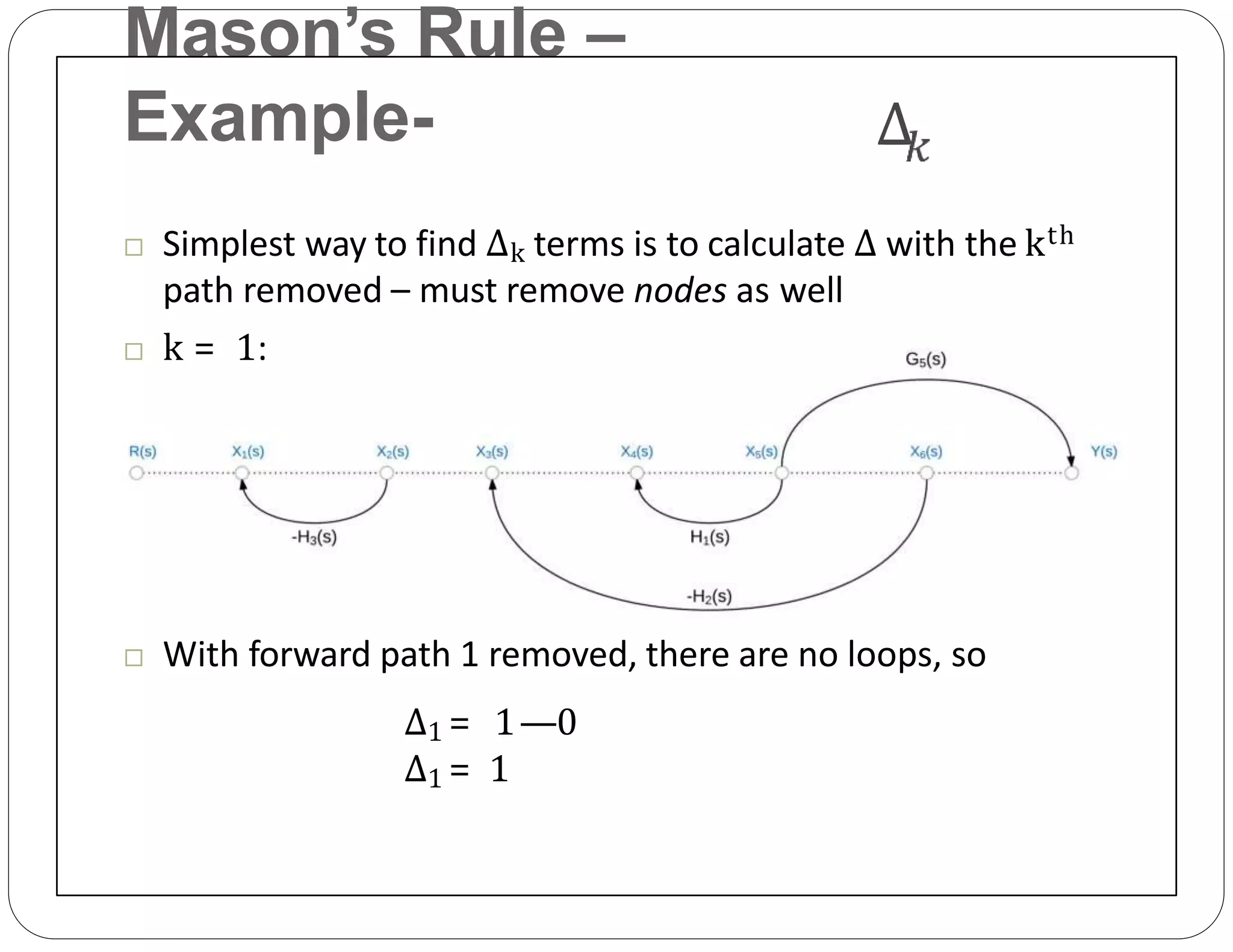
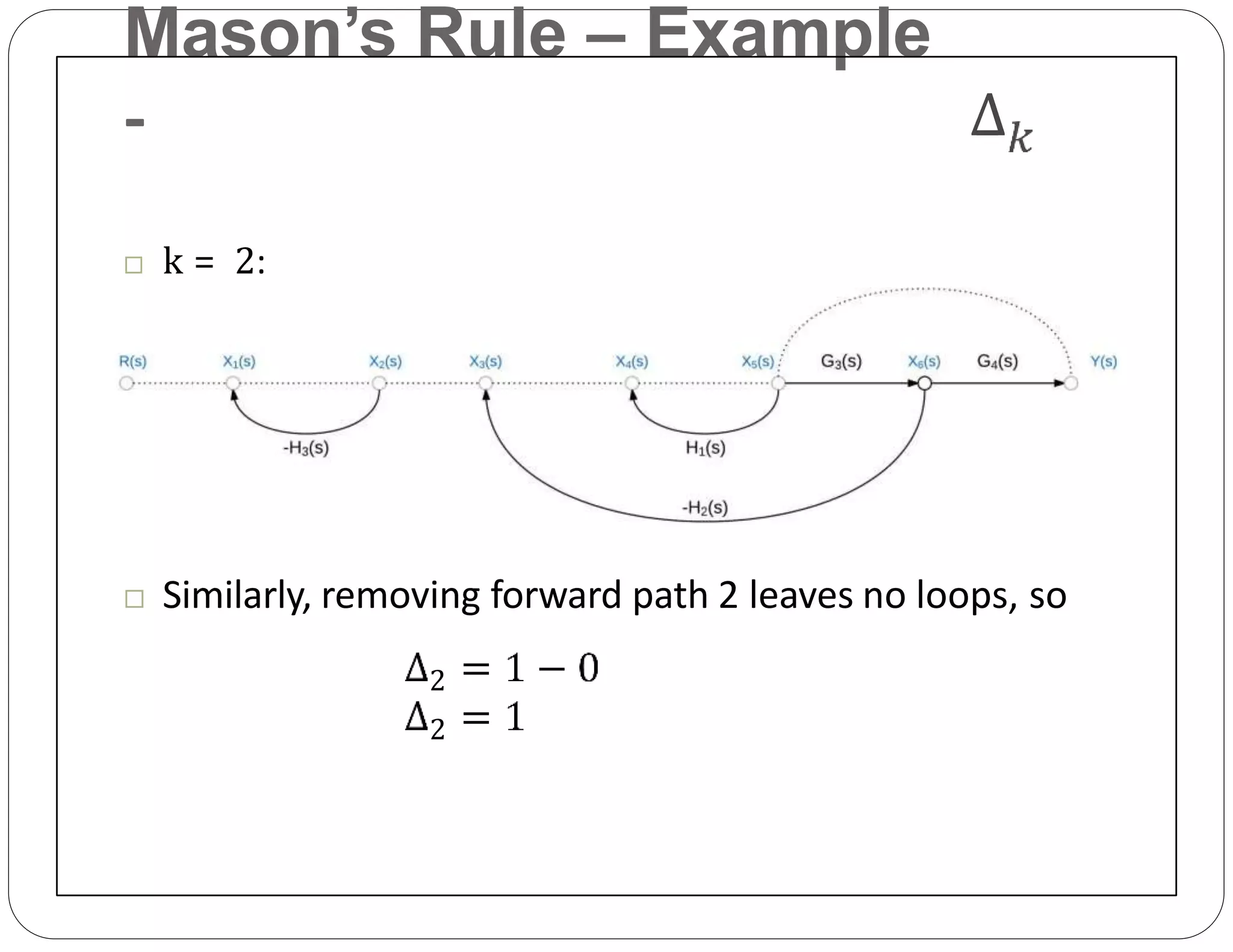
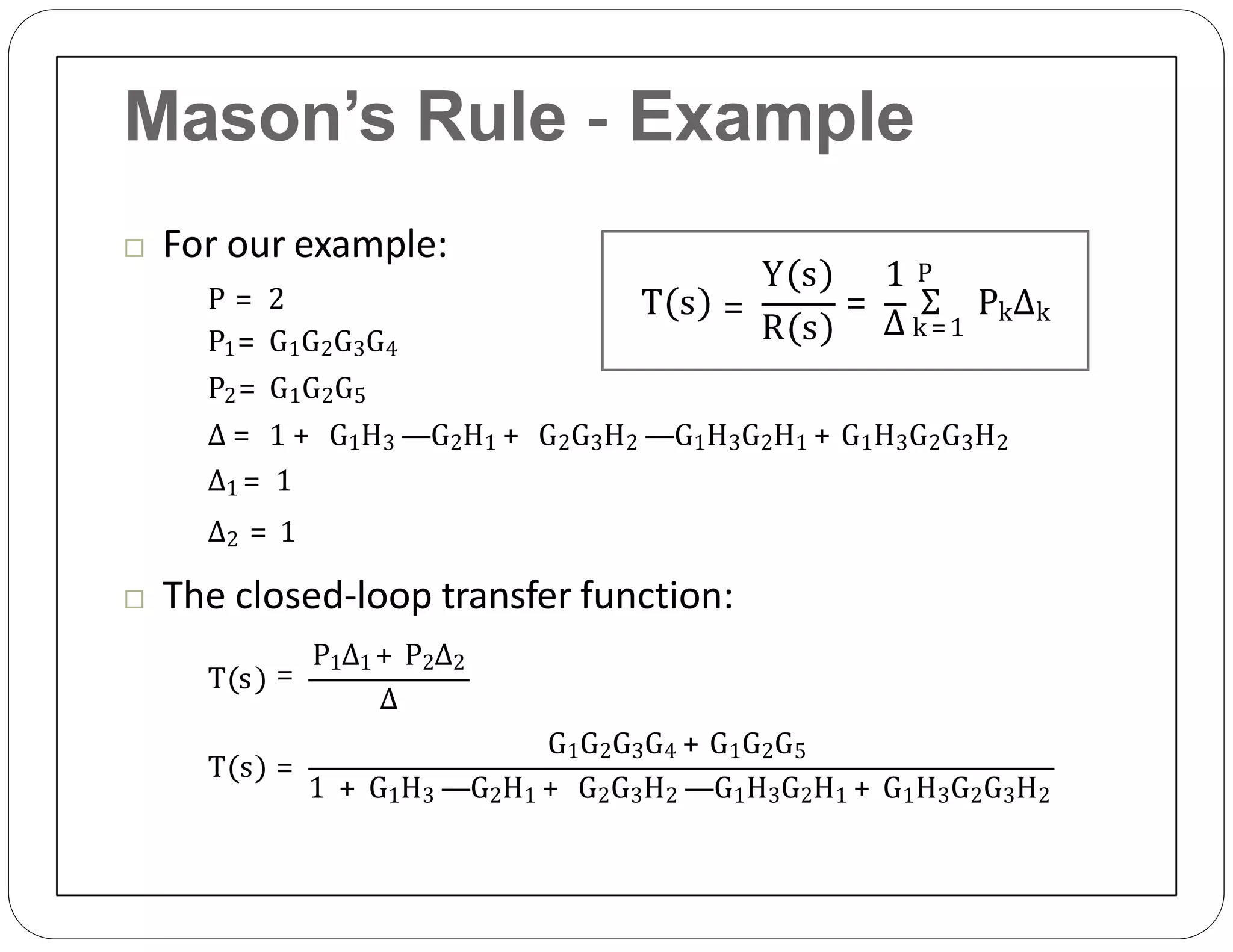

The document provides an overview of block diagrams and signal flow graphs, explaining their components such as blocks, signals, and summing junctions. It discusses the input/output relationships for cascaded, parallel, and feedback configurations, highlighting the importance of transfer functions in these systems. The document also introduces Mason's rule for calculating transfer functions and concludes with examples of block diagram simplification and the conversion to signal flow graphs.







![Reduction of multiple subsystem [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/reductionofmultiplesubsystemcompatibilitymode-110418075355-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)



























































![Seller Deck - Presentation [Concert L2].PPTX](https://cdn.slidesharecdn.com/ss_thumbnails/sellerdeck-presentationconcertl2-251219171156-24982daf-thumbnail.jpg?width=640&height=640&fit=bounds)


















