Download to read offline












![∆i = Calculate ∆ for ith path
=1- [loop transmittance of single Non Touching loops with forward path]
+ [loop transmittance of pair of Non Touching loops withforward path]
n
Pii
i1
R(s)
∆ = 1- (sum of all individual loop transmittance) + (sum of the products
of loop transmittance of all possible pairs of Non Touching loops) – (sum
of the products of loop transmittance of Triple of Non Touching loop) +
…
T C(s)](https://image.slidesharecdn.com/4-210202121104/75/Signal-Flow-Graph-SFG-and-Mason-Gain-Formula-Example-solved-with-Masson-Gain-Formula-15-2048.jpg)




The document provides an overview of signal flow graphs (SFG), detailing terminologies, basic properties, and relationships between SFGs and block diagrams. It explains key concepts like paths, loops, gains, and Mason's gain formula, along with their applications in linear systems represented by algebraic equations. Additionally, it includes examples to illustrate the application of the Mason gain formula for calculating transfer functions within these systems.
Introduces SFG terminology, basic properties, relationships with block diagrams, and Mason Gain Formula.
Demonstrates how to draw the SFG of a simple equation y=ax, explains nodes and branches.
Defines input and output nodes, forward paths, and feedback loops within SFG.
Explains self-loops, branch gains, path gains, and non-touching concepts in SFG.
Draws SFG for linear algebraic equations highlighting relationships between variables.
Discusses the application of SFG to linear systems and the cause-and-effect arrangement of nodes.
Explains various components such as input/output nodes, paths, and gains in detail.
Clarifies how the value of a variable at a node is determined by signals entering and exiting.
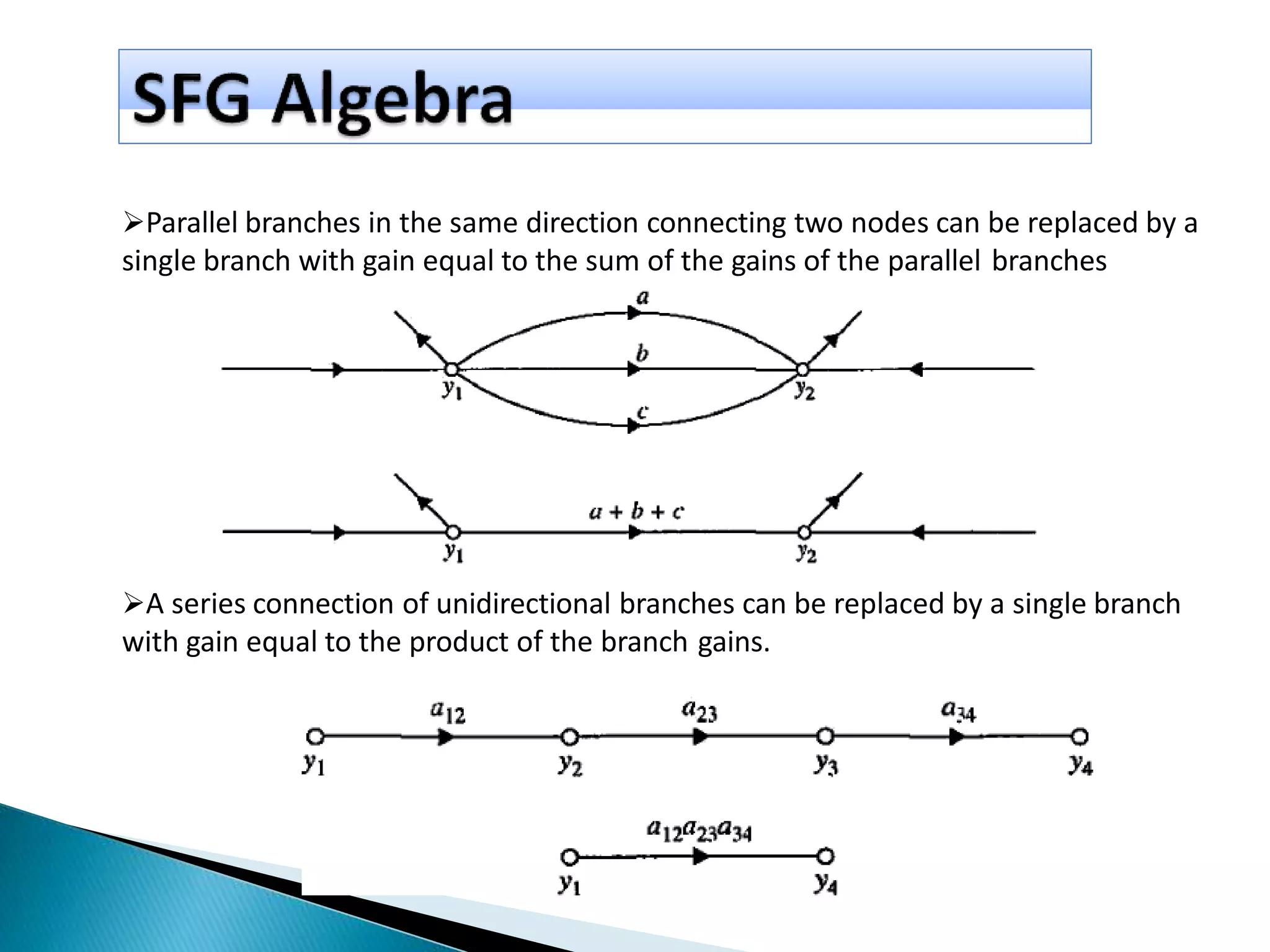
Describes simplification methods for parallel and series connections of branches in SFG.
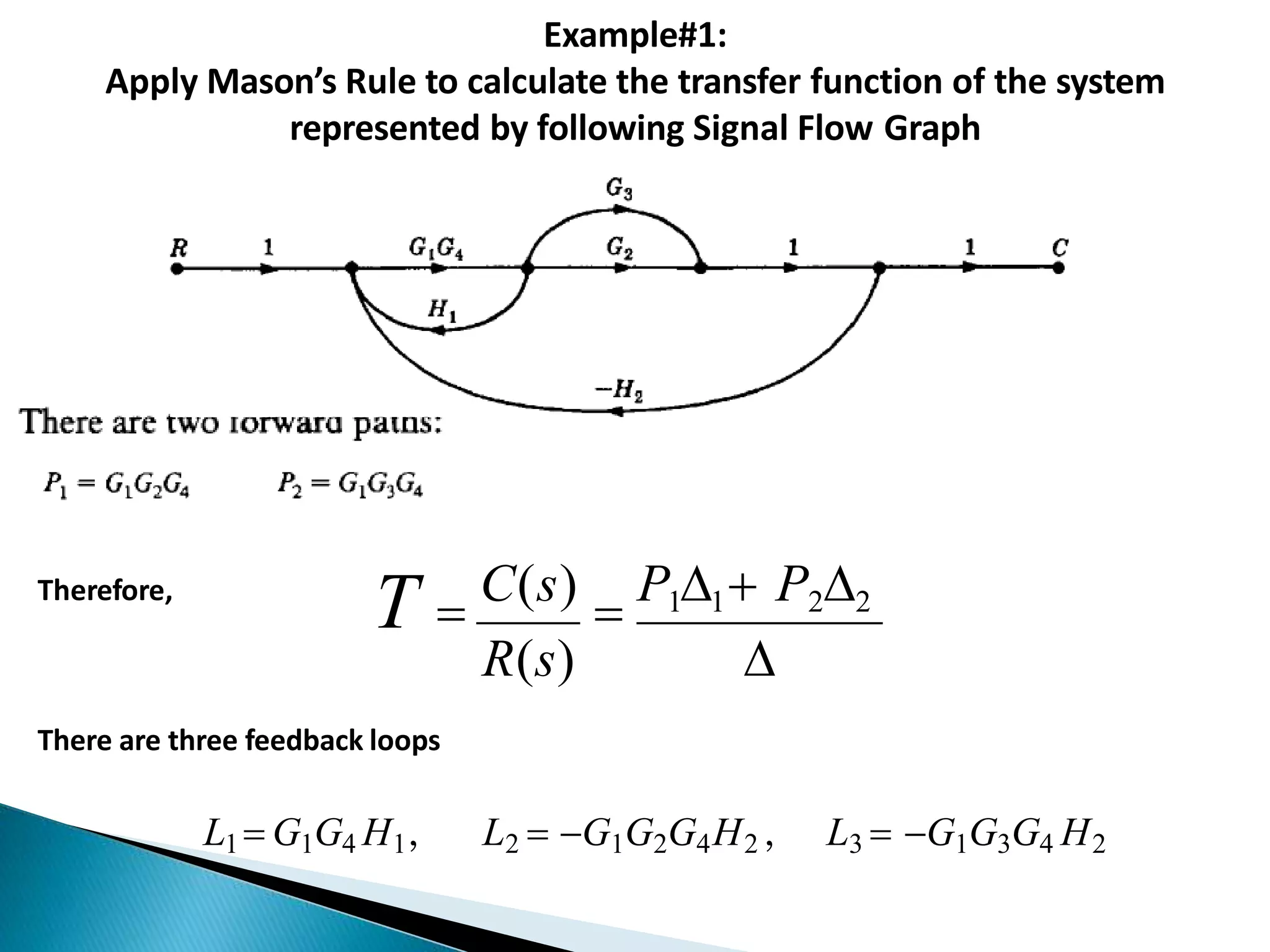
Introduces example application of Mason's Rule to calculate system transfer functions.
Details the characteristic function Δ and its relation to signal flow graph transfer functions.
Outlines steps to calculate the determinant Δ using forward paths and loop transmittances.
Provides a stepwise approach to calculate forward path gain, loop functions, and determinants.
Gives an example of calculating the transfer function using Mason’s Rule with feedback loops.
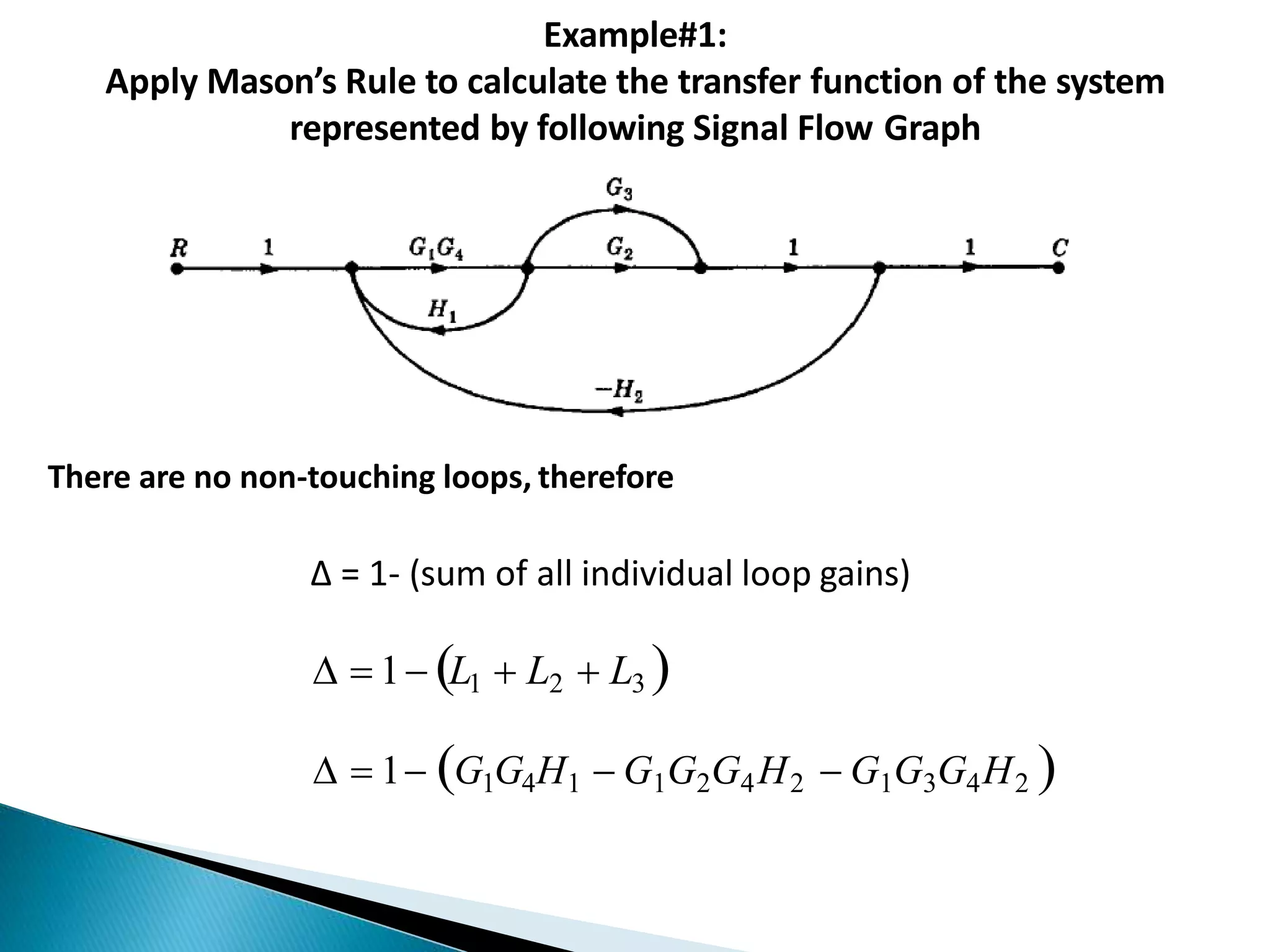
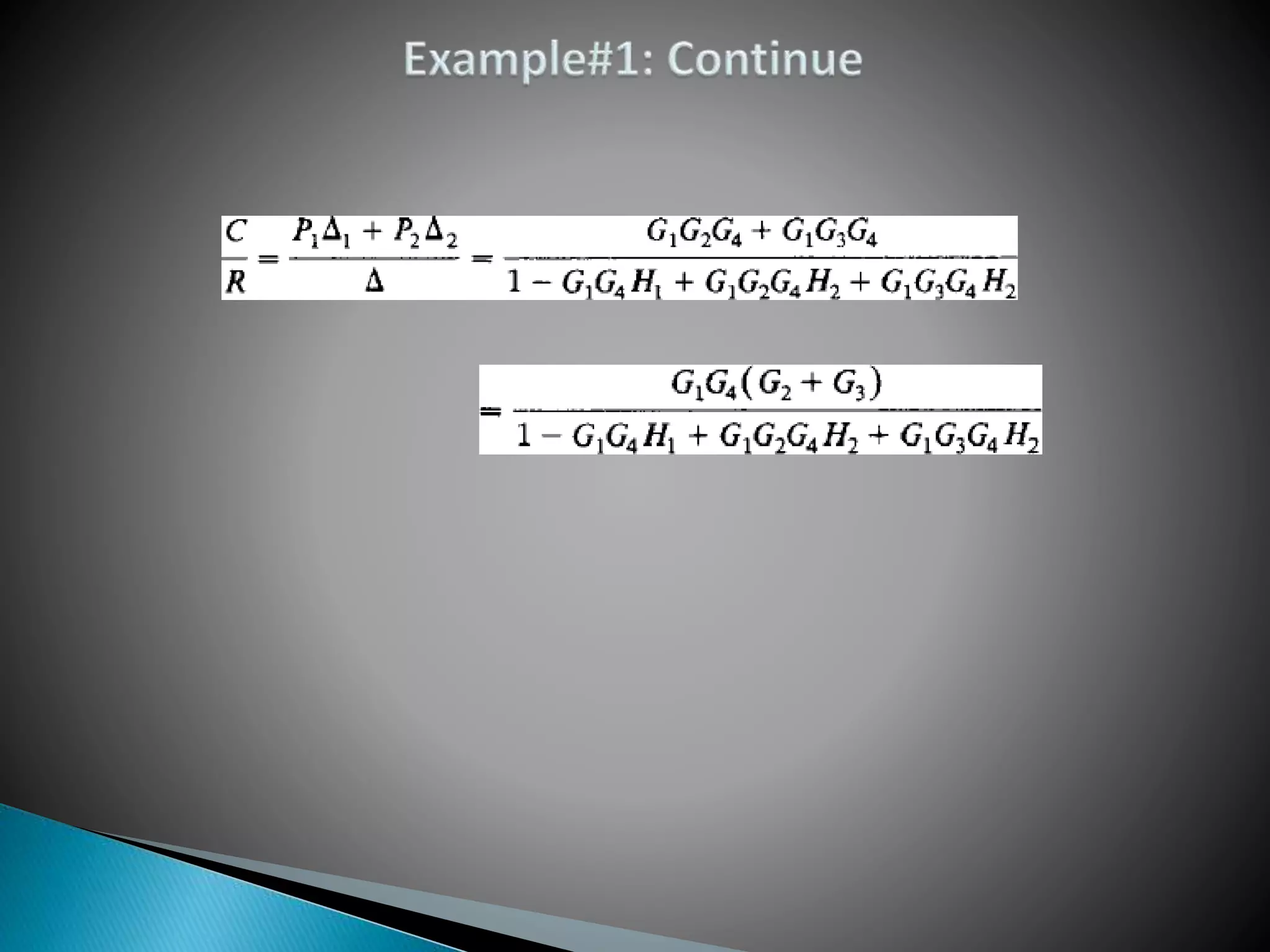
Continues with the example using Mason's Rule, focusing on Δ calculations without non-touching loops.
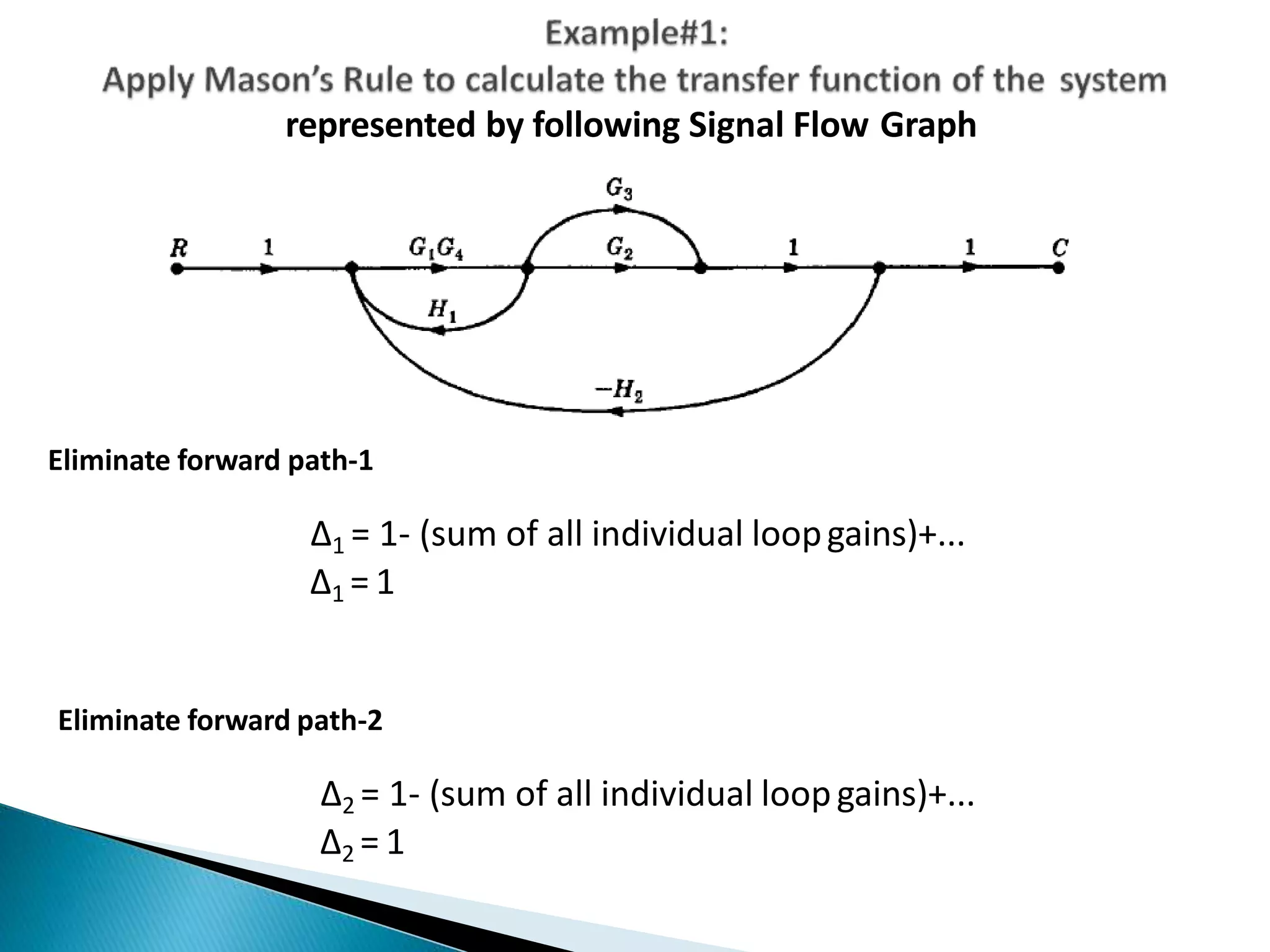
Demonstrates elimination of forward paths in applying Mason's Rule for SFG.
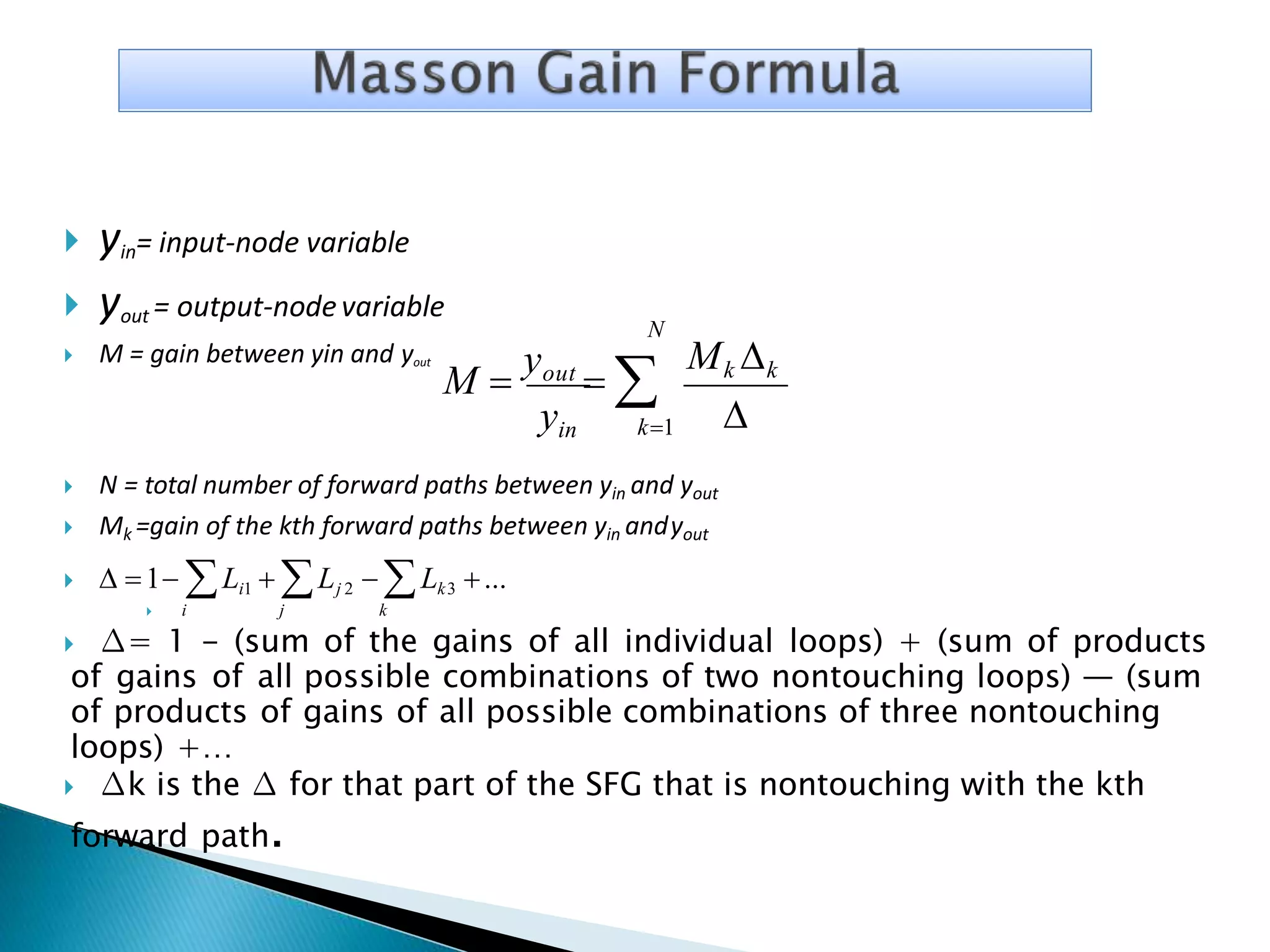
Defines variables of input and output nodes, gain relationships, and includes the Δ calculation.
Provides an example to determine the gain between specific nodes in an SFG using gain formula.
Lists forward paths and their gains for calculation between specified nodes in the SFG.
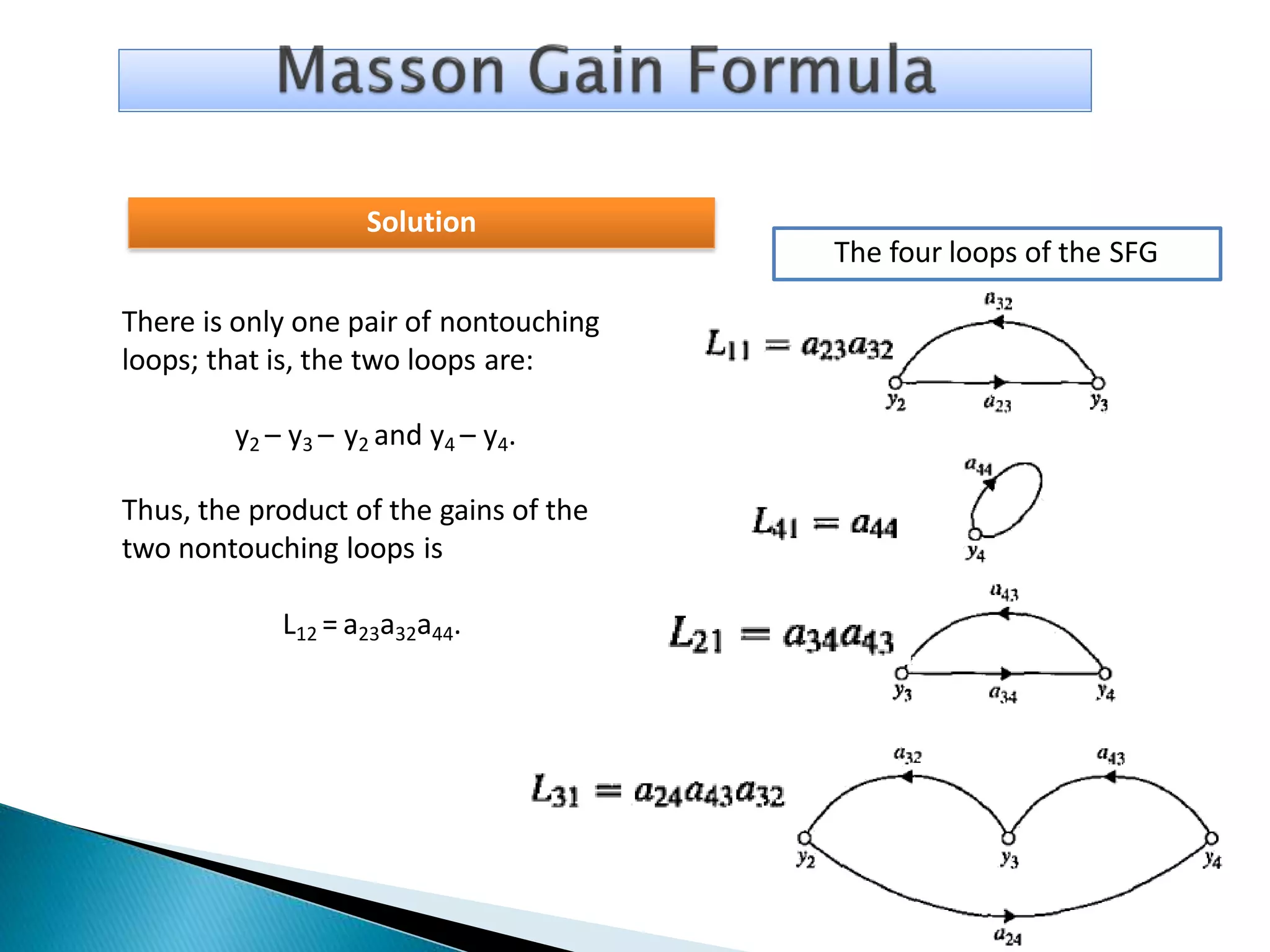
Discusses loops identified in the SFG and their relationships, including nontouching loops.
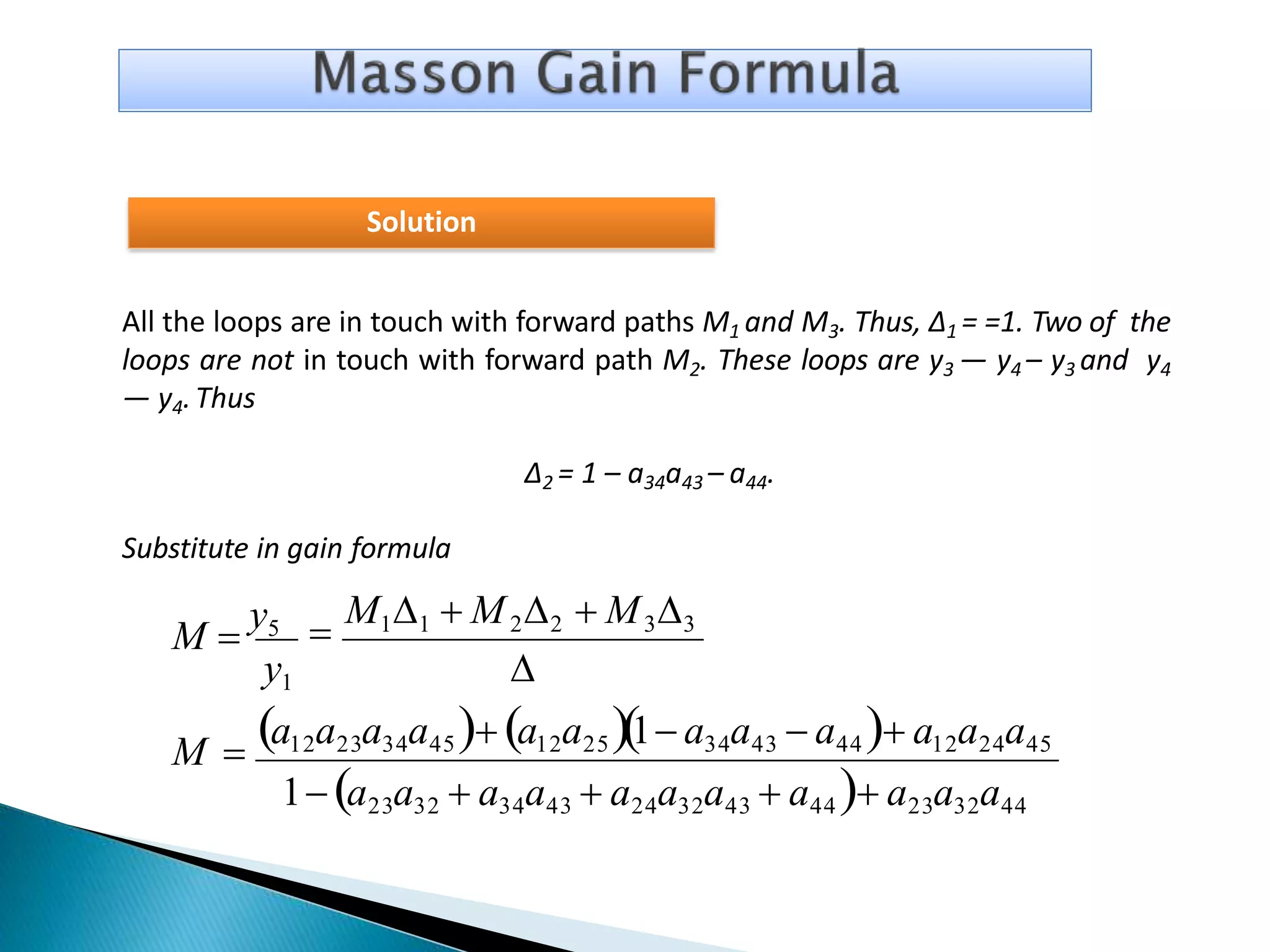
Completes the example by substituting into the gain formula and detailing interaction of loops.













![Reduction of multiple subsystem [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/reductionofmultiplesubsystemcompatibilitymode-110418075355-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)